本文主要是介绍Ardupilot开源代码之Rover上路计划,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Ardupilot开源代码之Rover上路计划
- 1. 源由
- 2. 思路
- 3. 计划
- 3.1 底盘
- 3.1.1 底盘架子
- 3.1.2 电机参数
- 3.1.3 编码器参数
- 3.1.4 舵机参数
- 3.2 电子部件
- 3.2.1 有刷电调
- 3.2.2 APM飞控
- 3.3 系统框图
- 5. 参考资料
1. 源由
最近研究点无人机的东西,注意不是穿越机。个人感觉穿越机和无人机最大的不同就是定位的目标人群差异。
有点感觉像买车的时候,有人买Toyota GR86,而有的人去买了沃尔沃S60。一个奔着情怀,操控;一个奔着安全、舒适。而穿越机就感觉是奔着操控;无人机更多的是安全、舒适。
显然,从穿越机往无人机方向转进,存在一个至关重要的问题:安全性。
车子要出问题,可以直接踩下刹车,飞机在天空中可没有刹车,刹停就掉下来了。本着安全的原则,打算先入手一台Rover来尝试下无人车。
当然,本着DIY的精神,绝对不去买成品,折腾而且要性价比高,那么妥妥的上高大上的东西ArduRover。
注:其实最简单的遥控无人车,压根就不需要飞控,只要接收机+电机+Servo车就能开的。
2. 思路
不管ArduRover多么高大山,从资料的角度来说,并不会复杂。因为网上妥妥的官方指南《ArduPilot Rover》。
因为,这个是整个世界基于互联网的经验,反正我愣是没有看明白。说穿了就是不知道买回来一堆东西,到底能不能用,怎么用不知道。
有了一些开源代码功底,依然没有搞明白;外加口袋的情况,凡事总是要有了头绪以后才能入手。
- BetaFlight开源代码框架简介
- PX4开源软件框架简明简介
- ArduPilot开源飞控系统之简单介绍
- iNav开源代码之研读分析篇章目录梳理
所以打算向大佬们学习、请教:
- Are these motors compatible with ArduRover 4.5?
- How to select and configure ESC/Motor for ArduRover?
显然出现了些问题:大佬们不认识中文字,哈哈!但是还是非常认真的,只要我们的问题正确!
3. 计划
既然,逻辑上,整个ArduRover已经清楚了,接下来的事情就相对简单,整理如下清单:
3.1 底盘
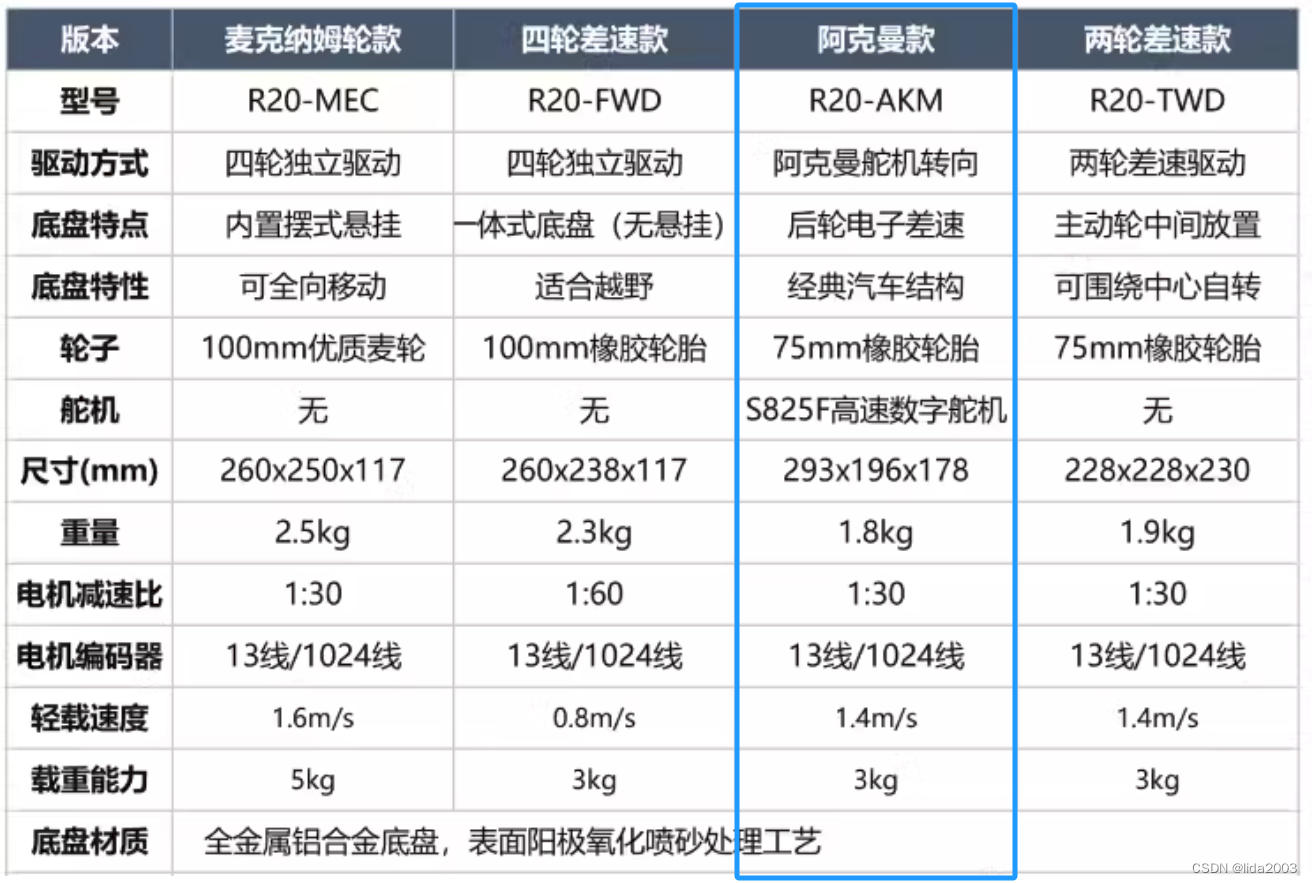
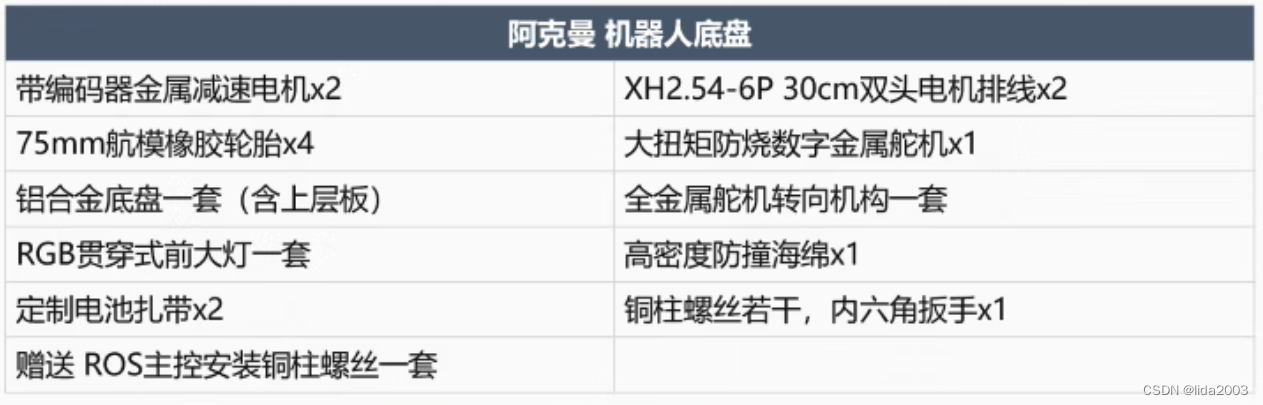
3.1.1 底盘架子

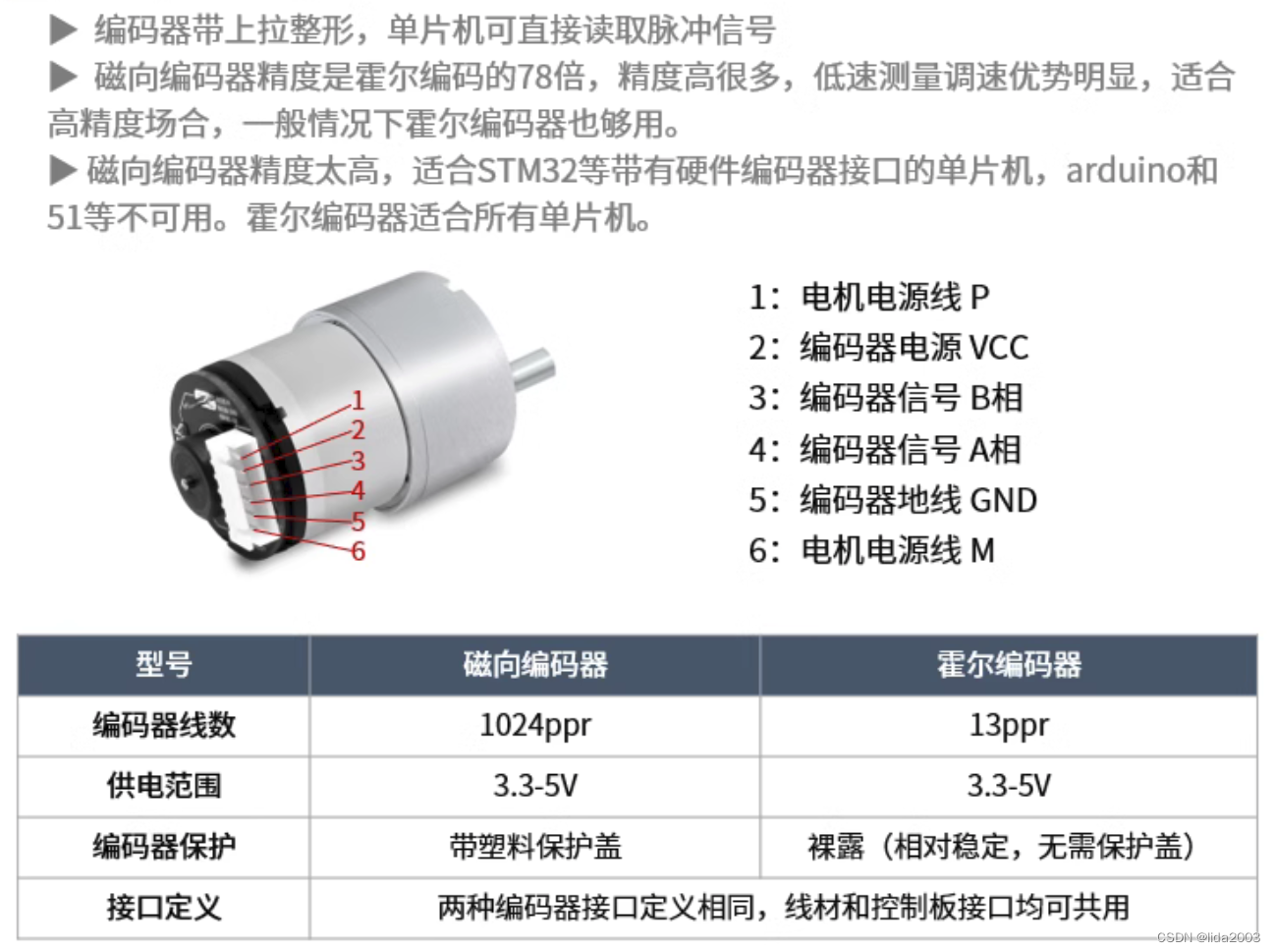
3.1.2 电机参数

3.1.3 编码器参数
3.1.4 舵机参数

3.2 电子部件
- 飞控:支持Ardupilot
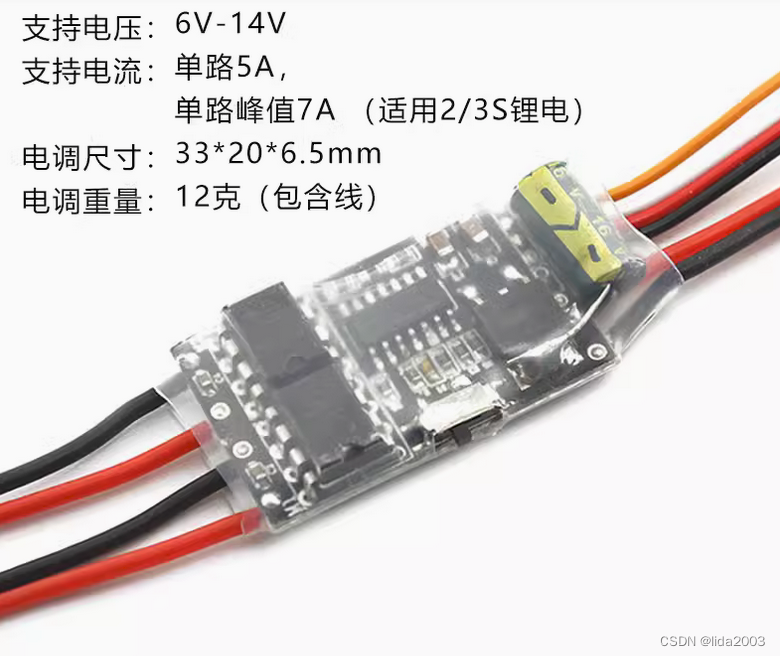
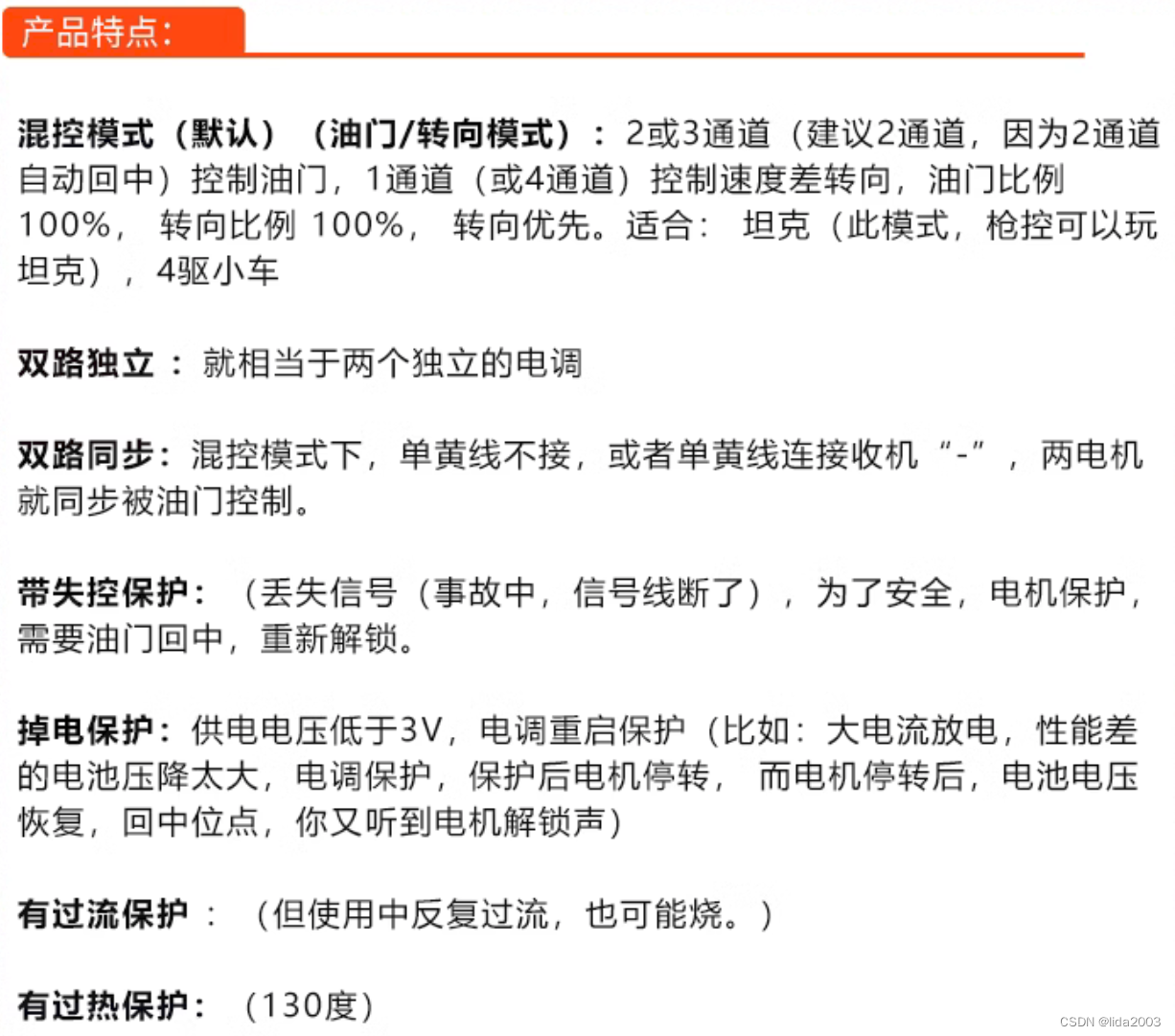
- 有刷电调:支持2S~3S;双路双向;可独立控制;
- FPV摄像头:Foxeer Micro Toothless 2 FOV Switchable FPV StarLight Camera 1/2" Sensor Super HDR
- 模拟图传:PandaRC VT5804M L1 (Buzzer/Mic/IRC Protocol) 5.8G
- 遥控接收机:ELRS915MHz接收机
- 遥控发射机:ELRS915MHz发射机
- 遥控器:TX12 Mark II Radio Controller
- 图像接收机:Foxeer Wildfire 5.8GHz 72CH Dual Receiver
- 眼镜:Fatshark FPV Goggles
- GPS:BN880
- 高清摄像头:Raspberry Pi OV5647
- 伴机电脑:Raspberry Pi 3B+
- 地面站:Redmi Note 5A
- 动力电池:3S Lipo Battery 11.1 V 2200MAH 30C
- 机载UPS:Li-ion Battery HAT for Raspberry Pi
相对于四轴无人机来说,不太一样的,我们重点上图说明一下:
3.2.1 有刷电调

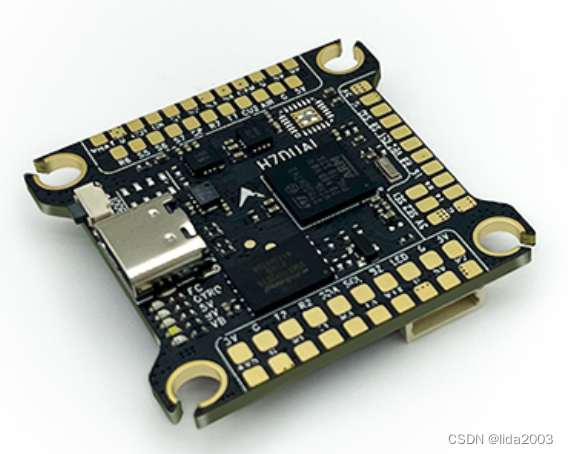
3.2.2 APM飞控
-
Aocoda-RC H743Dual
-
KAKUTE F7 AIO

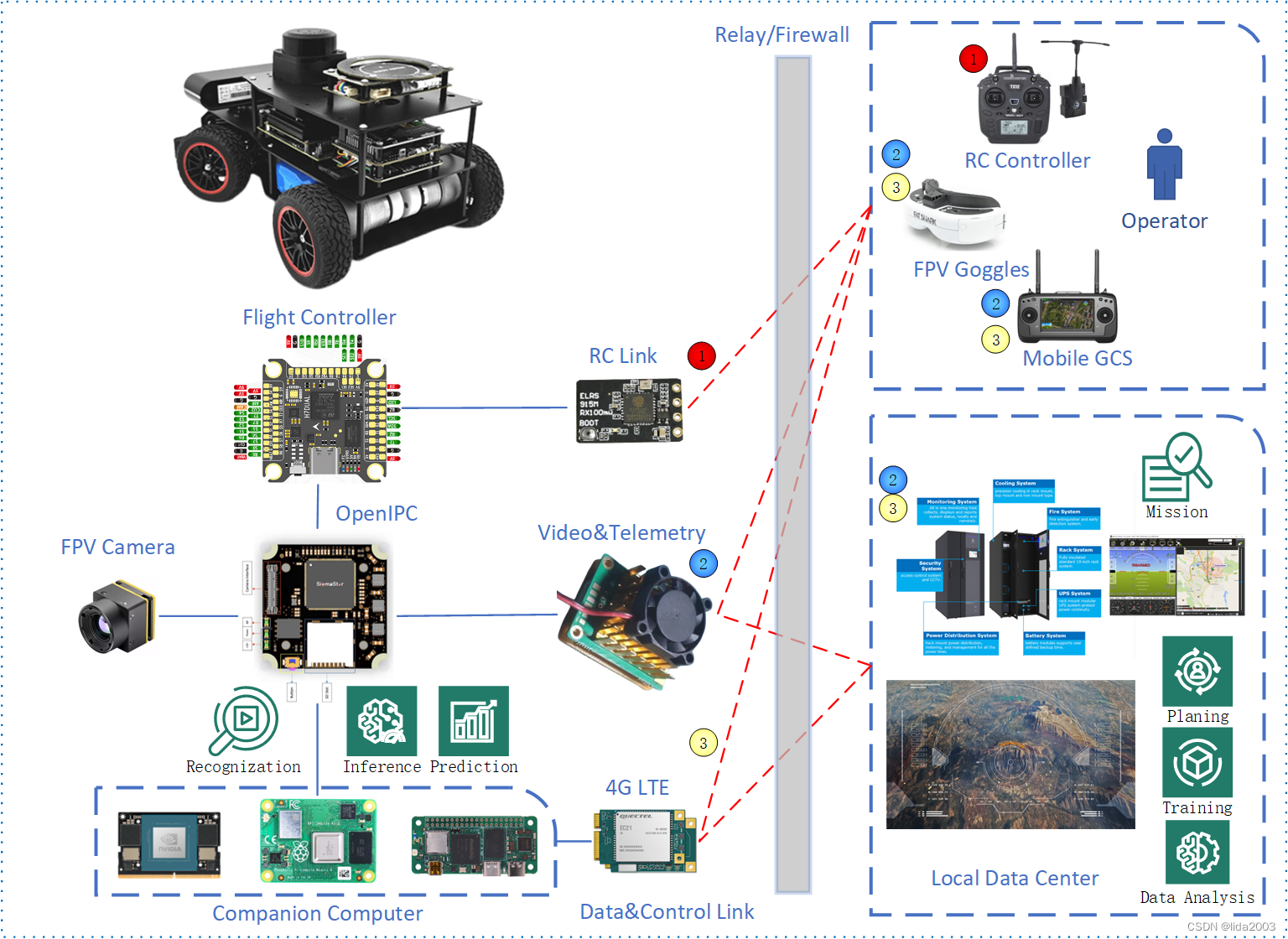
3.3 系统框图
注:期望能够把最近这套OpenIPC给整合进去,如果能拿到4GLTE的模块,就一起整活!!!
5. 参考资料
【1】ArduPilot开源代码之CompanionComputer上天计划
【2】Ardupilot & OpenIPC & 基于WFB-NG构架分析和数据链路思考
【3】ArduPilot开源飞控之lida2003套机+伴机电脑首飞
这篇关于Ardupilot开源代码之Rover上路计划的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








![[置顶] 2014训练计划进阶版](/front/images/it_default.gif)