ardupilot专题

ardupilot 计算悬停油门的方法
#目录 文章目录 摘要1.计算过程1.悬停油门值更新2.更新油门控制输入滤波值 摘要 本节主要记录ardupilot计算悬停油门值的方法,欢迎批评指正。ardupilot计算悬停油门对于进行稳定的高度控制至关重要。 1.计算过程 根据垂直速度PID输出或者垂直加速度PID输出,得到控制电机保持在一定高度的pwm值,根据这个值在一定条件下计算出悬停油门值。 1.悬停油门值更
Pixhawk_Ardupilot_Makefile文件调用关系
www.ncnynl.com/archives/201607/307.html www.05935.com/bc/245795/ Ardupilot代码的编译文件都存放在Ardupilot/MK/目录下,所有类型的编译都是从Ardupilot/mk/apm.mk开始, apm.mk:首先获取编译系统类型,cygwin还是其它 ├─environ.mk ├─help.m
ardupilot开发 --- Jetson Orin Nano 后篇
我拼命加速,但贫穷始终快我一步 0~1920. visp-d455:基于IBVS的Pixhawk无人机视觉伺服20.1 基础关于连接、通讯、UDP forward服务:一些相关的、有用的例程Linux C++程序的gdb断点调试搭建仿真解决【testPixhawkDroneTakeoff.cpp例程能解锁但起飞命令无响应,断点模式下却有响应】问题解决【使用最新的mavsdk版本导致vis

Ardupilot编译流程分析
▉<=2=>▉---------------------------------------------------------------->>>>>> 编译流程分析 ▉<=2=>▉---------------------------------------------------------------->>>>>> <1>.在ardupilot/ArduCopter/键入:
Ardupilot入口分析
▉<=1=>▉---------------------------------------------------------------->>>>>> 入口函数分析 ▉<=1=>▉---------------------------------------------------------------->>>>>> ArduCopter.cpp 文件的最后一行为整个代码入口main,
Ardupilot编译脚本
######################################################################## # File Name: x.sh # Author: XXDK # Email: v.manstein@qq.com # Created Time: 2016年12月28日 星期三 23时58分43秒 #########################

基于Ardupilot/PX4固件,APM/PIXhawk硬件的VTOL垂直起降固定翼软硬件参数调试(第二篇)软硬件参数调试
基于Ardupilot/PX4固件,APM/PIXhawk硬件的VTOL垂直起降固定翼软硬件参数调试(第二篇)软硬件参数调试 本文内容大部分来自Kris,我们的K大,在VTOL领域的大牛,在此,非常感谢K大。能引用K大的成果也是自己的荣幸,不便之处还请K大多多包涵,在此引用只是为方便自己日常学习,部分参数表里根据自身情况,增加了修改环节和相应参数。 垂直起降固定翼 中文教程-参数设置 垂直起
Ardupilot Rpanion 4GLTE 网络性能测试 - 国内中转
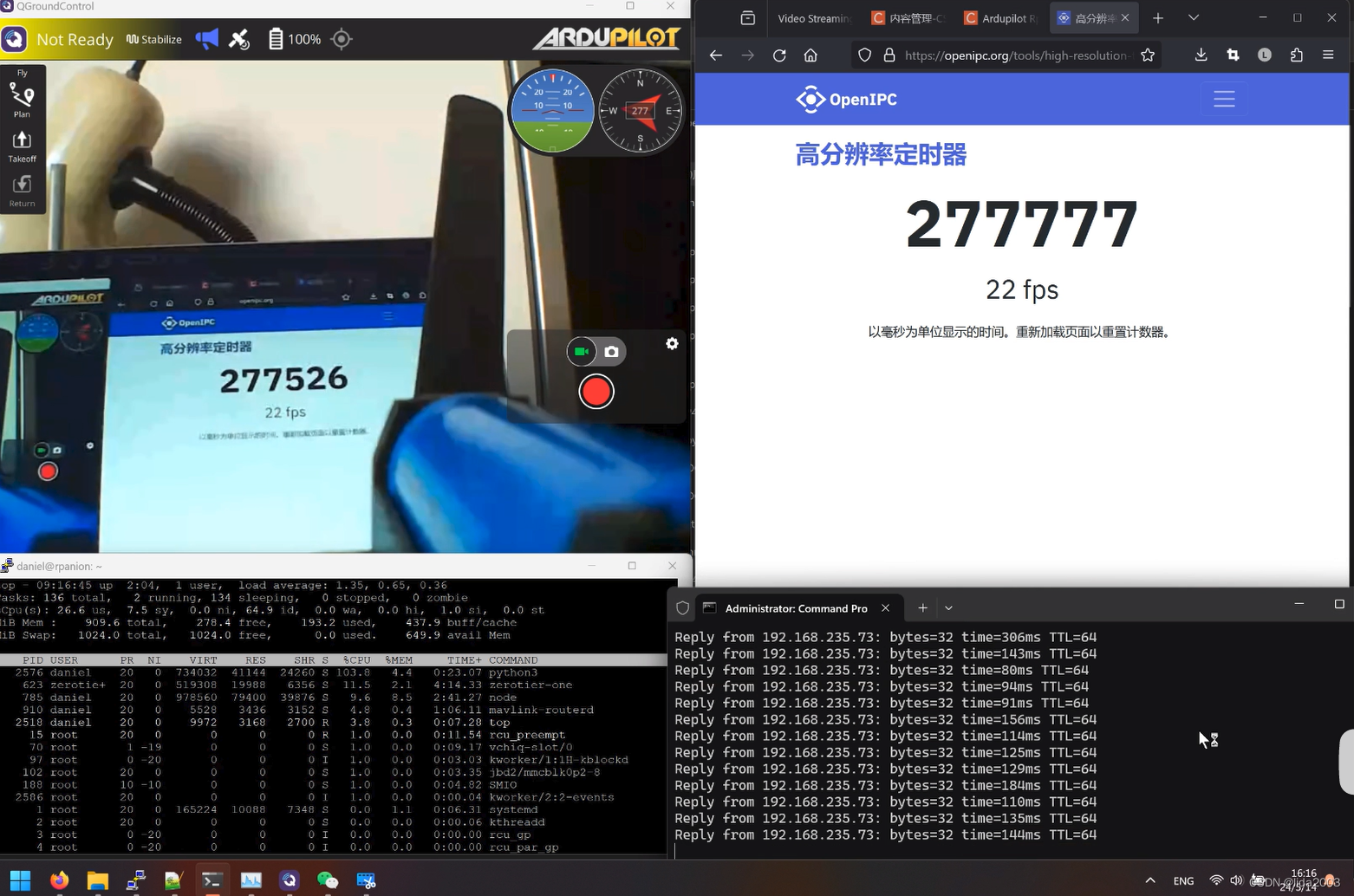
Ardupilot Rpanion 4GLTE 网络性能测试 - 国内中转 1. 源由2. 视频效果2.1 整体刷新率不高2.2 网络延迟可接受2.3 带宽增加丢包明显2.4 实测效果流畅 3. 总结 1. 源由 上一次,由于ZeroTier使用了国外服务器,延迟~ 569 ms,花屏、卡顿。 本着不折腾到底,誓不罢休的精神,本次我们将ZeroTier切换到了国内中转服务器。
Ardupilot开源代码之Rover上路 - 后续1
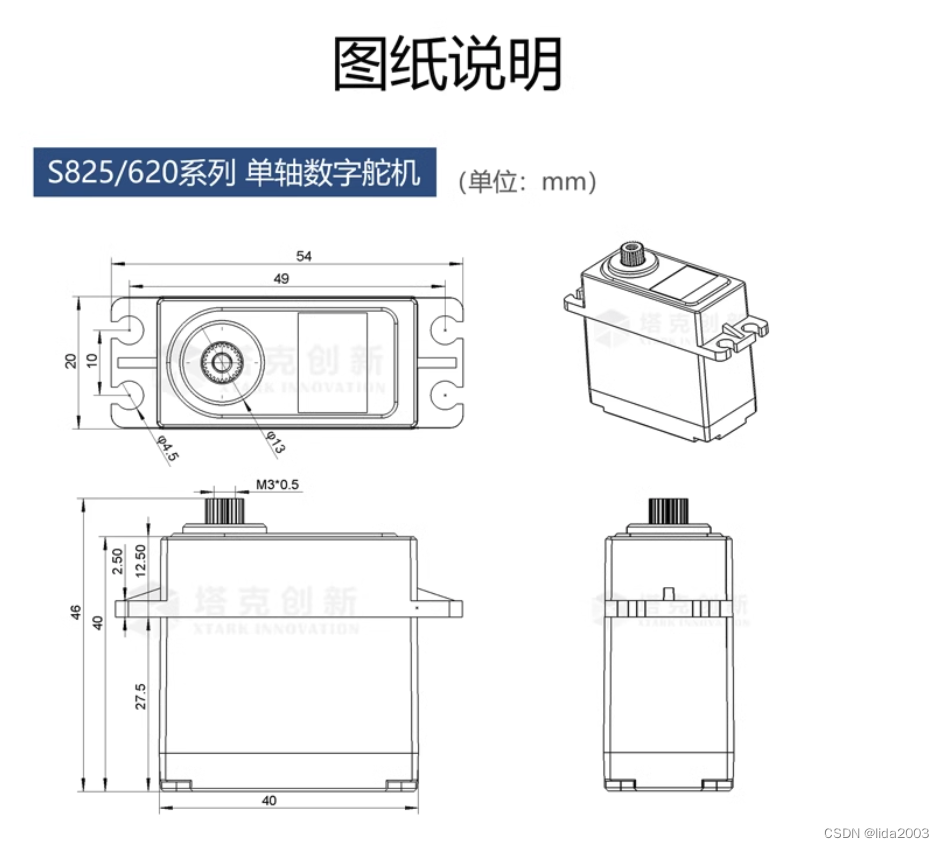
Ardupilot开源代码之Rover上路 - 后续1 1. 源由2. 问题汇总2.1 问题1:飞控选择2.2 问题2:飞控安装位置和固定2.3 问题3:各种插头、插座配套2.4 问题4:分电板缺陷2.5 问题5:电机+编码器接线及正反向问题2.6 问题6:Ardupilot是否支持编码器? 3. 基础知识3.1 电机工作电压3.2 编码器工作原理3.3 舵机规格 4. 参考资料

关于Ardupilot的固定翼(plane)的控制
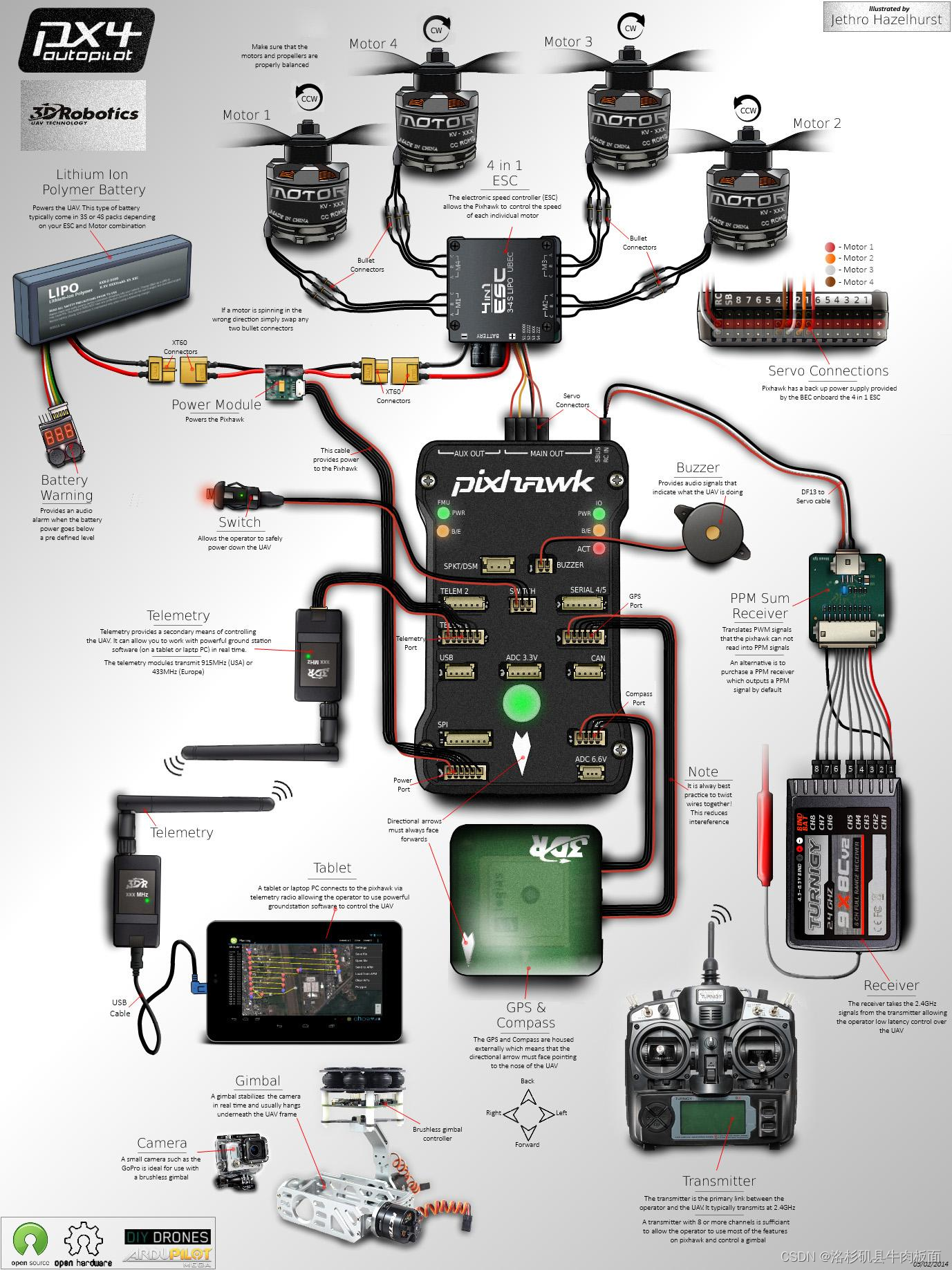
起因 由于项目原来是使用的四旋翼,并且是PX4版本的四旋翼; 如今需要对无人机固定翼进行控制,并要求使用Ardupilot的固件进行研究。 特定在此记录对固定翼的学习,以和大家分享观点和交流学习。 PX4和Ardupilot关系 PX4和Ardupilot都是固件,固件就是软件的意思。两者都是无人机开源组织发行的开源版无人机驾驶固件。 APM和pixhawk是硬件平台,在之前,APM是Ard
Ardupilot开源代码之Rover上路计划
Ardupilot开源代码之Rover上路计划 1. 源由2. 思路3. 计划3.1 底盘3.1.1 底盘架子3.1.2 电机参数3.1.3 编码器参数3.1.4 舵机参数 3.2 电子部件3.2.1 有刷电调3.2.2 APM飞控 3.3 系统框图 5. 参考资料 1. 源由 最近研究点无人机的东西,注意不是穿越机。个人感觉穿越机和无人机最大的不同就是定位的目标人群差异。 有
ArduPilot开源飞控之ROS系统简介
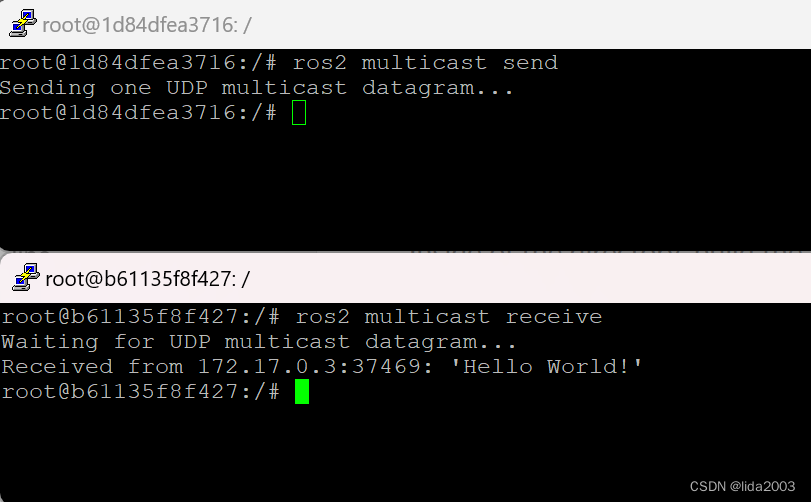
ArduPilot开源飞控之ROS系统简介 1. 源由2. ROS系统3. 安装2.1 安装Docker2.2 安装ROS2 4. 总结5. 补充资料 1. 源由 之前在ArduPilot开源飞控之硬件SBC分析中讨论过,个人角度最推荐其中两个系统是: Rpanion-server【推荐,简单】BlueOS【推荐,完备】ROS【专门讨论,开源/复杂】 从功能角度看BlueOS
pixhawk控制板的ArduPilot固件编译
0. 环境 - ubuntu18(依赖python2和pip,建议直接ubuntu18不用最新的) - pixhawk 2.4.8 - pixhawk 4 1. 获取源码 # 安装git sudo apt install git # 获取源码 cd ~/workgit clone --recurse-submodules https://github.com/ArduPilot/ar
ArduPilot开源飞控之lida2003套机+伴机电脑首飞
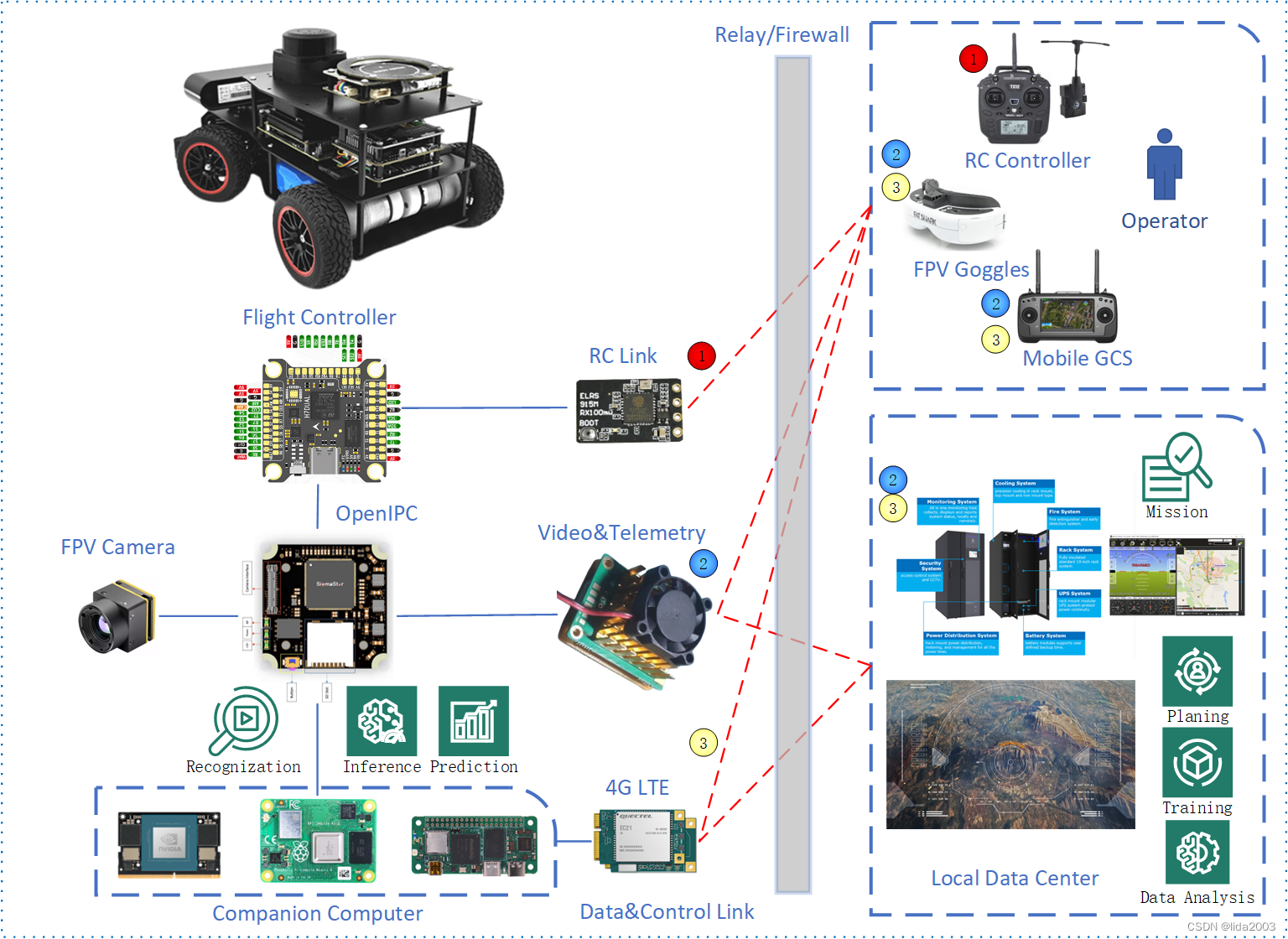
ArduPilot开源飞控之lida2003套机+伴机电脑首飞 1. 源由2. 问题3. 平台测试4. 功能测试5. 参考资料 1. 源由 最近由于一些琐事耽搁了伴机电脑上天的事情,今天总算是找补回来了。 主要的目的是,扩展Ardupilot的应用功能,侧重图像识别环节的应用。 ArduPilot开源代码之CompanionComputer上天计划ArduPilot开源飞控之
ardupilot安装python
目录 文章目录 目录摘要1.安装过程 摘要 本节主要记录如何安装ardupilot 的python开发环境,主要参考b站视频B站视频ubuntu 安装python-3.10.0 1.安装过程 sudo apt update sudo apt install wget build-essential checkinstall wget https://www.pyth
无人机/飞控--ArduPilot、PX4学习记录(4)
这是一篇碎碎念,零零碎碎的记录了小组准备竞赛的过程,写的挺乱,仅供本人记录学习历程和参考。 本章主要完成的目标:调试地面站 GPS、加速度校准;试飞并炸机 目录 地面站(QGC)安装(*未完成) 地面站Mission Planner 1.3.60安装: 飞控与地面站连接、校准 遥控器对频 连接四个螺旋桨 >在前几篇博客中我只是安装好了python3.8,但是并没有将

ardupilot开发 --- 远程标识 篇
1. wifi协议 https://zhuanlan.zhihu.com/p/660568077 AP 无线接入点 路由器STA 站点 接入路由器的终端SSID 标识符 无线网络的名称信标祯 Beacon AP通过广播Beacon祯来告诉想要接入者(STA)无线网络的信息,如SSIDWLAN数据帧 Wi-Fi网络中传输数据时所使用的数据帧格式。 管理帧、控制帧、数据帧 管理帧:用来完成AP和终
ardupilot开发 --- 机载(边缘)计算机-VISP 篇
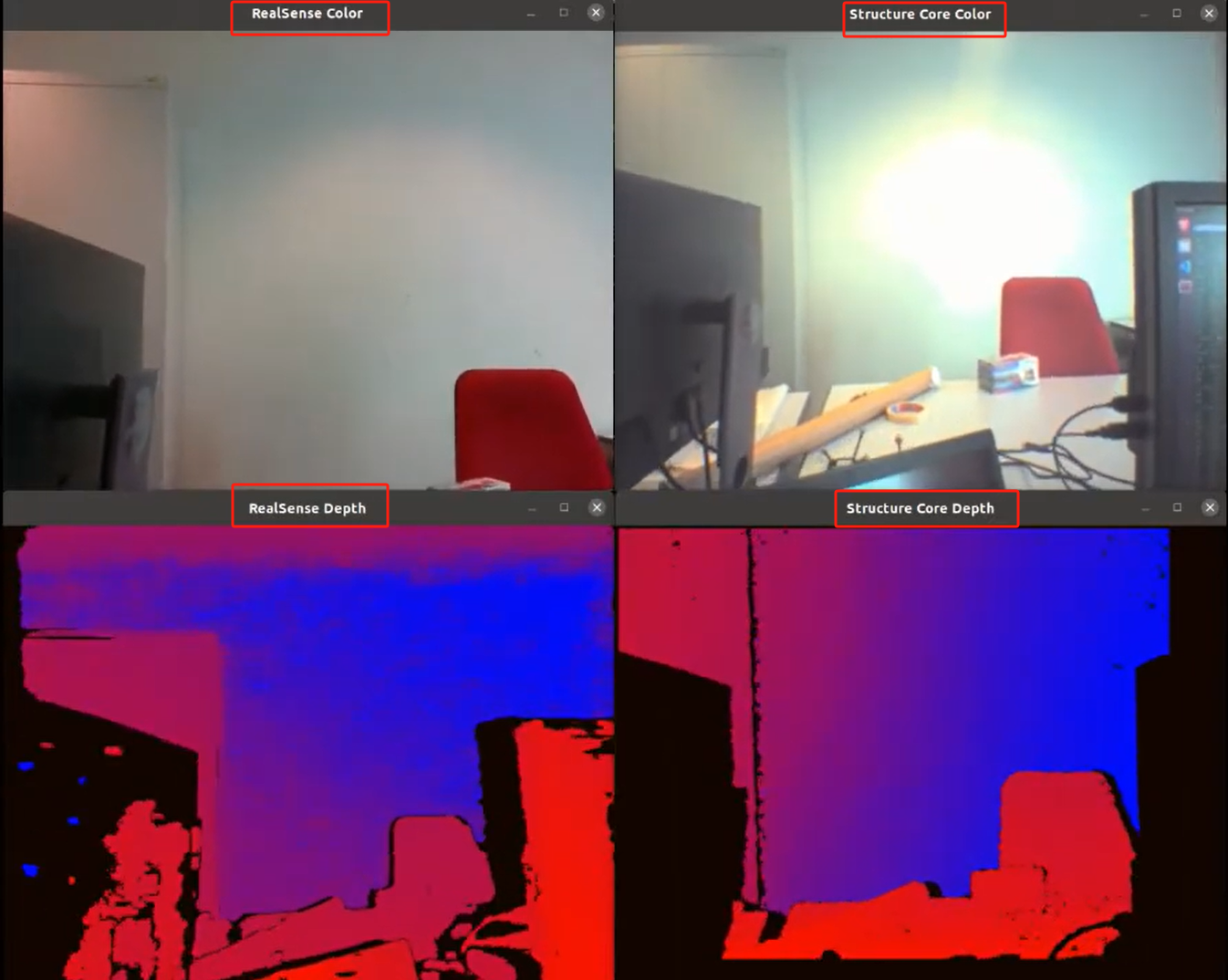
啊啊啊我的妻王氏宝钏 1. 一些概念2. 支持的硬件3. 支持的第三方库4. 安装4.1 快速安装VISP4.2 第三方库的(可选)安装 5. 下载测试数据6. tips7. 如何在应用程序中使用(引用)VISP?8. 帮助文档8.1 基本的矩阵向量运算8.2 图像操作8.2.1 在图像显示窗口绘制图像8.2.2 在图像显示窗口加载、显示、绘制图像8.2.2 无显示窗口的情况下在图像上添加基
ardupilot开发 --- handle_message 篇
mavlink 消息非常重要的几个函数: 解码:xxx_decode(&msg, &packet)handle_message 下面分析他们的调用、被调用逻辑: 如 AP_Camera::handle_message(chan, msg)) 调用AP_Camera_xx::handle_message(chan, msg) 谁调用了AP_Camera::handle_message? 待续…
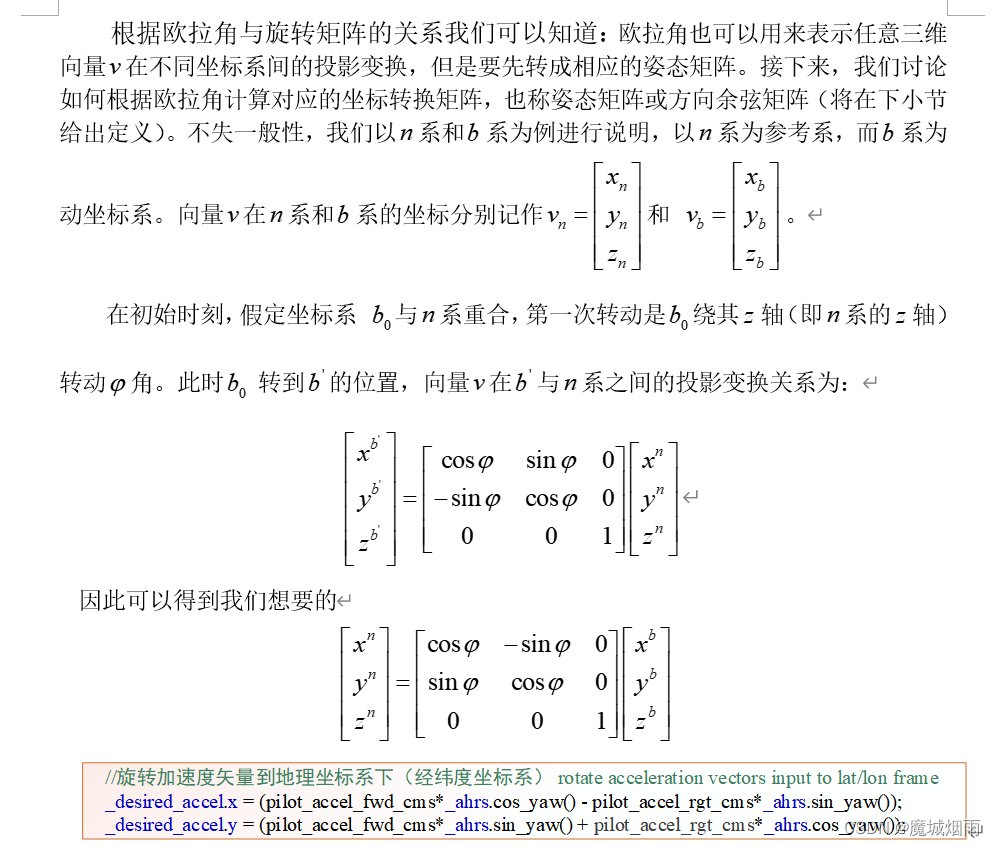
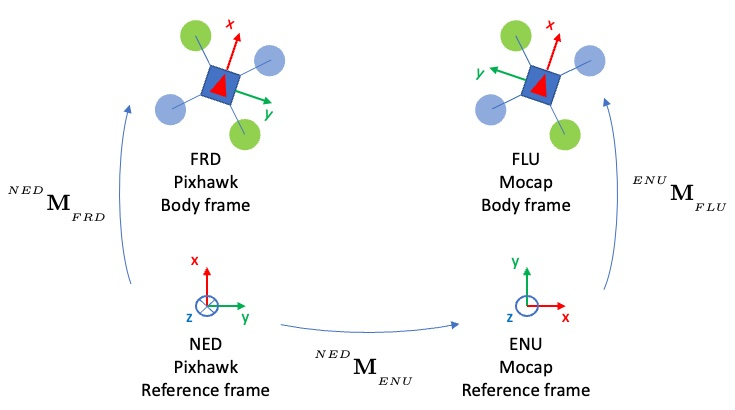
ardupilot 遥控器输入量如何转换成目标加速度
目录 文章目录 目录摘要1.理论依据2程序细节分析3.代码实现 摘要 主要根据遥控器的横滚,俯仰通道值转换成对应的欧拉角度,然后根据欧拉角度转换成地理坐标系下的目标加速度的过程。 1.理论依据 2程序细节分析 根据公式(8)我们可以得到前右下坐标系下对应的加速度: 到这里我们得到了前右下坐标系下的加速度,此时我们只需要转换到地理坐标系即可。 3.代码实现 很
ardupilot开发 --- RTSP多媒体数据流(视频流) 篇
0. 一些概念 RTSP是 TCP/IP 协议体系中的一个应用层协议,该协议定义了一对多应用程序如何有效地通过 IP 网络传送多媒体数据。RTSP在体系结构上位于RTP和RTCP之上,它使用TCP或UDP完成数据传输。 在mission planner中查看(拉取)RTSP视频流

ardupilot 罗德里格公式的两种推导
目录 文章目录 目录摘要1.等效旋转矢量2.三维旋转3.四元数和罗德里格公式之间的联系 摘要 本节主要记录推导罗德里格公式的过程,可以参看视频不错的视频讲解 1.等效旋转矢量 参看严老师的教材: 步骤一:计算向量O’B 步骤二 :分解向量r到u上和垂直u的向量
ArduPilot之开源代码waf-configure编译
ArduPilot之开源代码waf-configure编译 1. 源由2. `wscript`脚本3. `wscript`功能4. `configure`调用关系5. 总结6. 参考资料 1. 源由 ./waf configure --board Aocoda-RC-H743Dual是配置Ardupilot目标板的命令,该命令将根据硬件配置文件生成相应用于编译的目标板源代码文件。

Ardupilot飞控Mavlink代码学习
摘自:https://blog.csdn.net/lixiaoweimashixiao/article/details/80919995 Ardupilot飞控Mavlink代码学习 魔城烟雨 2018-07-05 23:36:33 4302 收藏 19 分类专栏: ardupilot学习 版权 目录 目录摘要1.Ardupilot怎么实现Mavlink初始化2.M
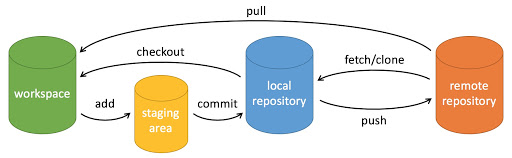
ardupilot开发 --- git 篇
一些概念 工作区:就是你在电脑里能看到的目录;暂存区:stage区 或 index区。存放在 :工作区 / .git / index 文件中;版本库:本地仓库,存放在 :工作区 / .git 中 关于 HEAD 是所有本地分支的游标(指针);HEAD既可以指向某个分支,还可以指向某个分支的某个(次)提交;HEAD指向谁,谁就是和当前工作区、暂存区、相关联的分支,即:对于add、checkout、
四旋翼Ardupilot固件编译教程
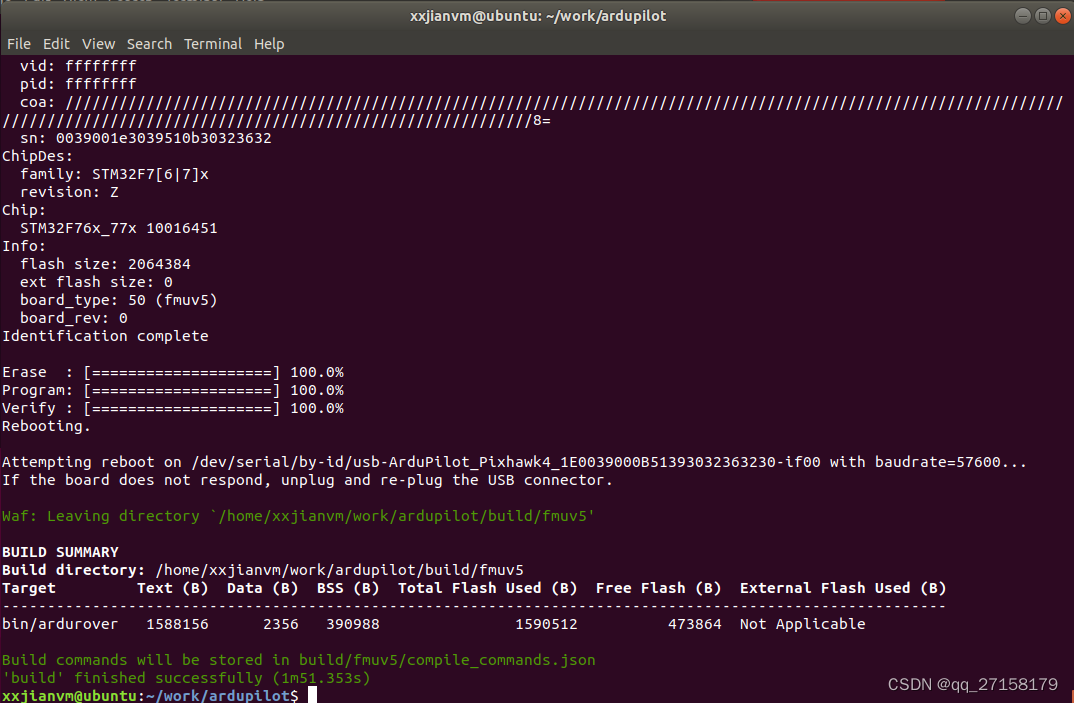
四旋翼Ardupilot固件编译教程 在Windows平台下编译四旋翼ardupilot固件教程。 目录 四旋翼Ardupilot固件编译教程一、源代码克隆1. 克隆项目2. 切换到ardupilot目录3. 更新子模块 二、切换指定版本1. 查看tag2. 查看分支3. 切换分支4. 查看分支5. 更新子模块 三、编译固件1. 获取Ardupilot支持的硬件列表