rover专题
Ardupilot开源代码之Rover上路 - 后续1
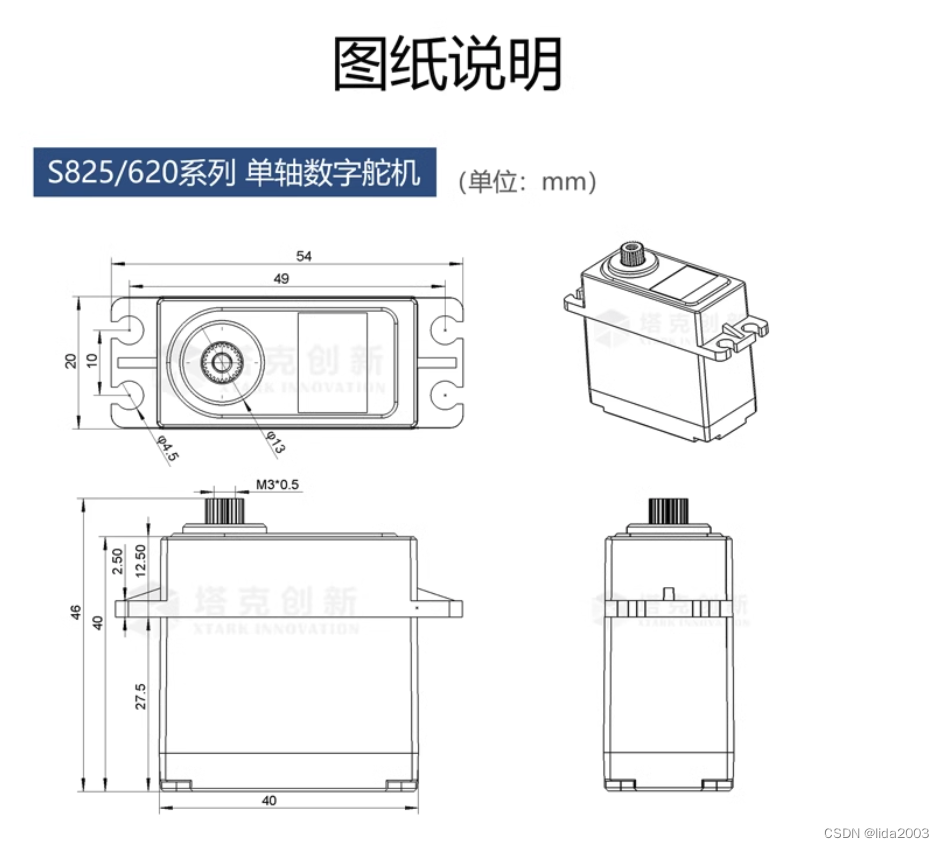
Ardupilot开源代码之Rover上路 - 后续1 1. 源由2. 问题汇总2.1 问题1:飞控选择2.2 问题2:飞控安装位置和固定2.3 问题3:各种插头、插座配套2.4 问题4:分电板缺陷2.5 问题5:电机+编码器接线及正反向问题2.6 问题6:Ardupilot是否支持编码器? 3. 基础知识3.1 电机工作电压3.2 编码器工作原理3.3 舵机规格 4. 参考资料
Ardupilot开源代码之Rover上路计划
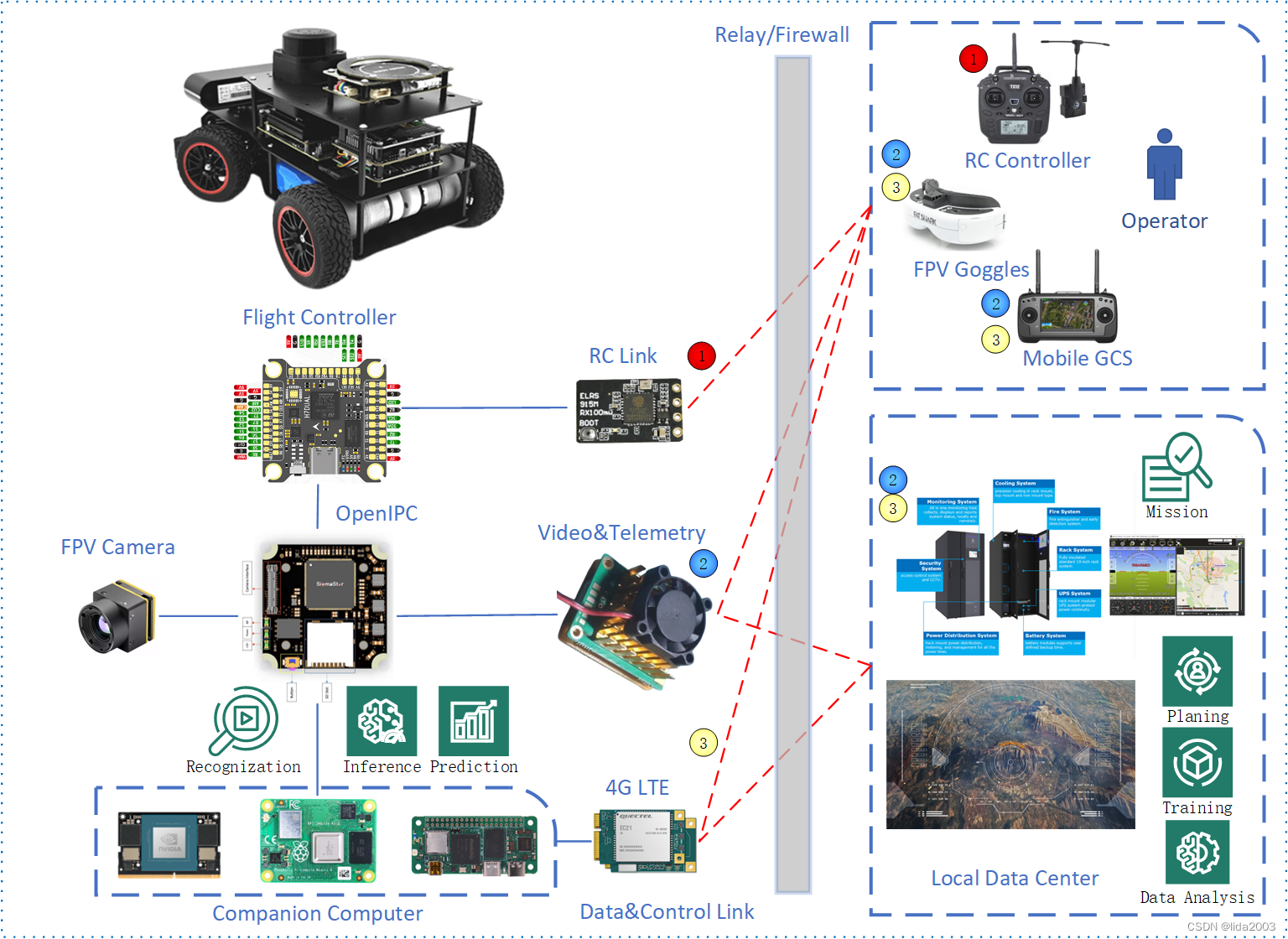
Ardupilot开源代码之Rover上路计划 1. 源由2. 思路3. 计划3.1 底盘3.1.1 底盘架子3.1.2 电机参数3.1.3 编码器参数3.1.4 舵机参数 3.2 电子部件3.2.1 有刷电调3.2.2 APM飞控 3.3 系统框图 5. 参考资料 1. 源由 最近研究点无人机的东西,注意不是穿越机。个人感觉穿越机和无人机最大的不同就是定位的目标人群差异。 有

gym 101196E Red Rover(枚举)
我们的一个较老的火星车已经完成了他的任务,正在等待指示 最后一次探索火星表面的任务。调查组已经选择了一条路线 委托你将最终的指令传送给流动站。这条路线 只是一个主要方向的一系列动作:北,南,东,西。这些 可以使用相应字符串N,S,E和W发送指令。但是, 接收到信号会消耗流动站的电源,这已经很危险了。幸好, 流动站的创建者内置了您可以选择定义可以使用的单个“宏”的功能 如