本文主要是介绍红外避障模块,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
一、模块原理
二、模块使用说明
三、材料准备
四、代码
五、实验效果
实验效果
自动灯效果:
避障模块-CSDN直播
一、模块原理
红外避障模块利用光反射原理,模块前端拥有一个红外发射管和一个红外接收管。模块通电后红外发射管向前方不断发射一定频率的红外线,红外线遇到前方障碍物时,射线返回被接收管接收,此时OUT输出低电平。如前方无障碍物,射线未被反射,则OUT输出高电平。
二、模块使用说明
1、感应到物体输出0,未感应到时输出1,可直接与3V和5V单片机I0口相连。
2、感应距离2到30cm,距离远,抗干扰能力好。(注意:红外传感器不是检测所有的物体都能得到一样的距离的,不同颜色的物体对光线的反射率不同,物体的颜色越深越接近黑色检测的距离就越短,本传感器2到40cm是对着白色的墙测量出来的)
3、速度快,适合智能小车避障、黑白线循迹、防跌落,产品计数器,流水线切割,液位检测等。
4、用此传感器制作的黑白线寻迹小车无需在白纸黑线上跑,可在水泥地,黄泥地等复杂的环境黑线巡迹。只要黑线周边的颜色比黑色略浅即可,消除了传统的走法,令环境布置简单。
5、本传感器3至6V供电,范围宽,适合3V和5V单片机系统。
6、带使能端,EN端等于“1”时传感器不工作,等于o”时工作。传感器上跳帽插上后EN端长期接地(EN长期为“0”)。 要使用EN端时请把跳帽拿掉。
7、频率调节电位器用来调节红外发射管的载波频率因为一体化接收头要在特定的38KHZ载波频率的时候才是灵敏的。将502电阻顺时针调到尽(也就是将发射管的亮度调到最大),然后对准白色的墙调103电阻一直调到感应距离是远为止,这样传感器就工作在佳状态了
三、材料准备
51单片机
红外避障模块
杜邦线
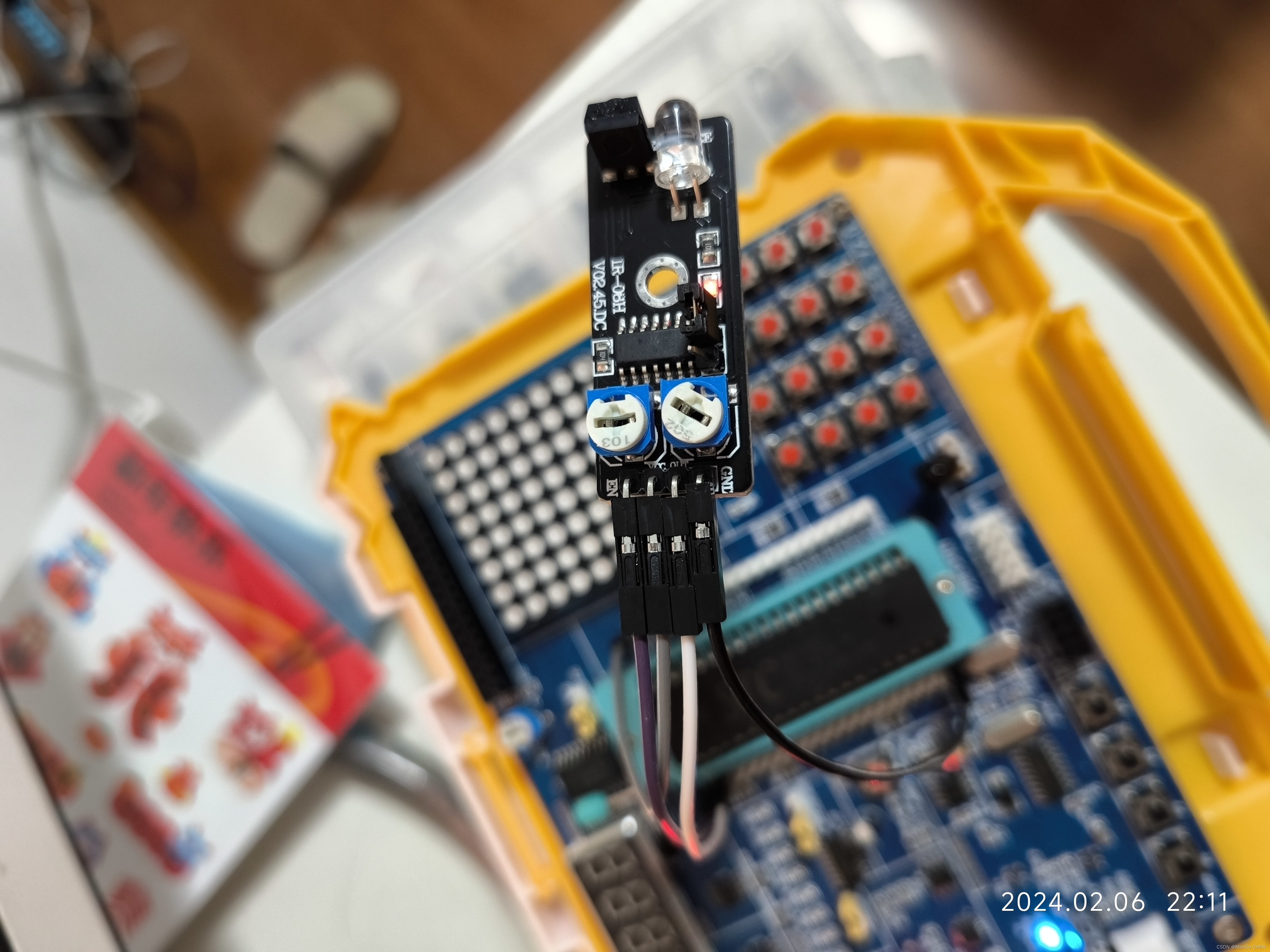
红外避障模块:
EN =P1.0
OUT =P1.1
VCC => 5V
GND => GND

四、代码
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器#define LED P2 //将单片机的P2端口定义为ledsbit Avoid_EN=P1^0; //将单片机的P1.0端口定义为Avoid_EN
sbit Avoid_OUT=P1^1; //将单片机的P1.1端口定义为Avoid_OUT
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void main()
{Avoid_EN = 0;while(1){if(Avoid_OUT == 0){LED=0x00; //P2端口设置为低电平}else{LED=0xff; //P2端口设置为低电平}}
}
五、 实验效果
自动灯效果:
避障模块-CSDN直播
这篇关于红外避障模块的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






