本文主要是介绍学习笔记:斯坦福2017季CS231n深度视觉识别课程视频(by Fei-Fei Li, Justin Johnson, Serena Yeung)最优化笔记,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
最优化(上)
简介
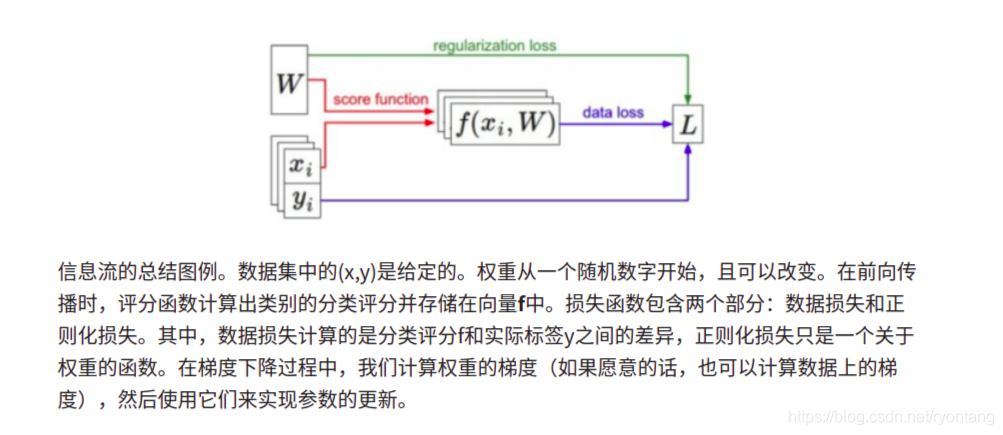
对于图像数据xi,如果基于参数集W做出的分类预测与真实情况比较一致,那么计算出来的损失值L就很低。现在介绍第三个,也是最后一个关键部分:最优化Optimization。最优化是寻找能使得损失函数值最小化的参数W的过程。
损失函数可视化
最优化
策略#1:随机搜索
核心思路:迭代优化。当然,我们肯定能做得更好些。核心思路是:虽然找到最优的权重W非常困难,甚至是不可能的(尤其当W中存的是整个神经网络的权重的时候),但如果问题转化为:对一个权重矩阵集W取优,使其损失值稍微减少。那么问题的难度就大大降低了。换句话说,我们的方法从一个随机的W开始,然后对其迭代取优,每次都让它的损失值变得更小一点。
我们的策略是从随机权重开始,然后迭代取优,从而获得更低的损失值。
蒙眼徒步者的比喻:一个助于理解的比喻是把你自己想象成一个蒙着眼睛的徒步者,正走在山地地形上,目标是要慢慢走到山底。在CIFAR-10的例子中,这山是30730维的(因为W是3073x10)。我们在山上踩的每一点都对应一个的损失值,该损失值可以看做该点的海拔高度。
策略#2:随机局部搜索
第一个策略可以看做是每走一步都尝试几个随机方向,如果某个方向是向山下的,就向该方向走一步。这次我们从一个随机W开始,然后生成一个随机的扰动dW ,只有当[公式]的损失值变低,我们才会更新。这个过程的具体代码如下:
W = np.random.randn(10, 3073) * 0.001 # 生成随机初始W
bestloss = float("inf")
for i in xrange(1000):step_size = 0.0001Wtry = W + np.random.randn(10, 3073) * step_size # 有随机扰动loss = L(Xtr_cols, Ytr, Wtry)if loss < bestloss:W = Wtrybestloss = lossprint 'iter %d loss is %f' % (i, bestloss)使用同样的数据(1000),这个方法可以得到21.4%的分类准确率。这个比策略一好,但是依然过于浪费计算资源。
策略#3:跟随梯度
前两个策略中,我们是尝试在权重空间中找到一个方向,沿着该方向能降低损失函数的损失值。其实不需要随机寻找方向,因为可以直接计算出最好的方向,==这就是从数学上计算出最陡峭的方向。这个方向就是损失函数的梯度(gradient)。==在蒙眼徒步者的比喻中,这个方法就好比是感受我们脚下山体的倾斜程度,然后向着最陡峭的下降方向下山。
在一维函数中,斜率是函数在某一点的瞬时变化率。梯度是函数的斜率的一般化表达,它不是一个值,而是一个向量。在输入空间中,梯度是各个维度的斜率组成的向量(或者称为导数derivatives)。(这是我理解梯度最深的一次 。对一维函数的求导公式如下:
当函数有多个参数的时候,我们称导数为偏导数。而梯度就是在每个维度上偏导数所形成的向量。
最优化(下)
梯度计算
计算梯度有两种方法:一个是缓慢的近似方法(数值梯度法),但实现相对简单。另一个方法(分析梯度法)计算迅速,结果精确,但是实现时容易出错,且需要使用微分。现在对两种方法进行介绍:
使用有限差值进行数值计算
上节中的公式已经给出数值计算梯度的方法。下面代码是一个输入为函数f和向量x,计算f的梯度的通用函数,它返回函数f在点x处的梯度:
def eval_numerical_gradient(f, x):""" 一个f在x处的数值梯度法的简单实现- f是只有一个参数的函数- x是计算梯度的点""" fx = f(x) # 在原点计算函数值grad = np.zeros(x.shape)h = 0.00001# 对x中所有的索引进行迭代it = np.nditer(x, flags=['multi_index'], op_flags=['readwrite'])while not it.finished:# 计算x+h处的函数值ix = it.multi_indexold_value = x[ix]x[ix] = old_value + h # 增加hfxh = f(x) # 计算f(x + h)x[ix] = old_value # 存到前一个值中 (非常重要)# 计算偏导数grad[ix] = (fxh - fx) / h # 坡度it.iternext() # 到下个维度return grad
根据上面的梯度公式,代码对所有维度进行迭代,在每个维度上产生一个很小的变化h,通过观察函数值变化,计算函数在该维度上的偏导数。最后,所有的梯度存储在变量grad中。
在梯度负方向上更新:在上面的代码中,为了计算W_new,要注意我们是向着梯度df的负方向去更新,这是因为我们希望损失函数值是降低而不是升高。
步长的影响
效率的问题
微分计算梯度
使用有限差值近似计算梯度比较简单,但缺点在于终究只是近似(因为我们对于h值是选取了一个很小的数值,但真正的梯度定义中h趋向0的极限),且耗费计算资源太多。
第二个梯度计算方法是利用微分来分析,能得到计算梯度的公式(不是近似),用公式计算梯度速度很快,唯一不好的就是实现的时候容易出错。为了解决这个问题,在实际操作时常常将分析梯度法的结果和数值梯度法的结果作比较,以此来检查其实现的正确性,这个步骤叫做梯度检查。

梯度下降
现在可以计算损失函数的梯度了,程序重复地计算梯度然后对参数进行更新,这一过程称为梯度下降,他的普通版本是这样的:
# 普通的梯度下降
while True:weights_grad = evaluate_gradient(loss_fun, data, weights)weights += - step_size * weights_grad # 进行梯度更新
在这里插入代码片
这个简单的循环在所有的神经网络核心库中都有。虽然也有其他实现最优化的方法(比如LBFGS),但是到目前为止,梯度下降是对神经网络的损失函数最优化中最常用的方法。
课程中,我们会在它的循环细节增加一些新的东西(比如更新的具体公式),但是核心思想不变,那就是我们一直跟着梯度走,直到结果不再变化。
小节
参考来源:
https://zhuanlan.zhihu.com/p/21360434?refer=intelligentunit
这篇关于学习笔记:斯坦福2017季CS231n深度视觉识别课程视频(by Fei-Fei Li, Justin Johnson, Serena Yeung)最优化笔记的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






