飞控专题
如何成为一个飞控算法工程师?
兄弟,这个问题问得好,但也别想着靠看几本书就能一步登天。飞控算法这玩意儿,真要干好了,不是简简单单几个公式几个库就能搞定的。你本科电子专业有点基础,玩过四轴飞行器也算是入门了,但要搞真算法?咱得往深里挖,往实里掏。 要成为一个飞控算法工程师,需要综合多方面的知识、技能和经验。以下是一个详细的指南,帮助有志于此的人规划职业发展路径: 一、教育背景与专业知识 1. 学历与专业:
精准操控,稳如磐石:飞控+综控系统仿真揭秘
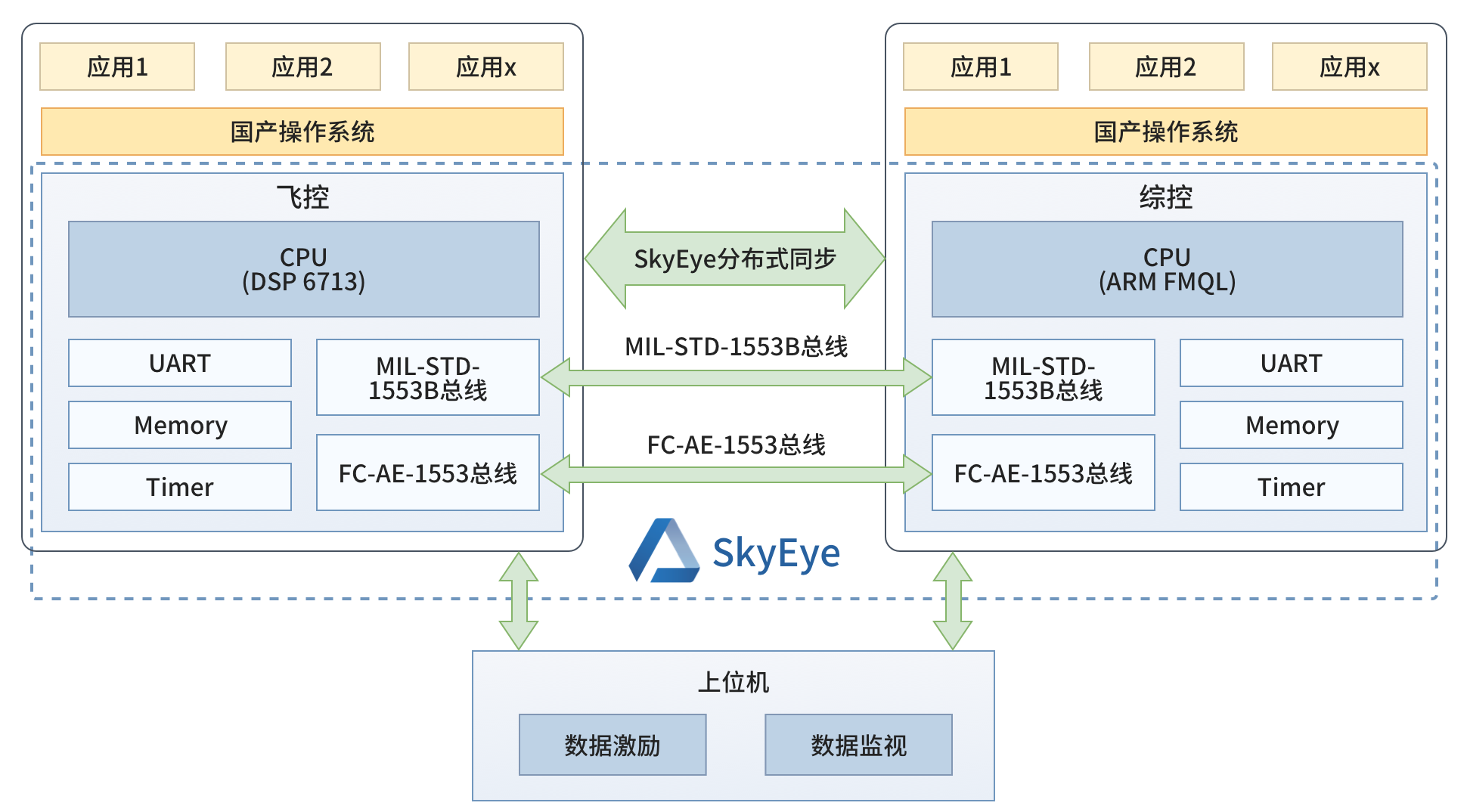
1.背景 现代飞行器系统中,飞行控制系统和综合控制系统的协同工作是实现精准打击和高度可靠性的关键。 飞行控制系统简称飞控系统,负责飞行器的飞行控制和姿态调整,确保飞行器在飞行过程中维持稳定和精确的轨迹。其主要进行姿态控制、轨迹调整、机动控制、状态检测等操作。 综合控制系统简称综控系统,是飞行器的核心控制模块,负责飞行器整体的任务管理和控制策略执行。其主要进行任务规划、导航与跟踪、数据决策

无人机 PX4 飞控 | ROS应用层开发:offboard 模式切换详细总结
无人机 PX4 飞控 | ROS应用层开发:offboard 模式切换详细总结 PX4 offboard 模式介绍通过mavros 进行offboard模式切换代码测试 通过地面站进行offboard模式切换通过遥控器拨杆切换offboard模式 PX4 offboard 模式介绍 PX4 是一个广为熟知的开源飞控软件,常用于无人机(UAV)和其它自主飞行器的控制。 在PX

无名创新开源飞控利用GPS数据航向对准开源代码
无名创新开源飞控利用GPS数据航向对准开源代码: #define acc_sync_cnt 5 void GPS_Azimuth_Update_Method1(uint8_t flag) { if(flag==0) return; //下面利用到角公式求解误差方位角,先方位角误差正切值 float x1=0,y1=0,x2=0,y2=0,molecule=0,denomi

飞控学习从入坑到放弃心路历程 ——————致敬无名小哥
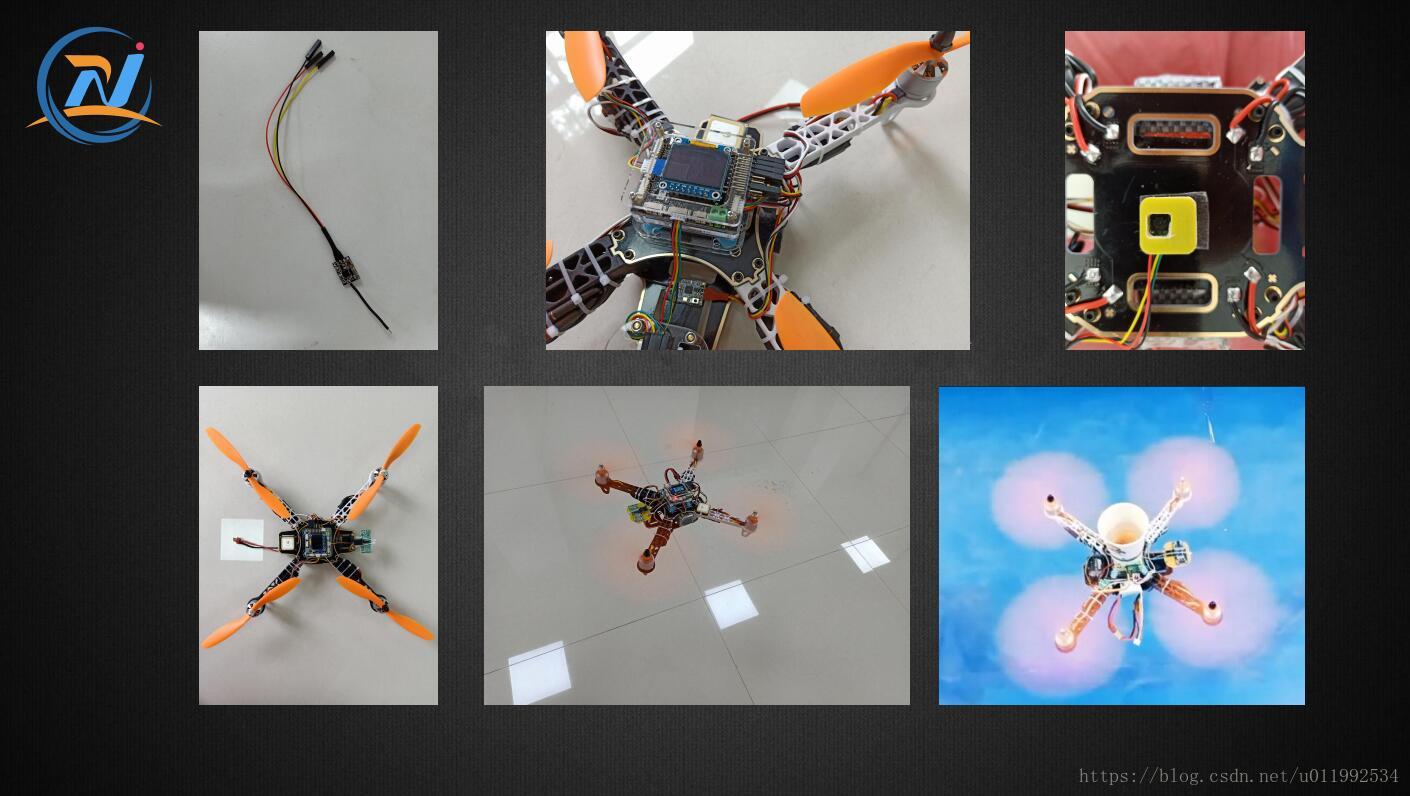
大一开始接触单片机,一个老乡带我进入的学校实验室,然后开始学习c语言,51单片机,做了一个蓝牙小车,大一暑假电赛老师做的高频题目,一脸懵逼,后面师兄建议我学习下32,我记得当时老师来了一句你明天是不是就要学64了,感觉当时很无语,(老师貌似喜欢做硬件的)还是一边玩一边学了下32,后面电赛测试的时候就没去了,因为什么都没做出来,也是当时才知道原来有无人机的控制题目可以选,但是老师并不同意我们
无名科创开源飞控公告
无名科创开源飞控公告 感谢您选择了无名科创,对飞控学习而言,国外商业级飞控APM、PX4/Pixhawk、Autoquad等平台不适合初学者入门学习。而国内传统飞控如Crazepony、ANO、Light、INF等随着创始者们相继毕业,工作时间紧,代码缺乏更新(涉密),以及技术支持不及时等,随着飞控整个行业的技术成熟,对从业者的要求越来越高,在国内开源飞控“青黄不接”的当下,我们无名科创团队成立
【STM32】飞控设计
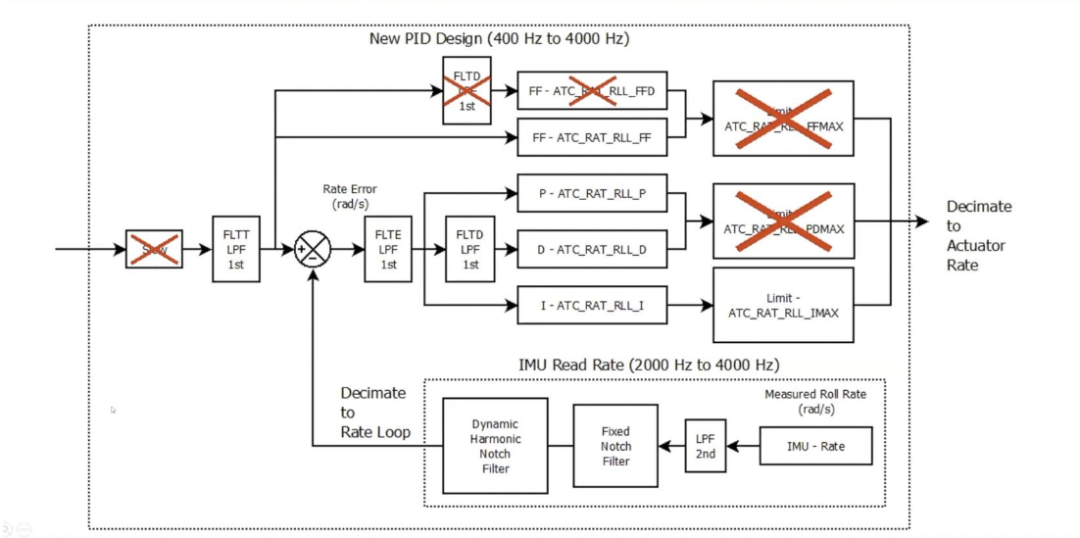
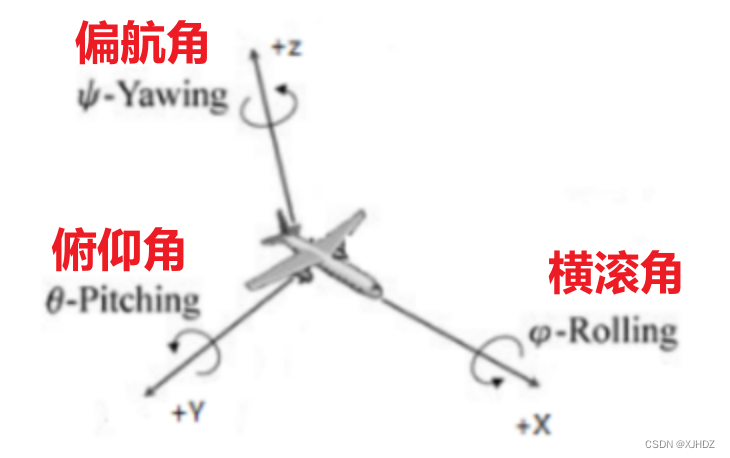
【一些入门知识】 1.飞行原理 【垂直运动】 当 mg>F1+F2+F3+F4,此时做下降加速飞行 当 mg<F1+F2+F3+F4,此时做升高加速飞行 当 mg=F1+F2+F3+F4 ,此时垂直上保持匀速飞行。 【偏航飞行】 ω 4 + ω 2 ≠ ω 1+ ω 3 就会产生水平旋转 【俯仰飞行】 当 F1+F4<F2+F3 向前
ArduPilot开源飞控之ROS系统简介
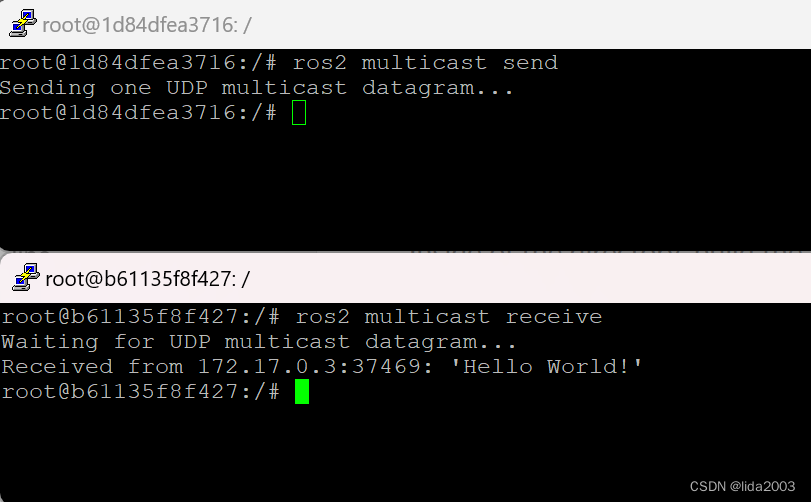
ArduPilot开源飞控之ROS系统简介 1. 源由2. ROS系统3. 安装2.1 安装Docker2.2 安装ROS2 4. 总结5. 补充资料 1. 源由 之前在ArduPilot开源飞控之硬件SBC分析中讨论过,个人角度最推荐其中两个系统是: Rpanion-server【推荐,简单】BlueOS【推荐,完备】ROS【专门讨论,开源/复杂】 从功能角度看BlueOS
ArduPilot开源飞控之lida2003套机+伴机电脑首飞
ArduPilot开源飞控之lida2003套机+伴机电脑首飞 1. 源由2. 问题3. 平台测试4. 功能测试5. 参考资料 1. 源由 最近由于一些琐事耽搁了伴机电脑上天的事情,今天总算是找补回来了。 主要的目的是,扩展Ardupilot的应用功能,侧重图像识别环节的应用。 ArduPilot开源代码之CompanionComputer上天计划ArduPilot开源飞控之
无人机/飞控--ArduPilot、PX4学习记录(4)
这是一篇碎碎念,零零碎碎的记录了小组准备竞赛的过程,写的挺乱,仅供本人记录学习历程和参考。 本章主要完成的目标:调试地面站 GPS、加速度校准;试飞并炸机 目录 地面站(QGC)安装(*未完成) 地面站Mission Planner 1.3.60安装: 飞控与地面站连接、校准 遥控器对频 连接四个螺旋桨 >在前几篇博客中我只是安装好了python3.8,但是并没有将
【飞控调试】无人机电调哔-哔-哔-哔-哔...发出急促的响声
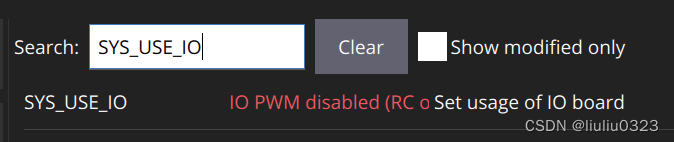
硬件 飞控:Pixhawk 6C mini 电调:好盈hobbywing Platinum 40A 固件:PX4 V1.13.3 问题 电调上电后,电机发出哔-哔-哔-哔-哔…发出急促的响声,进行电调校准也没用。 解决 在QGC里把SYS_USE_IO参数改成Disabled,然后重新上电,重新校准,即可。
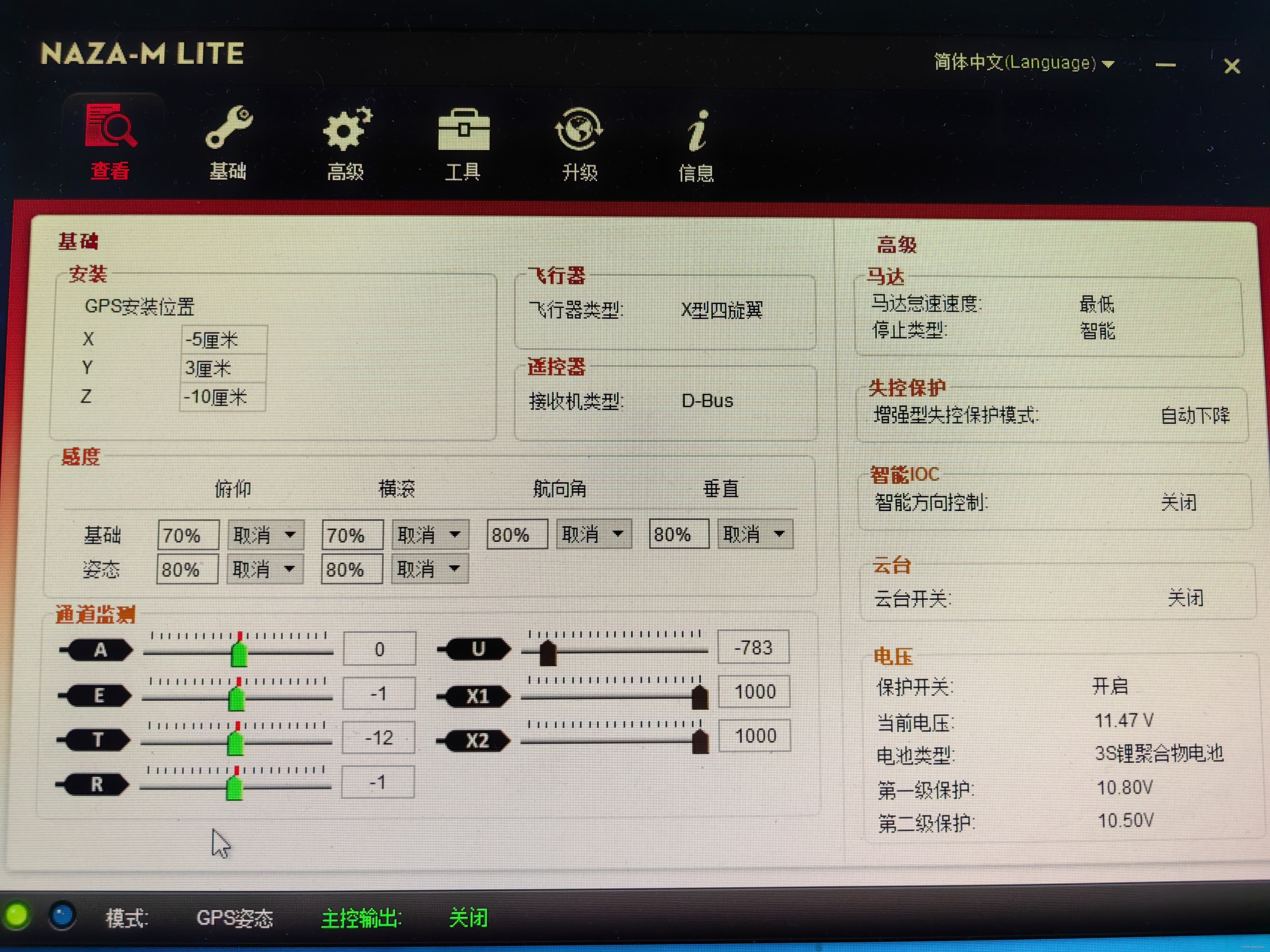
大疆NAZA飞控使用乐迪T8起飞偏转疑难解决
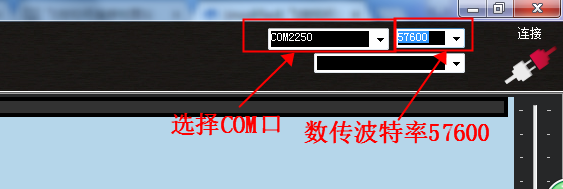
遥控器微调已经到头还是偏转怎么办?调试软件也显示 不居中 此时,需要调试遥控器,以乐迪为例。 先安装官网下载的驱动 识别出现340端口 选择串口,比特率,点击打开 方向调整信道4,起飞偏左则加大中点值。 再次调整测试遥控,确保微调有余量 退出连接地面站验证。

(转载)1. 飞控与无人机系统
1. 飞控与无人机系统 Tam Alex 原帖地址:https://zhuanlan.zhihu.com/p/32306372 终于开始写第一篇文字了,实在是太懒了,希望以后能抓紧时间。这第一篇文字呢,就讲一讲这个专栏要讨论哪些内容吧。 这个专栏的初衷是要总结和记录一下自己这些年的工作的,实际上我这些年在做的是基于C/C++的与平台无关的飞行状态估计及飞行控制算法库的开发。那么这部分

DJI A3飞控 遥控器信号中断 会导致什么问题?
DJI A3飞控 遥控器信号中断 会导致什么问题? 在使用DJI A3 飞控的过程中,希望用OSDK完成自动化的任务。 DJI A3要求必须连接遥控器,可以是大疆Lightbridge的遥控器,也可以是SBUS协议的遥控器,比如航模的支持SBUS协议的遥控器即可。 当运行OSDK的过程中,遥控器出现问题,或者遥控器的信号出现干扰,导致出现连接问题时,此时飞行器的执行动作将会怎样

正点原子STM32F405RG飞控 二层板低成本(原理图+PCB+程序)
正点原子STM32F405RG飞控 二层板低成本(原理图+PCB+程序) www.cirmall.com/circuit/18606
记录学习crazepony飞控
记录学习crazepony 开始之前,弱弱的问一句:大佬们你们是怎么学习飞控的呢?如何抓住核心?函数来回调,变量在你不知道的地方悄悄改变着。如何才能清晰的知道如何理顺思路,找到要点,比如修改一下默认的悬停高度。恳请赐教。QQ:2922846226 (邮箱同上),感激万分! 注:本文完全作为个人学习记录用,个人理解难免出错,不敢作为学习参考,若您发现错误还恳请联系指出,再次感谢。共同进步。 先
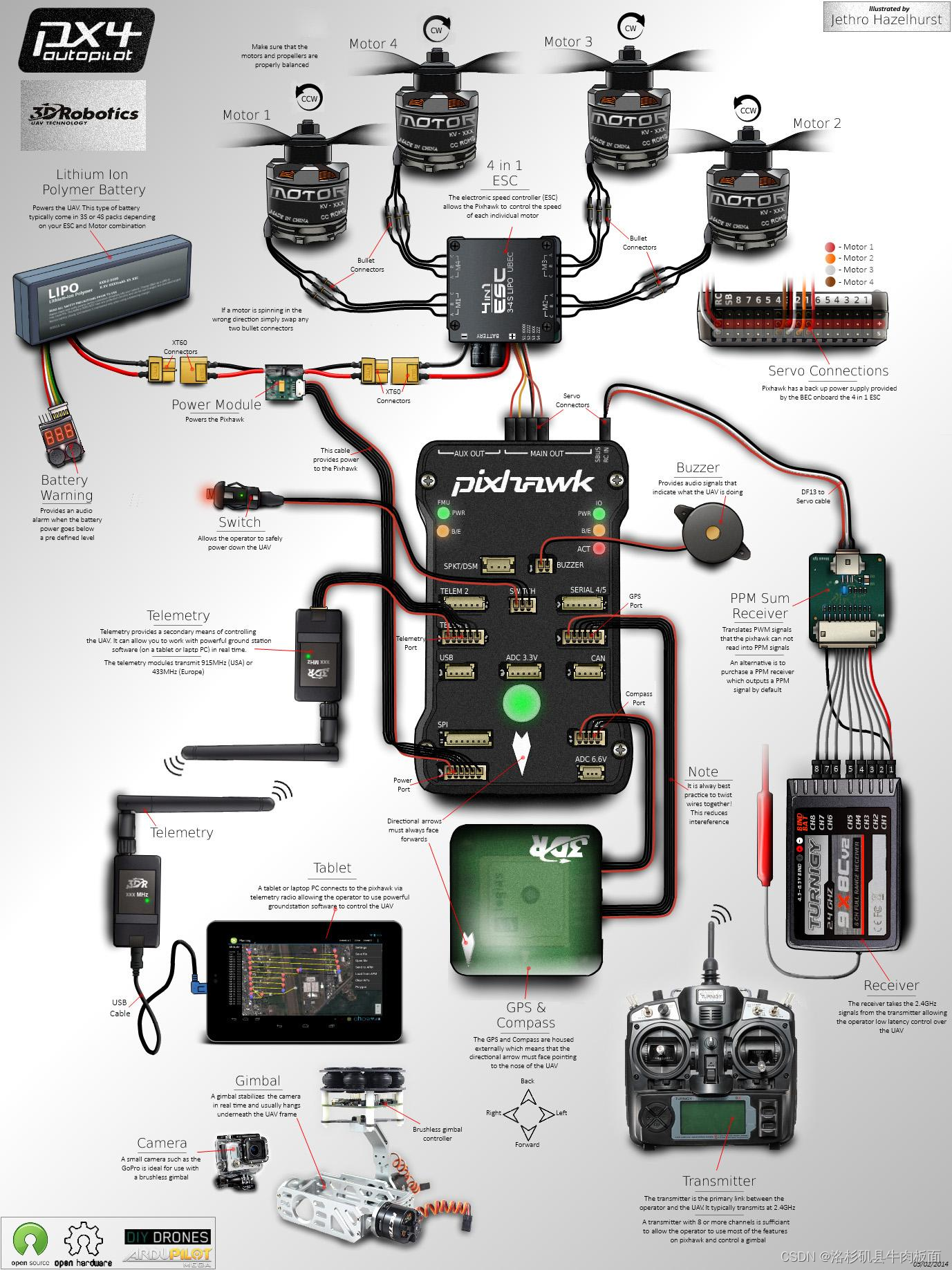
图文并茂详细教程之-- 用pixhawk飞控组装一台F450四轴无人机(下)
摘自:https://mp.weixin.qq.com/s/1vXfYPgaQEkXLfpSnjJqAw 图文并茂详细教程之-- 用pixhawk飞控组装一台F450四轴无人机(下) CJKK 苍穹四轴DIY 2019-11-15 第八步 失控保护设置 PIX 的失控保护是通过 故障保护 菜单配置的,点击 初始设置->必要硬件->故障保护,如下所示: 首先明确飞控有几

开源飞控ACFLY:ADRC安排过渡过程
摘自:https://blog.csdn.net/weixin_40767422/article/details/87651614 开源飞控ACFLY:ADRC安排过渡过程 置顶 ACFLY开源飞控 2019-02-24 13:05:39 3466 收藏 13 分类专栏: ADRC自抗扰控制 文章标签: ADRC 自抗扰控制 过渡过程 ACFLY 跟踪微分器 版权

开源飞控ACFLY:ADRC离散系统最速控制综合函数的理解
摘自:https://blog.csdn.net/weixin_40767422/article/details/86709848 ACFLY原创文章,转载请说明出处https://blog.csdn.net/weixin_40767422/article/details/86709848 ADRC相关论文资料请加q群:180319060下载 最近在看韩京清教授的自抗扰论文,里面关于最速

《多旋翼无人飞行器嵌入式飞控开发指南》里面也是基于FreeRTOS开发飞控,这也目前已经至少有三个用FreeRTOS开发飞控的,正点原子,ACfly,PX4/APM也是基于操作系统
《多旋翼无人飞行器嵌入式飞控开发指南》里面也是基于FreeRTOS开发飞控,这也目前已经至少有三个用FreeRTOS开发飞控的,正点原子,ACfly,而且还知道crazypony也在想把飞控移到FreeRTOS上。刚刚发现一个基于UCOS写飞控的书。然后PX4/APM不也是基于操作系统来开发的么,用的NUTTX操作系统!!!也有进程间通信!!!!还有人把PX4的操作系统替换为FreeRTOS,更加

无名的飞控默认是用的PID,没用ADRC,可以改变宏定义切换。而且只在角速度环用ADRC。
看了下代码,默认是PID模式,所以实际那飞的效果是PID。 而且从它这宏定义看书,无名只是把ADRC用在角速度环上面,角速度环的控制可以用ADRC或者PID。 我是怎么一步步找到那的呢,先找到main.c 这里说 主要核心:传感器滤波、姿态解算、惯导、控制等代码在TIME.c里面运行 那就找到time.c 可以看到最关键的一段,把整个控制算法都

Ardupilot飞控Mavlink代码学习
摘自:https://blog.csdn.net/lixiaoweimashixiao/article/details/80919995 Ardupilot飞控Mavlink代码学习 魔城烟雨 2018-07-05 23:36:33 4302 收藏 19 分类专栏: ardupilot学习 版权 目录 目录摘要1.Ardupilot怎么实现Mavlink初始化2.M
px4开源飞控uORB学习笔记
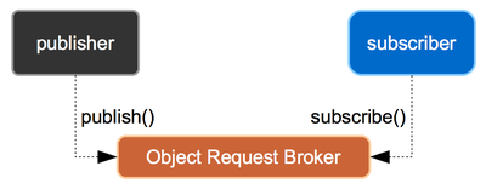
这下面最重要的我觉得是这个图 摘自:https://www.cnblogs.com/kinson/p/12108591.html px4开源飞控uORB学习笔记 1、uORB是什么,起什么作用? uORB(Micro Object Request Broker,微对象请求代理器)是PX4/Pixhawk系统中非常重要且关键的一个模块,它肩负了整个系统的数据传输任务,所有的传感器数据、

XTDrone也是主要利用offborad模式,板载计算机给飞控发送期望运动
https://www.yuque.com/xtdrone/manual_cn/vehicle_config https://blog.csdn.net/sinat_16643223/article/details/114042279 。