本文主要是介绍模仿蜘蛛工作原理 苏黎世联邦理工学院研发牛油果机器人可在雨林树冠穿行,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
对于野外环境生物监测的研究人员来讲,收集生物多样性数据已成为日常工作重要组成部分,特别是对于热带雨林的茂密树冠当中活跃着非常多的动物、昆虫与植物。每次勘察都需要研究人员爬上茂密树冠收集数据,一方面增加了数据收集难度,而另一方面危险系数也随之增加。
传统的多旋翼无人机并不适合在茂密的雨林中穿梭,茂密的树冠限制了无人机的活动区域,旋翼也非常容易被树冠枝叶缠住。此外,树冠的高矮,粗细以及纹理的不同,也对攀爬机器人构成了一定的挑战。

部署在茂密树冠中的空中牛油果机器人
为此,苏黎世联邦理工学院开发了一款外观像牛油果的小型机器人产品,该机器人拥有一副3D打印的坚固外壳,机器人内部配备两副旋翼使“牛油果”机器人能够自由在雨林树冠中穿行,该机器人能够帮助研究人员收集树冠高处的生物栖息地数据。
▍像蜘蛛一样工作 牛油果机器人的工作原理是怎样的?
牛油果机器人的工作原理更像是蜘蛛。与传统自下而上的测量方式不同,该机器人从树顶端上方进入,被一根细软的缆绳拴在树冠顶端,缓缓下降到树冠当中。这个思路源于科研人员观察蜘蛛产生的,因为蜘蛛也会使用丝线来跳伞,不过在目前的测试阶段,研究人员仍须通过爬树手动拴住机器人。
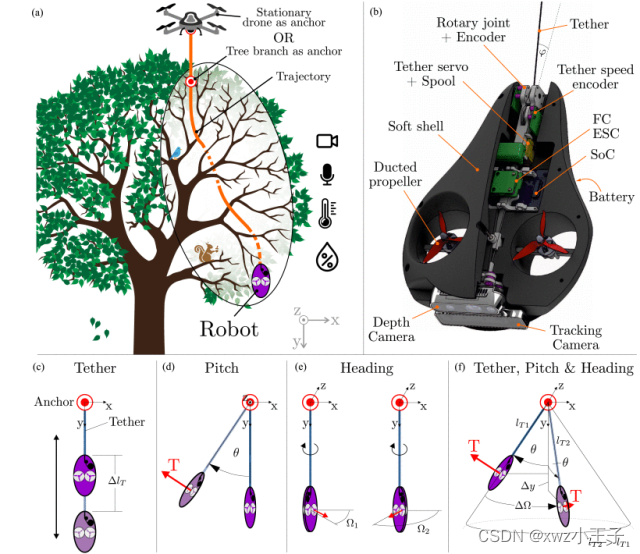
AVOCADO 的运动概念和设计
这项研究当中,无人机被当成母机,能够将机器人运送到难以接近的区域,并将其固定在树的最上部枝干上。一旦“牛油果”机器人被固定好,通过背部外壳上隐藏着绞盘,就能实现自由上下移动,同样绳索也会伴随着机器人伸长或缩短。
从画面当中可以看到机器人隆起部分就是“牛油果”机器人的最核心的两个旋翼单元,该机器人通过旋翼提供动力,绕过树枝、树叶和其他障碍物。
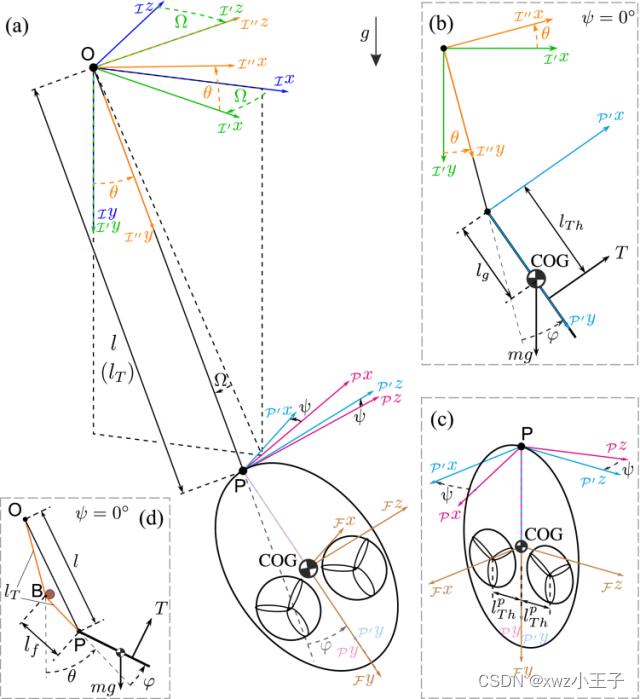
模型和坐标框架定义
研究小组通过电脑进行模拟,研究“牛油果”机器人如何通过熟练使用背部绞盘和两个旋翼实现自主移动,该研究成果发表在IEEE Transactions on Robotics上。

此外研究人员透露,“牛油果”机器人集成的摄像头能够接收环境信息,但实际测试当中,并不像设想当中的那么理想,树冠的照明条件非常困难,经常会遇到光线明暗交替的情况,这也导致摄像头采集到的画面过曝或者过暗,并且这种切换非常频繁。为此,团队正在研究新型摄像头来在复杂光线下也能具备稳定感知能力。
这篇关于模仿蜘蛛工作原理 苏黎世联邦理工学院研发牛油果机器人可在雨林树冠穿行的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





