本文主要是介绍【机器人栅格地图】基于帝国企鹅、粒子群、遗传算法求解机器人栅格地图路径规划及避障问题附matlab代码,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 简介
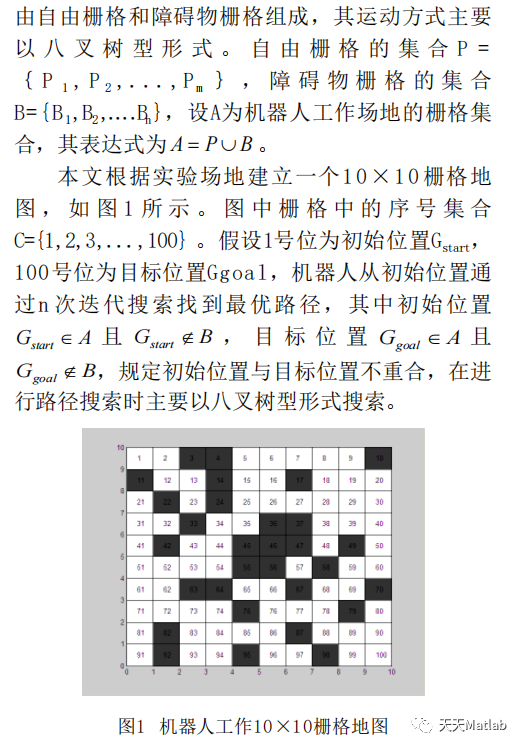
栅格法是由W.E.Howden于1968年提出,主要是根据环境建立一个路径栅格地图(Map)。基本原理是将机器人工作环境分割成无数细小的具有二值信息的网格单元,每个网格的规格由机器人的步长决定,即一个步长代表一个网格大小。在进行网格划分时,无论是障碍物栅格还是非障碍物栅格不满一个时,将其填满,按一个栅格计算。环境信息由黑白网格表示。黑色网格代表障碍物(Barrier),表示不可行区域;白色网格代表可通行区域,又称自由区域。栅格法将不可行区域和自由区域用一个二进制矩阵表示,矩阵中1代表障碍物,0代表自由栅格,由此在环境中建立一个可描述环境的路径规划地图。
这篇关于【机器人栅格地图】基于帝国企鹅、粒子群、遗传算法求解机器人栅格地图路径规划及避障问题附matlab代码的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








