本文主要是介绍ArduPilot开源飞控之ROS系统简介,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
ArduPilot开源飞控之ROS系统简介
- 1. 源由
- 2. ROS系统
- 3. 安装
- 2.1 安装Docker
- 2.2 安装ROS2
- 4. 总结
- 5. 补充资料
1. 源由
之前在ArduPilot开源飞控之硬件SBC分析中讨论过,个人角度最推荐其中两个系统是:
- Rpanion-server【推荐,简单】
- BlueOS【推荐,完备】
- ROS【专门讨论,开源/复杂】
从功能角度看BlueOS和Rpanion类似,BlueOS具有更加完备系统以及通过Web方式提供分析工具,换句话说,更接近商业的系统模式。
作为DIY的角度,需要能快速入手,轻松掌握,灵活集成,方便部署,因而ROS更加适合后续的学习和研究。
2. ROS系统
ROS(Robot Operating System)是一组软件库和工具,可以帮助构建机器人应用程序。从驱动程序到最先进的算法,再到强大的开发工具,ROS 拥有在一个机器人项目中所需的一切。而且它全部都是开源的。
自2007年ROS系统起步,今年都已经是2024年了,目前与Ardupilot兼容,APM官网给出可以使用的是ROS2 humble系统。
- 发布周期:每12个月
- 目标对象:Ubuntu LTS
- 支持级别:3级标准
- 层级 1 经过单元测试套件和其他测试工具的测试,包括持续集成作业、夜间作业、打包作业和性能测试。在这些平台中发现的错误或缺陷将由开发团队优先处理。在层级 1 平台中发现的重大错误可能会影响发布日期,在发布新版本之前解决所有已知的高优先级错误。
- 层级 2 平台定期接受持续集成测试,其中包括运行构建和测试,并公开可访问的结果。预期持续集成至少应在 ROS 发行版的当前状态下的相关更改后的一周内运行一次。可能不提供包级二进制包,但鼓励提供构建工作区的可下载存档。层级 2 平台的发布产品版本中可能存在错误。已知的层级 2 平台错误将在资源可用的情况下尽力解决,并且可能在发布新版本之前进行纠正,也可能不进行纠正。一个或多个实体应致力于继续支持该平台。
- 层级 3 平台是指社区报告表明发布是功能性的平台。开发团队不会在层级 3 平台上运行单元测试套件或执行任何其他测试。为了将平台列入此类别,安装说明应可用并保持最新。社区成员可以为这些平台提供帮助。
最近的几个系统:
- Jazzy Jalisco (May 2024 - May 2029),Ubuntu Noble (24.04)
- Humble Hawksbill (May 2022 - May 2027),Ubuntu Jammy (22.04)
APM官网推荐ROS2 humble系统,经过一些资料,目前最新的是iron。
- ROS2 humble Installation
- ROS2 iron Installation
ROS官网HowToGuide
- How-to Guides
3. 安装
基于《ArduPilot开源飞控之lida2003套机+伴机电脑首飞》,将 ROS 2 on Raspberry Pi上安装。
本次使用:2024-03-15-raspios-bookworm-arm64-lite.img,参考:Raspbian镜像无头烧录
根据REP-2000规范、标准,在Raspberry Pi3B+上需要进行Tier 3的安装。简单尝试了下,失败!!!
所以从最简的Docker入手先装下ROS2看看,从嵌入式系统资源有限的角度看,不用Docker是比较好的一种方法,但是实验阶段,可以有两种使用方法:
- Docker ROS2 – UART – Ardupilot
- ROS2 – UART – Ardupilot
2.1 安装Docker
$ curl -fsSL https://get.docker.com -o get-docker.sh
$ sudo sh ./get-docker.sh --dry-run
参考:Install Docker Engine on Debian
- dry-run测试
$ sudo sh ./get-docker.sh --dry-run
# Executing docker install script, commit: e5543d473431b782227f8908005543bb4389b8de
apt-get update -qq >/dev/null
DEBIAN_FRONTEND=noninteractive apt-get install -y -qq apt-transport-https ca-certificates curl >/dev/null
install -m 0755 -d /etc/apt/keyrings
curl -fsSL "https://download.docker.com/linux/debian/gpg" | gpg --dearmor --yes -o /etc/apt/keyrings/docker.gpg
chmod a+r /etc/apt/keyrings/docker.gpg
echo "deb [arch=arm64 signed-by=/etc/apt/keyrings/docker.gpg] https://download.docker.com/linux/debian bookworm stable" > /etc/apt/sources.list.d/docker.list
apt-get update -qq >/dev/null
DEBIAN_FRONTEND=noninteractive apt-get install -y -qq docker-ce docker-ce-cli containerd.io docker-compose-plugin docker-ce-rootless-extras docker-buildx-plugin >/dev/null
- 实际安装
$ sudo sh ./get-docker.sh
# Executing docker install script, commit: e5543d473431b782227f8908005543bb4389b8de
+ sh -c apt-get update -qq >/dev/null
+ sh -c DEBIAN_FRONTEND=noninteractive apt-get install -y -qq apt-transport-https ca-certificates curl >/dev/null
+ sh -c install -m 0755 -d /etc/apt/keyrings
+ sh -c curl -fsSL "https://download.docker.com/linux/debian/gpg" | gpg --dearmor --yes -o /etc/apt/keyrings/docker.gpg
+ sh -c chmod a+r /etc/apt/keyrings/docker.gpg
+ sh -c echo "deb [arch=arm64 signed-by=/etc/apt/keyrings/docker.gpg] https://download.docker.com/linux/debian bookworm stable" > /etc/apt/sources.list.d/docker.list
+ sh -c apt-get update -qq >/dev/null
+ sh -c DEBIAN_FRONTEND=noninteractive apt-get install -y -qq docker-ce docker-ce-cli containerd.io docker-compose-plugin docker-ce-rootless-extras docker-buildx-plugin >/dev/null
+ sh -c docker version
Client: Docker Engine - CommunityVersion: 26.0.1API version: 1.45Go version: go1.21.9Git commit: d260a54Built: Thu Apr 11 10:53:25 2024OS/Arch: linux/arm64Context: defaultServer: Docker Engine - CommunityEngine:Version: 26.0.1API version: 1.45 (minimum version 1.24)Go version: go1.21.9Git commit: 60b9addBuilt: Thu Apr 11 10:53:25 2024OS/Arch: linux/arm64Experimental: falsecontainerd:Version: 1.6.31GitCommit: e377cd56a71523140ca6ae87e30244719194a521runc:Version: 1.1.12GitCommit: v1.1.12-0-g51d5e94docker-init:Version: 0.19.0GitCommit: de40ad0================================================================================To run Docker as a non-privileged user, consider setting up the
Docker daemon in rootless mode for your user:dockerd-rootless-setuptool.sh installVisit https://docs.docker.com/go/rootless/ to learn about rootless mode.To run the Docker daemon as a fully privileged service, but granting non-root
users access, refer to https://docs.docker.com/go/daemon-access/WARNING: Access to the remote API on a privileged Docker daemon is equivalentto root access on the host. Refer to the 'Docker daemon attack surface'documentation for details: https://docs.docker.com/go/attack-surface/================================================================================
2.2 安装ROS2
$ sudo docker pull ros:iron-ros-core
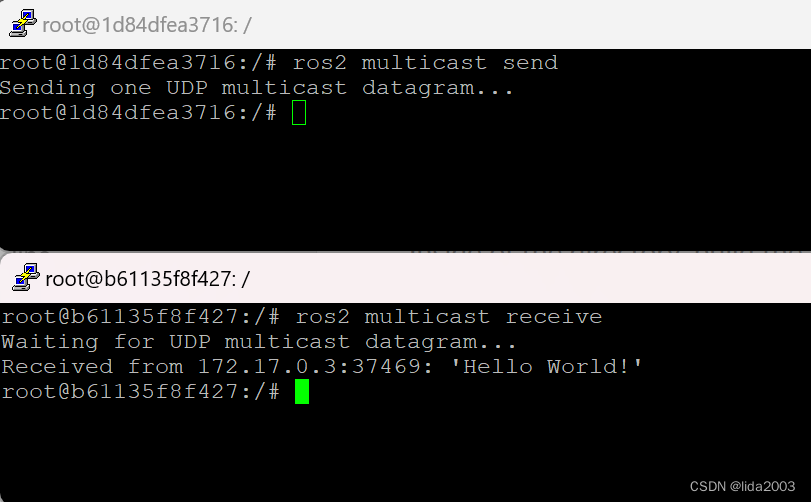
$ sudo docker run -it --rm ros:iron-ros-core
安装测试
4. 总结
ROS2直接按照Tier 3标准安装遇到一些困难,作为初学者,这种环境配置一定是最困难的。
后续,我们慢慢的来充实我们的上天计划,增加我们的“筹码”,最终让我们的计划成功!
5. 补充资料
整理一些,linux下基础的一个工具或者软件安装,很杂,所以大家找自己需要的就好。
【1】ubuntu22.04@laptop 常用基础环境安装
【2】ubuntu下安装基本开发套件
【3】ubuntu软件环境搭建及构建安装(C语言)
【4】putty登录默认安装ubuntu,中文显示乱码问题
这篇关于ArduPilot开源飞控之ROS系统简介的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








