避障专题

C语言《智能自平衡小车,实现平衡功能的基础上,加入了超声波避障、超声波跟随、蓝牙遥控等功能》+源代码+文档说明
文章目录 源代码下载地址项目介绍项目功能 项目备注源代码下载地址 源代码下载地址 点击这里下载源码 项目介绍 C语言《智能自平衡小车,实现平衡功能的基础上,加入了超声波避障、超声波跟随、蓝牙遥控等功能》+源代码+文档说明 项目功能 为了实现小车功能,小车硬件主要包括: 控制核心板带编码器的直流电机车架12V 1900mah锂电池 项目备注 1、该资源内项目代码都经过

基于粒子群优化算法的六自由度机械臂三维空间避障规划
摘要:本研究旨在解决机械臂在复杂环境中避障路径规划的问题。本文提出了一种利用粒子群优化算法(PSO)进行机械臂避障规划的方法,通过建立机械臂的运动模型,将避障问题转化为优化问题。PSO算法通过模拟群体中个体的社会行为和个体行为来寻找到最佳路径,确保机械臂在避开障碍物的同时,能够高效地到达目标位置。研究表明,基于PSO算法的避障规划在收敛速度和路径优化上具有良好的性能,能够有效提高机械臂的操作效率和
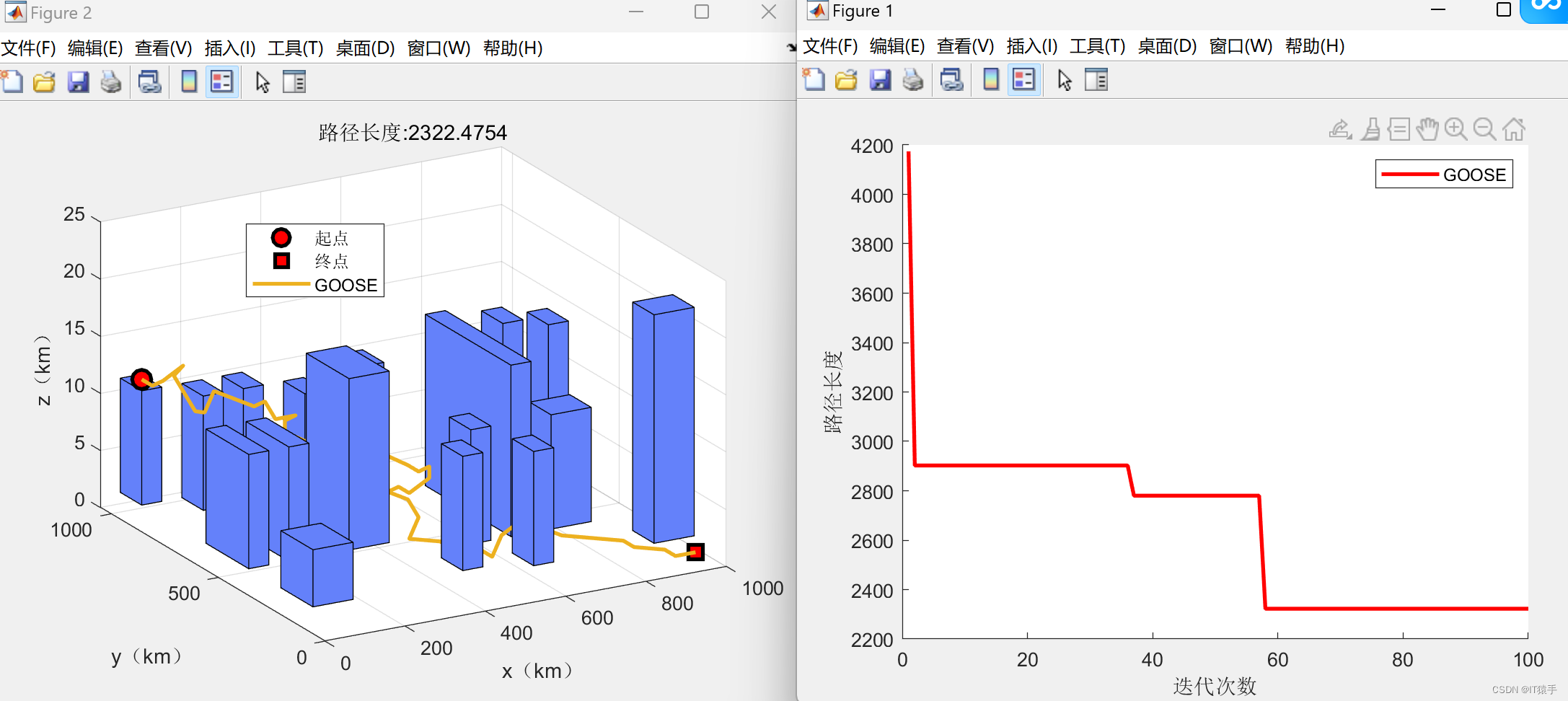
鹅算法(GOOSE Algorithm,GOOSE)求解复杂城市地形下无人机避障三维航迹规划,可以修改障碍物及起始点(Matlab代码)
一、鹅算法 鹅优化算法(GOOSE Algorithm,GOOSE)从鹅的休息和觅食行为获得灵感,当鹅听到任何奇怪的声音或动作时,它们会发出响亮的声音来唤醒群中的个体,并保证它们的安全。 参考文献 [1]Hamad R K, Rashid T A. GOOSE algorithm: a powerful optimization tool for real-world engineering
【无人机三维路径规划】基于鱼鹰算法OOA实现复杂城市地形下无人机避障三维航迹规划附Matlab代码
% 初始化遗传算法参数 population_size = 50; % 种群大小 max_generations = 100; % 最大迭代次数 mutation_rate = 0.1; % 突变率 % 定义目标函数(适应度函数) fitness_function = @(x) calculate_fitness(x); % 定义路径规划问题的约束函数 constraint_function
【附带源码】机械臂MoveIt2极简教程(六)、第三个demo -机械臂的避障规划
系列文章目录 【附带源码】机械臂MoveIt2极简教程(一)、moveit2安装 【附带源码】机械臂MoveIt2极简教程(二)、move_group交互 【附带源码】机械臂MoveIt2极简教程(三)、URDF/SRDF介绍 【附带源码】机械臂MoveIt2极简教程(四)、第一个入门demo 【附带源码】机械臂MoveIt2极简教程(五)、第二个demo - rviz可视化 【附带源码】机械臂

电位器、金属触摸传感器、红外避障传感器、烟雾传感器、倾斜开关传感器 | 配合Arduino使用案例
电位器 电位器就是一个旋转按钮,可以读取到开关旋转的数值(范围:0-1023) /****** Arduino 接线 ***** VCC - 5v* GND - GND* OUT - A0***********************/int mainPin = A0; // 接继电器的 IN 端口void setup() { Serial.begin(9600); // 串口通信用于输

语音导航系统:盲人出行的新领航者,实时避障让每一步都安心
在这个日益智能化的社会,一款名为蝙蝠避障专为盲人设计的辅助应用正以其创新的语音导航系统悄然改变着视障群体的出行方式。这款应用凭借其强大的实时避障功能,成为了盲人朋友探索世界的可靠伙伴,让每一次外出都充满了信心与自由。 语音导航系统作为这款应用
![[运动规划算法]基于似然场的快速避障算法](https://img-blog.csdnimg.cn/20210502210718623.png#pic_center)
[运动规划算法]基于似然场的快速避障算法
文章目录 一、简介二、原理1. 问题描述2. 概率模型3. 局部概率4. 全局概率5. 方法实现 三、项目演示参考 一、简介 这是一种在复杂环境中实现快速自主飞行的规划方法。通常,在复杂环境中进行自主导航需要在栅格地图上进行连续搜索,但是导航过程中通过传感器数据来对图进行更新的计算代价是昂贵的,路径规划也是一样,特别是要求搜索出的路径必须是运动学上可行的。我们建议尽量避免在线
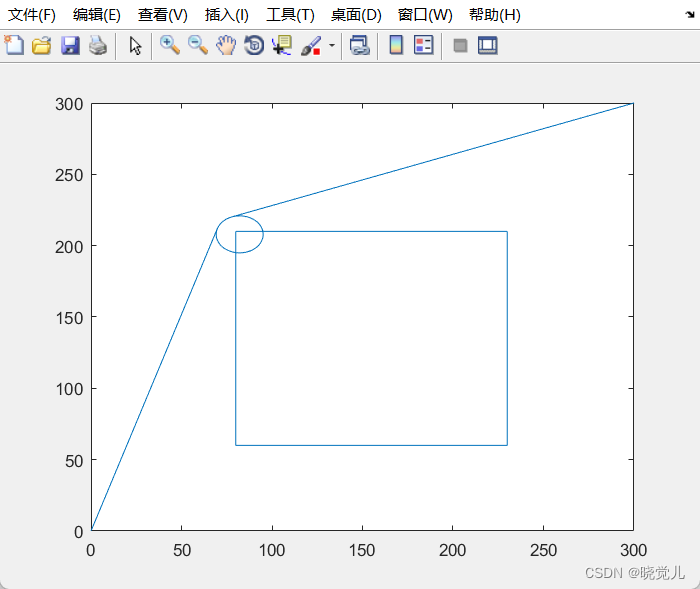
【数学建模】机器人避障问题
已知: 正方形5的左下顶点坐标 ( 80 , 60 ) (80,60) (80,60),边长 150 150 150机器人与障碍物的距离至少超过 10 10 10个单位规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。机器人不能折线转弯,转弯路径由与直线路径相切的一段圆弧组成,也可以由两个或多个相切的圆弧路径组成,但每个圆弧的半径最小为 10 10 10个单位。机器人直线行走的最
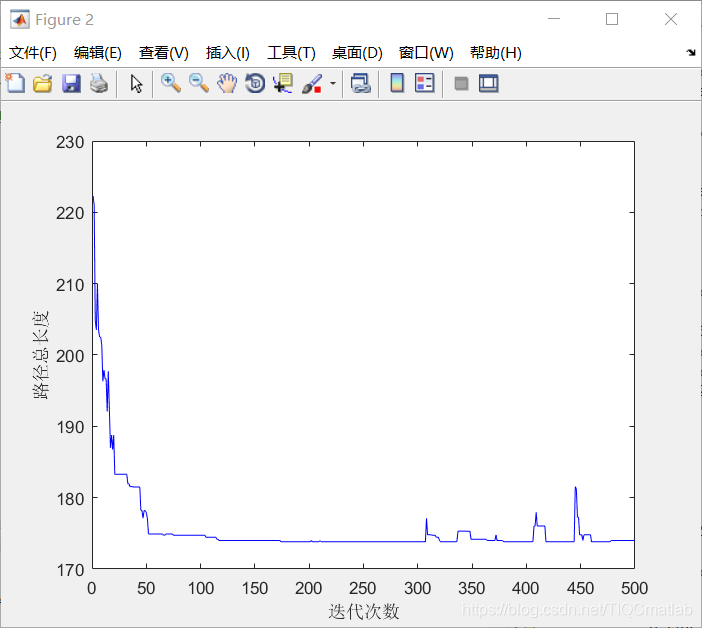
【路径规划】基于matlab改进的蚁群算法避障路径规划【含Matlab源码 335期】
✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。 🍎个人主页:海神之光 🏆代码获取方式: 海神之光Matlab王者学习之路—代码获取方式 ⛳️座右铭:行百里者,半于九十。 更多Matlab仿真内容点击👇 Matlab图像处理(进阶版) 路径规划(Matlab) 神经网络预测与分类(Matlab) 优化求解(Matlab) 语音处理(Matlab

【路径规划】基于matlab GUI粒子群算法机器人避障路径规划(手动设障)【含Matlab源码 924期】
✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。 🍎个人主页:海神之光 🏆代码获取方式: 海神之光Matlab王者学习之路—代码获取方式 ⛳️座右铭:行百里者,半于九十。 更多Matlab仿真内容点击👇 Matlab图像处理(进阶版) 路径规划(Matlab) 神经网络预测与分类(Matlab) 优化求解(Matlab) 语音处理(Matlab

【路径规划】基于matlab GUI粒子群算法机器人避障路径规划【含Matlab源码 923期】
✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。 🍎个人主页:海神之光 🏆代码获取方式: 海神之光Matlab王者学习之路—代码获取方式 ⛳️座右铭:行百里者,半于九十。 更多Matlab仿真内容点击👇 Matlab图像处理(进阶版) 路径规划(Matlab) 神经网络预测与分类(Matlab) 优化求解(Matlab) 语音处理(Matlab
【路径规划】基于六次多项式的多关节机器人避障路径规划
最近迷上了机械臂避障轨迹规划,因为之前一直做的都是无障碍物轨迹规划,所以这次想试一下有障碍物的,把避障算法用在我的SimMechanics机械臂上,看看效果咋样。以下定义不区分路径规划和轨迹规划。 by the way,本文实现的是全局静态避障,而非局部动态避障 : ) 0. 任务目标 实现六关节机器人任务空间避障轨迹规划。 1. 思路分析 本人之前尝试过使用采样算法

路径优化算法 | 基于A_Star算法实现复杂地形下无人机威胁概率地图最短路径避障三维航迹规划
概述 A* (A-Star) 算法是一种广泛使用的路径搜索和图形遍历算法,用于在给定起点和终点的情况下找到最短路径。对于无人机在复杂地形下的三维航迹规划,A* 算法可以与其他技术结合,例如威胁概率地图(Threat Probability Map),以实现避障和最短路径规划。 以下是一个基于 A* 算法实现复杂地形下无人机威胁概率地图最短路径避障三维航迹规划的基本步骤: 构建威胁概率地图:
十.固态激光雷达--扫地机的避障单线激光测距模块的cmos sensor mipi接口知识20240322
十.固态激光雷达–扫地机避障的单线激光测距模块的重要器件介绍介绍 文章目录 十.固态激光雷达--扫地机避障的单线激光测距模块的重要器件介绍介绍10.1 背景10.2 sensor mipi与DVP 接口比较10.2.1 DVP接口10.2.2 MIPI接口10.2.3 DVP/MIPI选择 10.3 sensor 卷帘快门(Rolling Shutter)与全局快门(Global Shut
【机器人栅格地图】基于A星算法求解多机器人栅格路径规划及避障Matlab源码
1 简介 移动机器人路径规划一直是一个比较热门的话题,A星算法以及其扩展性算法被广范地应用于求解移动机器人的最优路径.该文在研究机器人路径规划算法中,详细阐述了传统A星算法的基本原理,并通过栅格法分割了机器人路径规划区域,利用MATLAB仿真平台生成了机器人二维路径仿真地图对其进行仿真实验,并对结果进行分析和研究,为今后进一步的研究提供经验. 2 部分代码 function [rou
【机器人栅格地图】基于帝国企鹅、粒子群、遗传算法求解机器人栅格地图路径规划及避障问题附matlab代码
1 简介 栅格法是由W.E.Howden于1968年提出,主要是根据环境建立一个路径栅格地图(Map)。基本原理是将机器人工作环境分割成无数细小的具有二值信息的网格单元,每个网格的规格由机器人的步长决定,即一个步长代表一个网格大小。在进行网格划分时,无论是障碍物栅格还是非障碍物栅格不满一个时,将其填满,按一个栅格计算。环境信息由黑白网格表示。黑色网格代表障碍物(Barrier),表示不可行区域;


树莓派C++开发机器人智能小车(10)避障--超声波传感器
超声波传感器用于测量与障碍物或目标之间距离。一个超声波传感器由发送器和接收器组成,发送器发出超声波脉冲(也称为超声波声音),当碰到附近障碍物反弹回来被接收器接收(回声)。传感器根据发送和接收时间间隔确定与目标的距离。 我们用于项目的超声波传感器称为HC-SR04 超声波传感器,是应用最广泛之一的超声波传感器。它可以测量距离范围0-180cm,分辨率大约0.3cm.它的频率大约4

【智能车入门:pcb版】(蓝牙遥控、超声波避障、红外循迹)
实现最简单的蓝牙遥控、超声波避障、红外循迹) 总览项目获取 本篇是对 上一篇博客的改进,上一篇博客使用面包板,看起来很乱,春节结束之后嘉立创免费打板恢复,板子到了之后进行焊接测试,相较于使用面包板,这次的小车性能更稳定,外观也更简洁了,功能没变。 总览 1、实物图: 2、演示视频: 3、原理图: 4、pcb: 项目获取 工程文件包含源码
51单片机项目(29)——基于51单片机的避障跟随小车
1.功能设计 按键模式:按下按键,小车可以前后左右地运动 自动模式:根据红外传感器的状态,自行决定运动状态。检测到前方有物体时,车子移动,起到一个跟随的效果。 演示视频如下: 51单片机智能避障车 2.元件介绍 红外对管传感器是一种常见的光电传感器,它能够探测和测量环境中的红外辐射。红外辐射是一种与肉眼不可

Dynamic Window Approach_机器人局部避障的动态窗口法
最近正在学习DWA,按照DynamicWindowApproachSample.m 提供的matlab仿真代码简单梳理下,但是这并不是ros里用的,只是一个简单的仿真。DWA的原理:假设一个机器人要从当前点通过一定的速度和方向到达目标点,在速度(v, w)空间中采样多组轨迹,为这些轨迹使用评价函数进行评价,选取最优的轨迹对应的速度(v_best, w_best)来驱动机器人,最终到达目标点。 代

智能寻迹避障清障机器人设计(第七章)
7 总结与展望 7.1总结 本课题的智能小车实现了红外与蓝牙双控,可以通过红外遥控器或者蓝牙遥控器使智能小车实现调速、前进、后退、左转、右转、左旋转、右旋转、机械臂上下左右运动以及夹子的张闭,可以抓取搬运物品。除此之外,智能小车还具备了寻迹功能,可以根据黑线进行寻迹;避障功能,可通过判断周围是否有障碍物进行智能避障;跟随功能,可跟随前方物体进行前进、后退、停车、左转、右转;测距功能,当打开测距

智能寻迹避障清障机器人设计(第四章)
4 Arduino介绍与手机蓝牙APP开发 4.1 Arduino介绍 在Arduino出现之前,意大利一所高科技技术学校的学生常常抱怨市面上的微控处理器基本上操作复杂,性价比低,无法同时适应多种复杂多变的微传感器。至此,2005年的某一天,该校的老师马西莫·班兹和来这所学校研究的学者大卫·卡泰尔斯一起讨论了现下微控制器的相关问题。于是,两人设计了自己的电路板,马西莫·班兹的