本文主要是介绍51单片机项目(29)——基于51单片机的避障跟随小车,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.功能设计
按键模式:按下按键,小车可以前后左右地运动
自动模式:根据红外传感器的状态,自行决定运动状态。检测到前方有物体时,车子移动,起到一个跟随的效果。
演示视频如下:
51单片机智能避障车
2.元件介绍
红外对管传感器是一种常见的光电传感器,它能够探测和测量环境中的红外辐射。红外辐射是一种与肉眼不可见的电磁辐射,具有较长的波长,通常在0.7微米至1毫米之间。
红外对管传感器由两个主要的组件组成:红外发射器和红外接收器。红外发射器发射红外光,并且当有物体接近时,红外光会被物体反射或散射。红外接收器用于接收反射回来的红外光,并将其转换为电信号。
当有物体接近红外对管传感器时,接收器会接收到更多的反射红外光,导致输出电信号的强度增加。这样,红外对管传感器能够检测到物体的存在、距离和位置。
红外对管传感器在很多应用中都有广泛的应用,例如自动门控制、安防系统、反射型光电开关等。它们具有快速响应、高灵敏度和可靠性等特点,适用于各种环境条件下的使用。

单片机无法直接驱动电机,所以需要使用电机驱动模块。常用的电机驱动模块是L298N,其实物图如下:
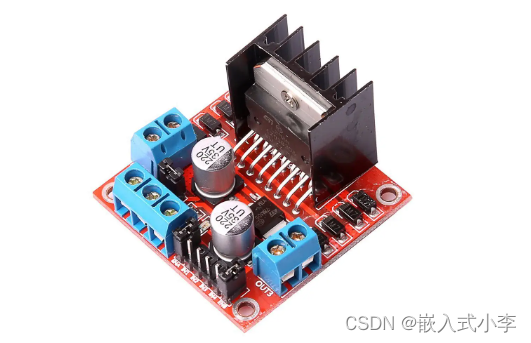
L298N是一种常用的双H桥驱动芯片,用于控制直流电机、步进电机和其他类似的负载设备。它由STMicroelectronics公司生产,并且在机器人、汽车控制和其他电机驱动应用方面得到广泛应用。
L298N芯片具有以下主要特性和功能:
1. 双H桥驱动:L298N芯片内部包含两个独立的H桥电路,可以控制两个直流电机(或一个步进电机)的转向和转速。这使得L298N非常适合于需要控制电机前进、后退和停止的应用。
2. 高电流能力:L298N能够输出高达2A的持续电流,并且能够承受峰值达到3A的电流。这种高电流能力使其适用于一些需要高功率输出的大型电机驱动应用。
3. 逻辑电平兼容:L298N的控制引脚可以与微控制器或其他数字电路的输出信号逻辑电平兼容。这使得L298N非常容易与其他电子设备进行集成和控制。
4. 内部自动过热保护:L298N芯片内部集成了过热保护电路,可防止芯片过热和损坏。当温度超过一定阈值时,过热保护将自动断开电路以保护芯片。
5. 多种电源输入选择:L298N支持多种电源配置,包括单电源或双电源供电。这使得L298N适用于不同的电源供应要求和应用场景。
总的来说,L298N是一款强大、易于使用和灵活的电机驱动芯片,广泛应用于机器人、车辆控制和其他需要电机控制的应用中。
3.课题意义
1. 学习嵌入式系统和物联网技术:通过实现避障和跟随功能,可以学习如何设计和构建嵌入式系统,理解单片机的工作原理以及如何实现各种传感器的数据采集和处理。同时,还可以探索和学习如何将物理设备与互联网相连接,实现物联网技术的应用。
2. 探索传感器应用和数据处理:使用传感器(例如红外对管传感器、超声波传感器等)来检测和感知环境中的障碍物或其他目标物,并通过数据处理算法进行决策和控制。这可以让人们了解传感器的原理和应用,以及如何使用数据处理算法来实现自主决策和控制功能。
3. 研究智能控制算法:为了使小车能够实现避障和跟随功能,需要设计和实现智能控制算法。这包括路径规划、障碍物检测与避障、目标物跟踪与跟随等算法。通过研究和实现这些算法,可以提高对智能控制领域的理解,并培养解决实际问题的能力。
4. 培养创新和动手能力:课题要求学生设计和构建避障跟随小车,这涉及到硬件设计和组装、编程实现等方面。通过实际动手完成项目,可以培养学生的创新思维、动手能力和问题解决能力,提高他们的综合实践能力。
4.源文件
基于51单片机的避障小车资源-CSDN文库![]() https://download.csdn.net/download/guangali/88833517?spm=1001.2014.3001.5501
https://download.csdn.net/download/guangali/88833517?spm=1001.2014.3001.5501
这篇关于51单片机项目(29)——基于51单片机的避障跟随小车的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







