本文主要是介绍无人机/飞控--ArduPilot、PX4学习记录(4),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
这是一篇碎碎念,零零碎碎的记录了小组准备竞赛的过程,写的挺乱,仅供本人记录学习历程和参考。
本章主要完成的目标:调试地面站 GPS、加速度校准;试飞并炸机
目录
地面站(QGC)安装(*未完成)
地面站Mission Planner 1.3.60安装:
飞控与地面站连接、校准
遥控器对频
连接四个螺旋桨
>在前几篇博客中我只是安装好了python3.8,但是并没有将python3.8设置为默认版本。
在命令行中输入python --version,仍然显示我的python默认使用版本为python3.6,于是我对现拥有的python版本优先级进行了设置。
1 是分配给Python 3.8的优先级:
sudo update-alternatives --install /usr/bin/python python /usr/bin/python3.8 1之后,使用以下命令来配置默认的Python版本,这将显示一个菜单,列出可用的Python版本以及它们的优先级。选择Python 3.8对应的编号,并按Enter键确认。将它的优先级设置为最高:
sudo update-alternatives --config python星号设置在python3.8之前:
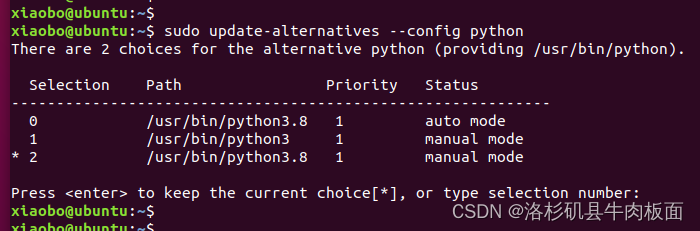
设置完成后,进行检验:
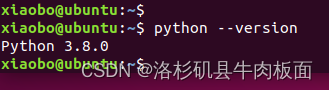
返回的默认python版本为3.8,设置成功。
地面站(QGC)安装(*未完成)
Download and Install | QGC Guide (master) (qgroundcontrol.com)
按照官网给出的步骤,选择Ubuntu Linux系统,一步一步来。
我还找到了2篇将安装步骤写的很详细的博客:
linux系统下安装QGC地面站(Ubuntu18.04版本)_ubuntu18.04安装qgc-CSDN博客
ubuntu18.04下QGC安装_ubuntu安装qgc-CSDN博客
先查查自己ubuntu的版本
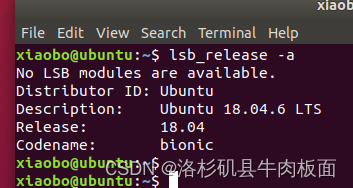
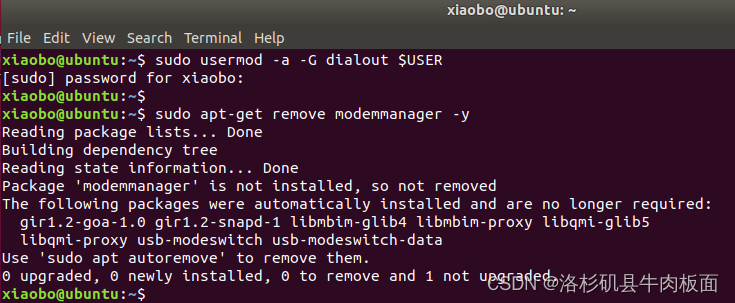
>首先在终端复制粘贴此命令:
sudo usermod -a -G dialout $USER
sudo apt-get remove modemmanager -y
sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -y
sudo apt install libfuse2 -y
sudo apt install libxcb-xinerama0 libxkbcommon-x11-0 libxcb-cursor0 -y输入命令后的结果:
然后在ubuntu系统中下载QGC.AppImage,下载完成:
将它移动到主文件目录之下:
添加权限: 此时没有回应就是最好的回应
安装完成之后,出现了问题,原因是因为我的ubuntu版本过低,与QGC目前提供的版本不兼容,缺少libm.so.6 和 libstdc++.so.6:
/tmp/.mount_QGrounW8MDEo/QGroundControl: /lib/x86_64-linux-gnu/libm.so.6: version `GLIBC_2.29' not found (required by /tmp/.mount_QGrounW8MDEo/QGroundControl)
/tmp/.mount_QGrounW8MDEo/QGroundControl: /usr/lib/x86_64-linux-gnu/libstdc++.so.6: version `GLIBCXX_3.4.26' not found (required by /tmp/.mount_QGrounW8MDEo/QGroundControl)问了问温馨一言,它建议我不要手动升级libstdc++6,有风险:

于是 更换QGC版本,使用v4.0版本:
先更新TLS库:
安装QGC所需要的依赖:

最终我没有在ubuntu上完成QGC旧版本的安装。更换方案,选用mission planner。
地面站Mission Planner 1.3.60安装:
不用ubuntu安装地面站,现在更换为windows系统。
安装1.3.60版本,安装网址:ArduPilot firmware : /Tools/MissionPlanner/archive

安装: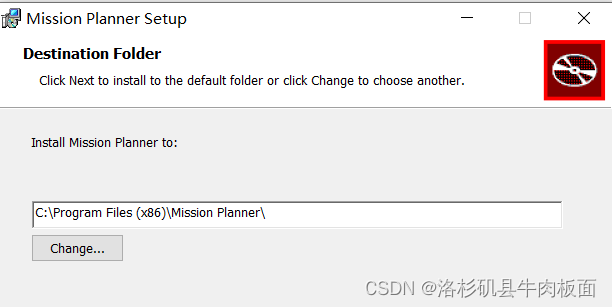
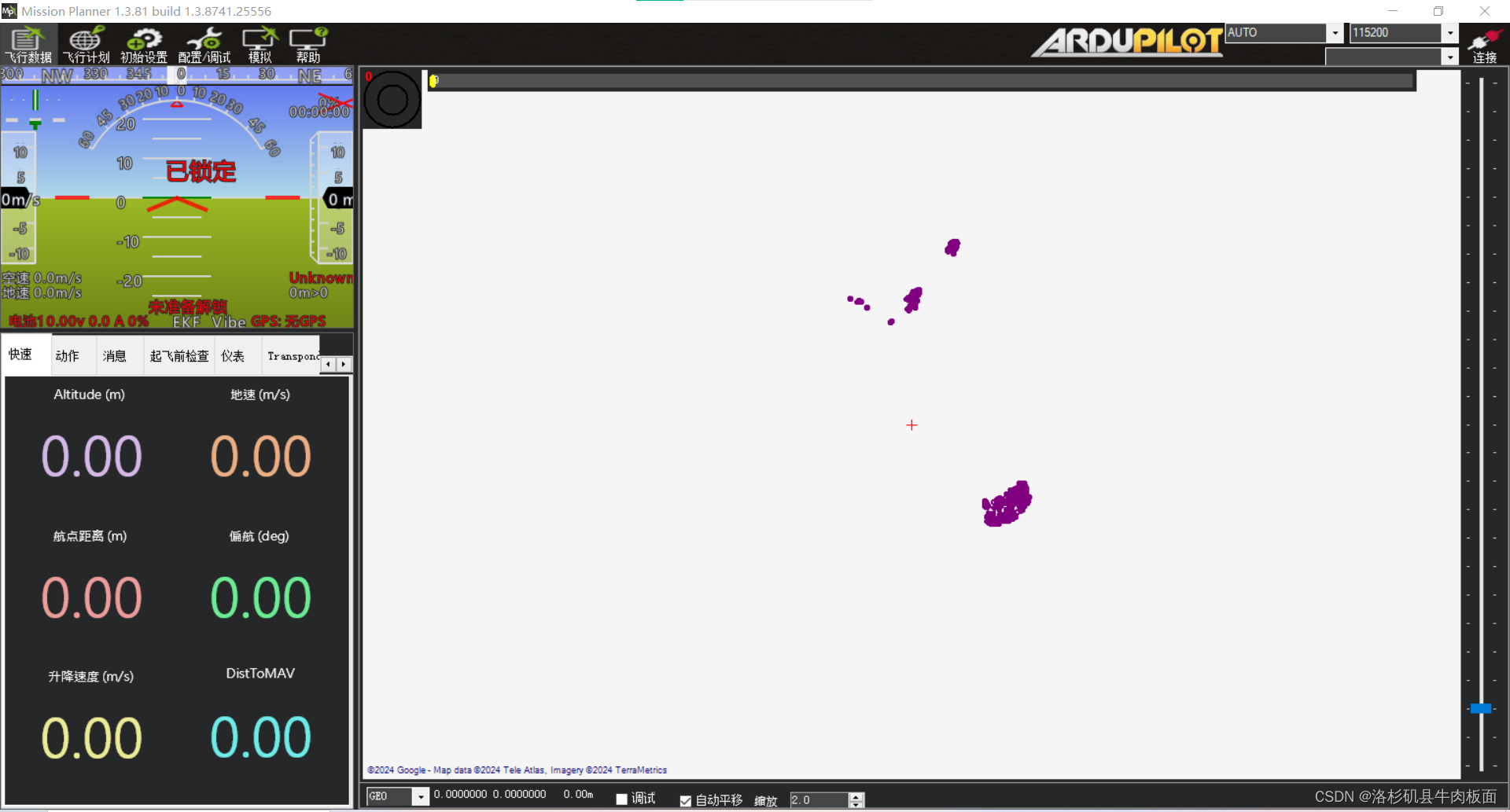
安装完成,打开之后的初始界面是这样,没有地图,光秃秃的:
想要导入地图,就打开“飞行计划”->右侧拉栏->必应混合地图:
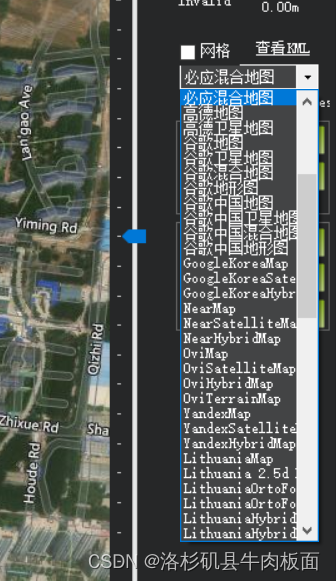
地图就会被加载出来。
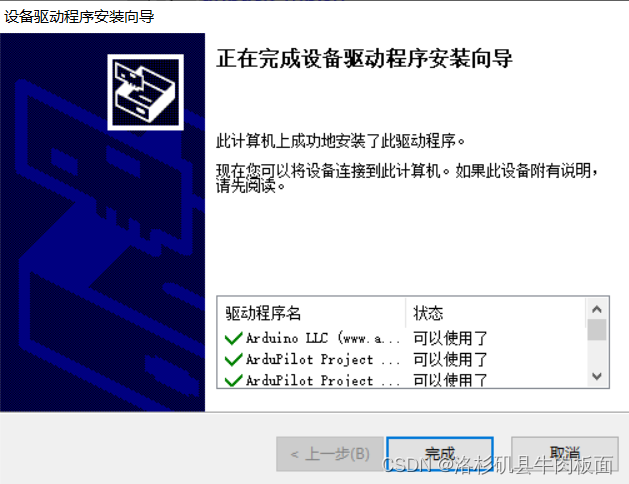
检验一下,设备管理器中存在驱动程序,mission planner可以正常运行:
飞控与地面站连接、校准
我们购买的是pixhawk2.4.8。具体的连接、校准教程看这里:
调试前,务必阅读 · GitBook
>使用USB线连接电脑与飞控,连接成功后LED灯会常亮黄光,蜂鸣器会响几声(我没抓拍到黄色LED灯,实际上是有的):
在电脑上,蓝牙显示连接成功:
>接下来打开mission planner,在右上角选择COMx,我这里是COM3,右侧的一栏数据是波特率,默认115200.

>升级一下固件。
升级到5.0了:
>接下来,点击右上侧的连接,连接飞控:
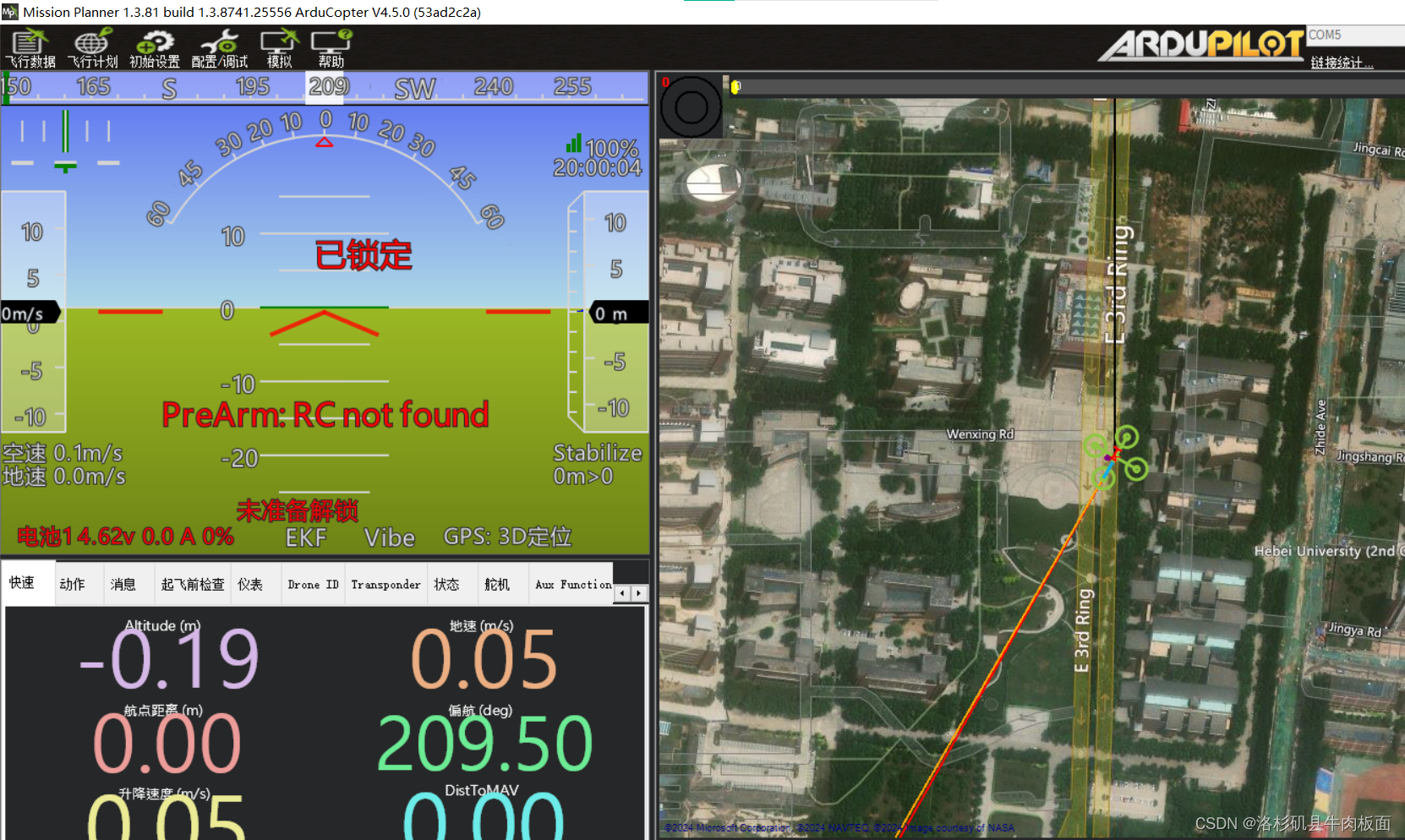
连接成功,此时可以看到 GPS以及加速度没有被校准,水平线是歪的,所以接下来需要校准:

校准
校准GPS,只使用外部罗盘:

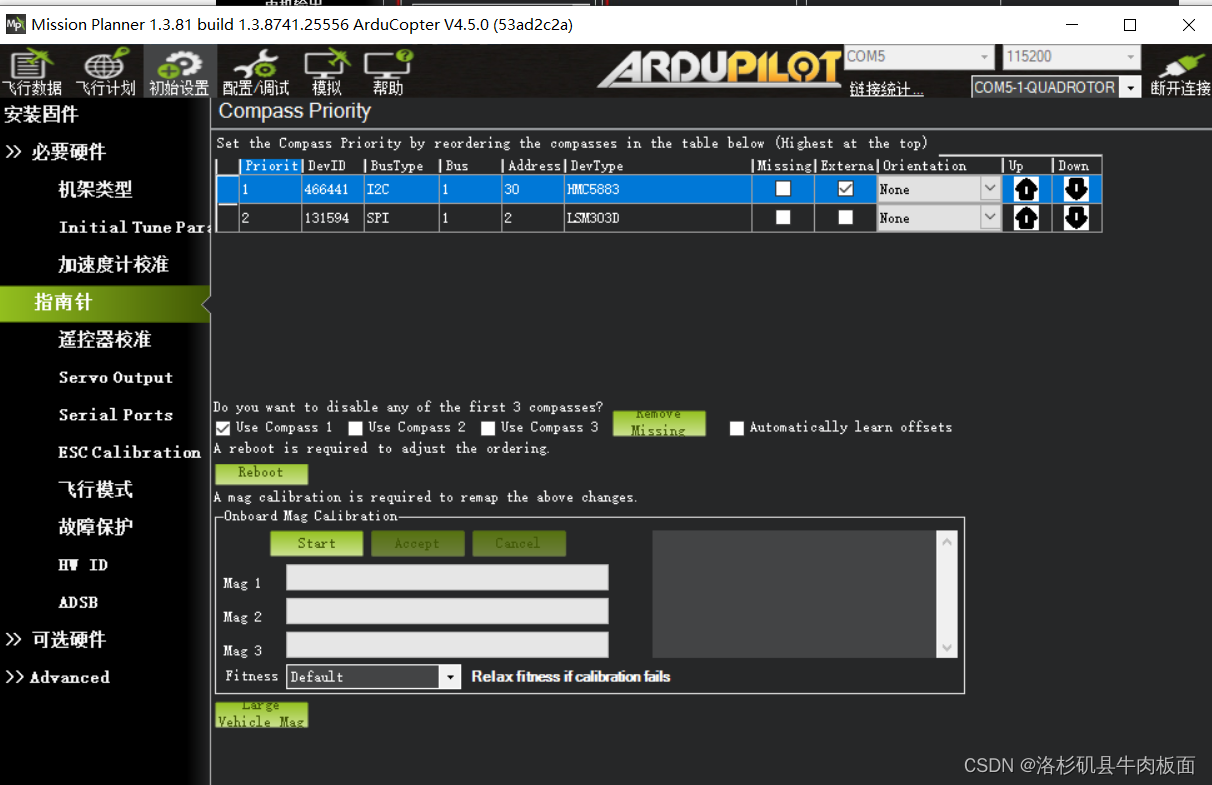
点击Start,举起无人机,做各种方向的校准,一直到绿色的进度条拉满。
校准成功:
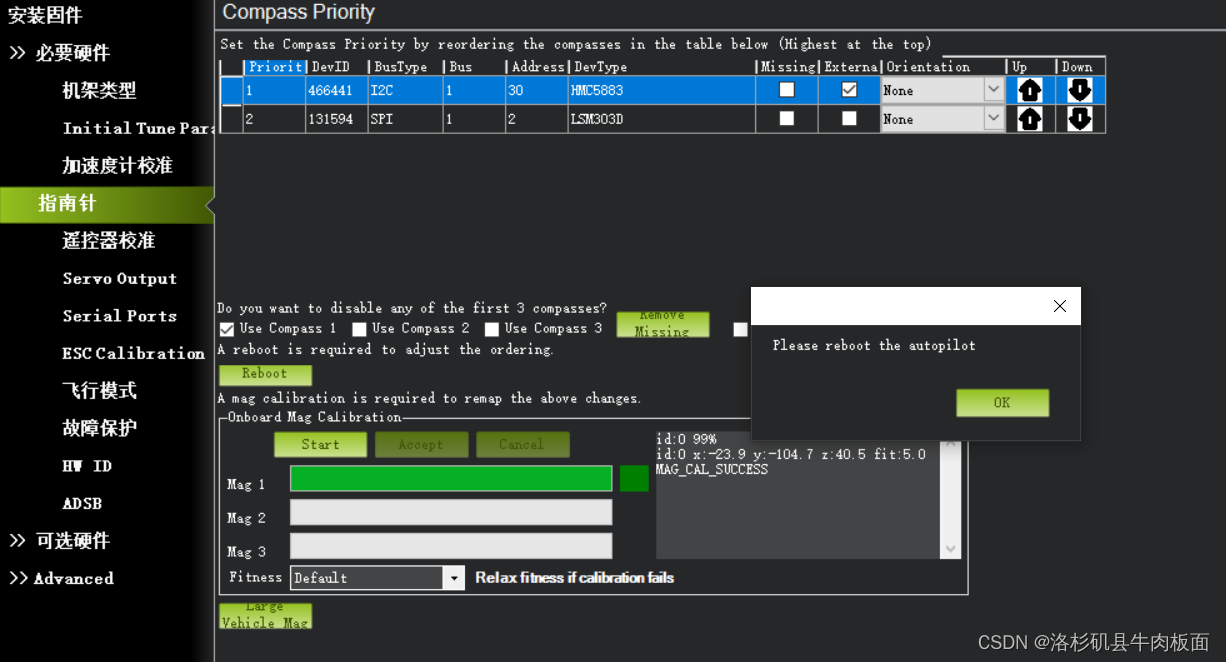
后来发现,GPS在室内校准的并不准确,于是搬着设备去室外重新校准,这次还加上了内置罗盘;再重新进行一次校准。 内外校准成功: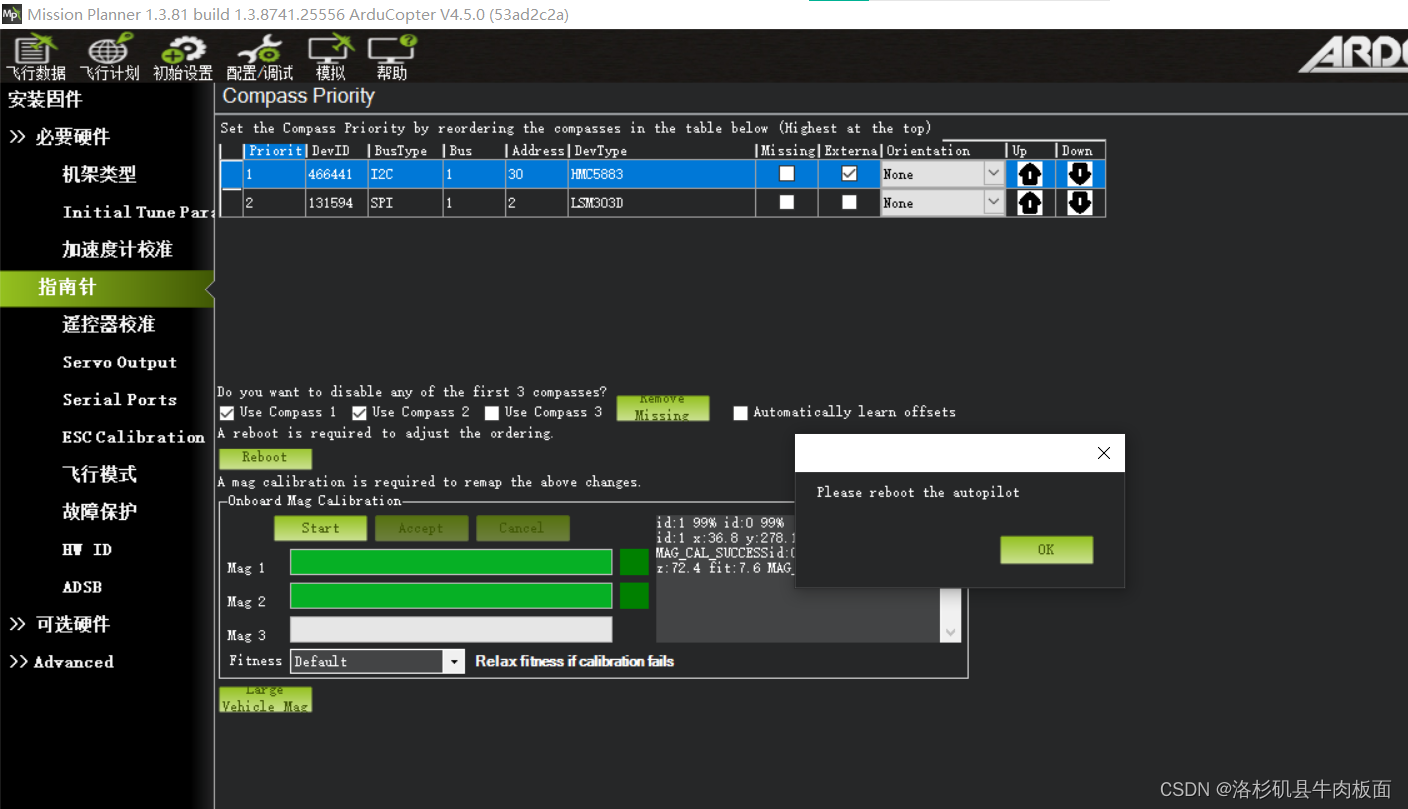
加速度校准完成:
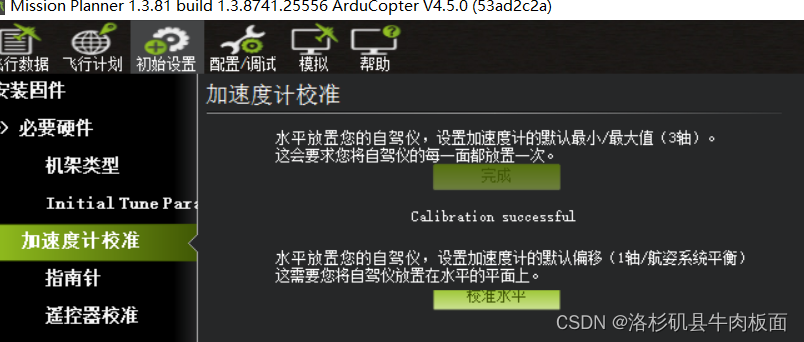
现在的状态为:GPS和加速度校准完成,打开“飞行数据”界面,可以看到此时的仪表角度是水平的,右侧的地图也正确的显示了我当前的位置:
遥控器对频
遥控器使用:富斯i6 10通道,接收机使用:IA10B 10通道。

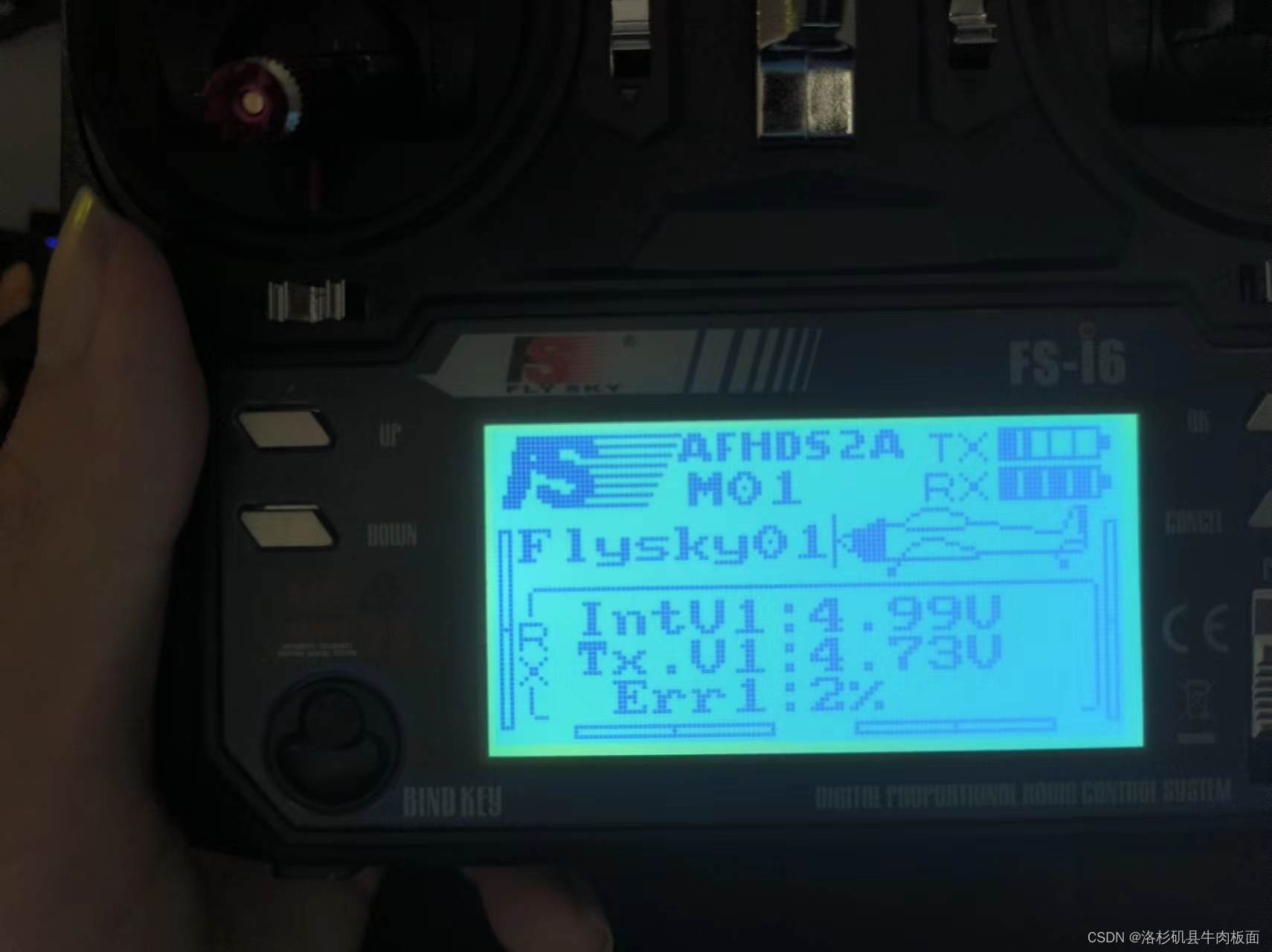

对频成功
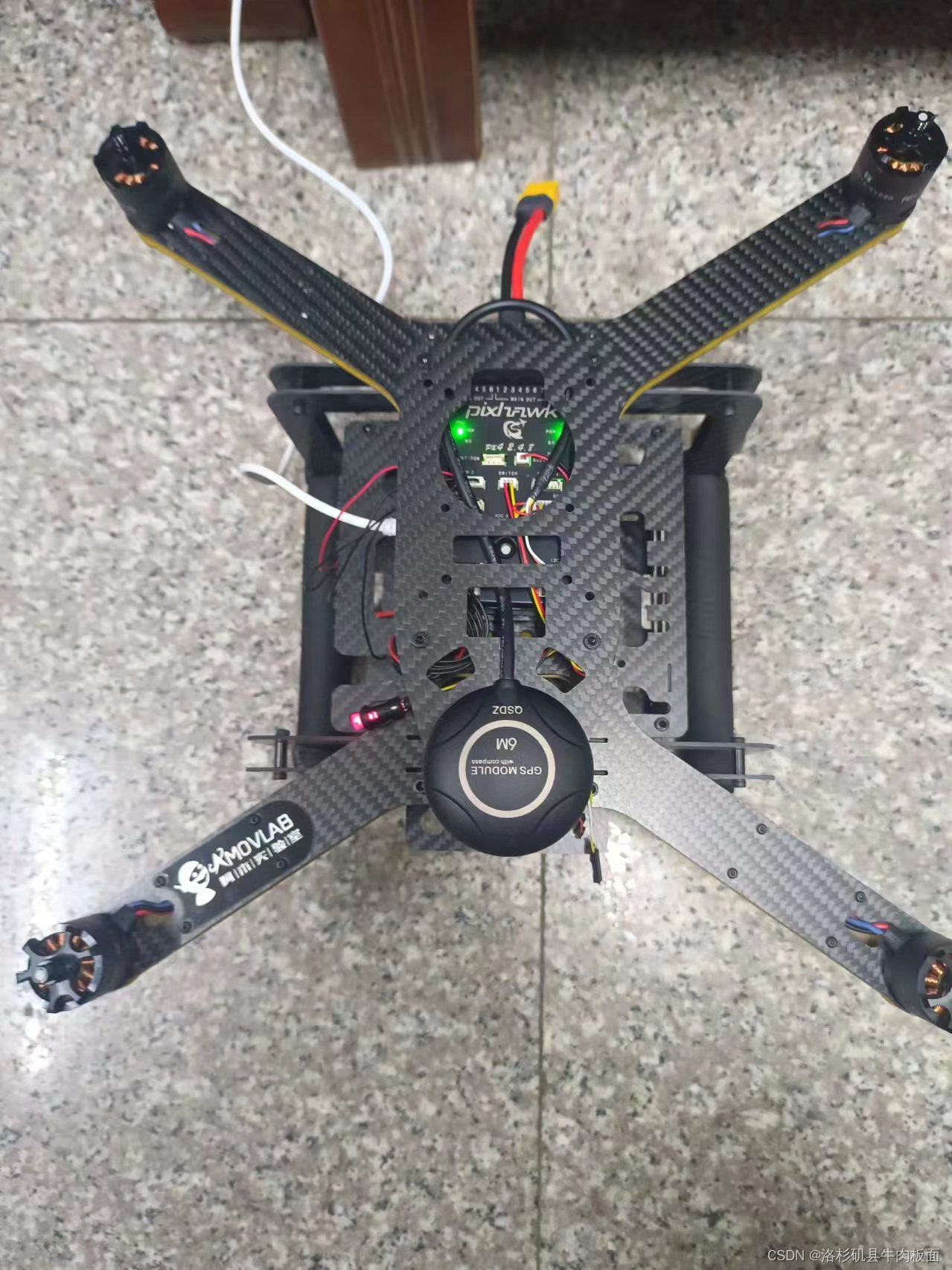
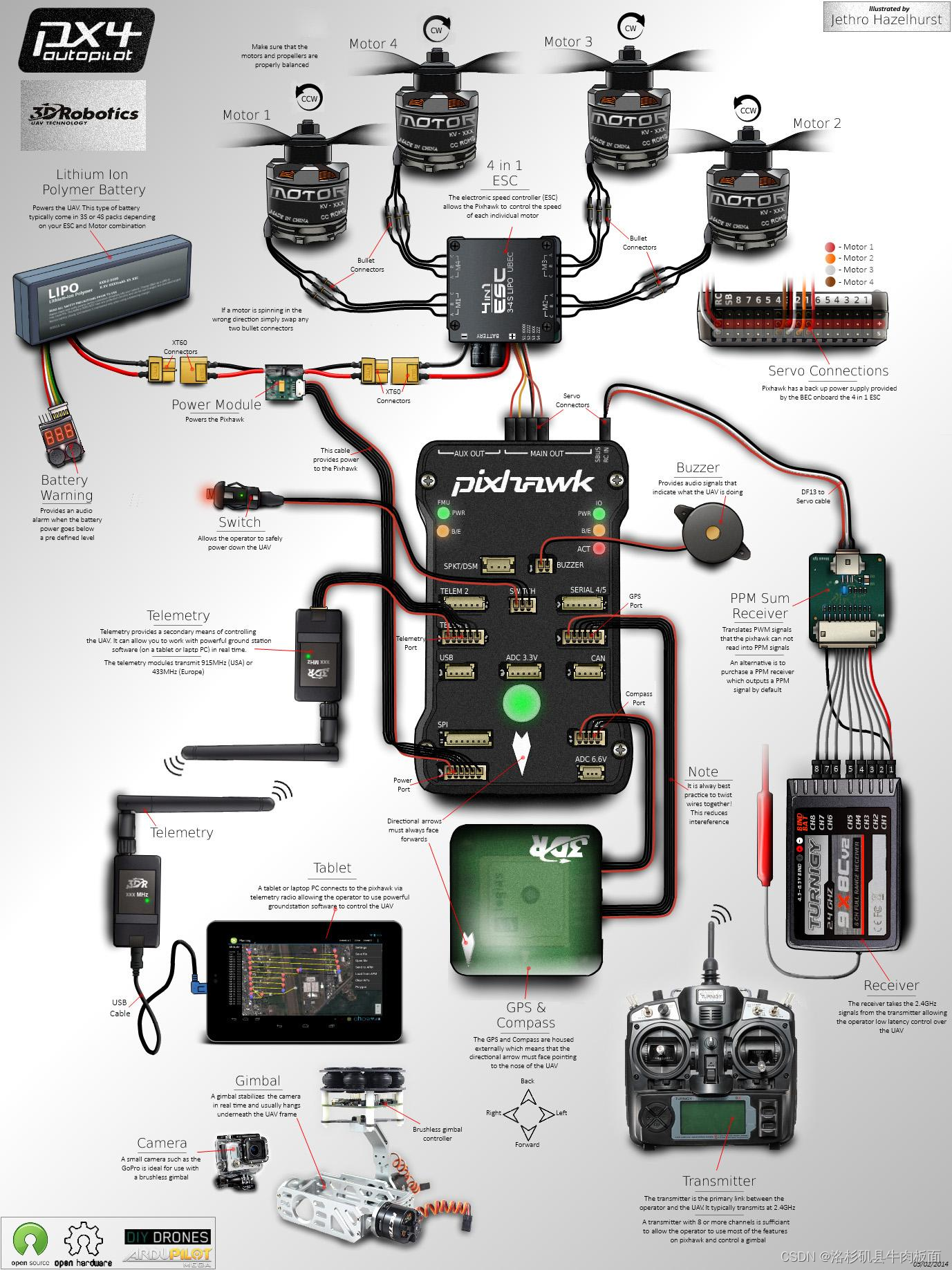
连接四个螺旋桨
首先要理清四个旋翼的发动机的转向和标号,官网给的机架参考:
机架参考 ·PX4 用户指南
我们小组使用的是四旋翼x型号无人机。

搜罗到一张图,觉得蛮有用:(Note: The image above is from 3DR.)
接线和拼装部分都是组长完成的。
2024年4月6日 第一次试飞,以炸机告终。
这篇关于无人机/飞控--ArduPilot、PX4学习记录(4)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






