小车专题

基于UE5和ROS2的激光雷达+深度RGBD相机小车的仿真指南(五):Blender锥桶建模
前言 本系列教程旨在使用UE5配置一个具备激光雷达+深度摄像机的仿真小车,并使用通过跨平台的方式进行ROS2和UE5仿真的通讯,达到小车自主导航的目的。本教程默认有ROS2导航及其gazebo仿真相关方面基础,Nav2相关的学习教程可以参考本人的其他博客Nav2代价地图实现和原理–Nav2源码解读之CostMap2D(上)-CSDN博客往期教程: 第一期:基于UE5和ROS2的激光雷达+深度RG

基于微信小程序与嵌入式系统的智能小车开发(详细流程)
一、项目概述 本项目旨在开发一款智能小车,结合微信小程序与嵌入式系统,提供实时图像处理与控制功能。用户可以通过微信小程序远程操控小车,并实时接收摄像头采集的图像。该项目解决了传统遥控小车在图像反馈和控制延迟方面的问题,提升了小车的智能化水平,适用于教育、科研和娱乐等多个领域。 二、系统架构 1. 系统架构设计 本项目的系统架构主要分为以下几个部分: 微信小程序:负责用户界面、控制指令的

基于51单片机的智能小车转向控制系统设计与实现
文章目录 前言资料获取设计介绍功能介绍具体实现截图参考文献设计获取 前言 💗博主介绍:✌全网粉丝10W+,CSDN特邀作者、博客专家、CSDN新星计划导师,一名热衷于单片机技术探索与分享的博主、专注于 精通51/STM32/MSP430/AVR等单片机设计 主要对象是咱们电子相关专业的大学生,希望您们都共创辉煌!✌💗 👇🏻 精彩专栏 推荐订阅👇🏻 单片机设计精品
C语言《智能自平衡小车,实现平衡功能的基础上,加入了超声波避障、超声波跟随、蓝牙遥控等功能》+源代码+文档说明
文章目录 源代码下载地址项目介绍项目功能 项目备注源代码下载地址 源代码下载地址 点击这里下载源码 项目介绍 C语言《智能自平衡小车,实现平衡功能的基础上,加入了超声波避障、超声波跟随、蓝牙遥控等功能》+源代码+文档说明 项目功能 为了实现小车功能,小车硬件主要包括: 控制核心板带编码器的直流电机车架12V 1900mah锂电池 项目备注 1、该资源内项目代码都经过

电赛2024年H题智能小车基于MSPM0G3507主控MCU(利用8路灰度加上MPU6050的解决方式)具体项目报告
题目:自动行驶小车(H题) 摘要 本项目由微处理器MSPM0G3507,编码器电机驱动,8路灰度传感器指示线巡线单元,MPU6050六轴传感器无线直行单元,OLED显示人机互动单元,红色LED及蜂鸣器声光提示单元构成。系统运行由两部分组成:自动行驶小车的无指示线直行控制部分和有指示线弯道行驶的实时转向控制部分,小车的无指示线直行控制部分,由MPU6050六轴传感器获得小车姿态的偏航角,通过获得

电赛2024年H题智能小车基于MSPM0G3507主控MCU(利用8路灰度加上MPU6050的解决方式)
一.前言 前段时间,激烈的电赛刚刚结束,很荣幸啊,也是十分的不甘心,本次的湖北赛区H题只拿到了一个省二,看最终的排名,在H题中我们离省一也就差几名。但是整个比赛已经过去了,现在不甘与不舍,也没有任何意义了,只有接收这一现实了。 当时我们整个比赛要求一二三都完美完成,要求四能够十分稳定的跑下来但是跑完四圈得花1分30秒,大概是跑十次才死一两次的样子(毕竟比赛,谁也

微信小程序App实现小车方向控制
目录 概述 1 系统框架结构 1.1 结构介绍 1.2 硬件模块介绍 1.2.1 蓝牙模块介绍 1.2 .2 模块功能介绍 2 功能实现 2.1 微信小程序APP 2.2 下位机功能 3 功能测试 3.1 小程序UI测试 3.2 小车方向控制 微信小程序和蓝牙模块控制小车运行状态 概述 本文主要介绍使用微信小程序和蓝牙模块设计一个智能小程控制系统,笔者介

Underactuated Robotics - 欠驱动机器人学(三)- 体操机器人、小车摆杆和四旋翼飞行器
系列文章目录 前言 在低维模型系统的背景下,已经开展了大量有关欠驱动系统控制的工作。这些模型系统捕捉到了问题的本质,却没有引入更真实世界的例子中经常涉及的所有复杂性。在本章中,我们将重点讨论两个最著名、研究最深入的模型系统--Acrobot 和 Cart-Pole。在我们开发了一些工具后,我们将看到这些工具可以直接应用于其他模型系统;我们将使用四旋翼机器人举出一些例子。所有这些系统都是
基于STM32的红外循迹小车设计与实现
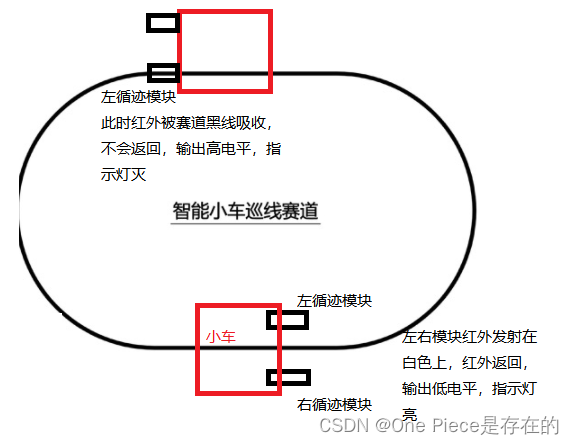
红外循迹小车是一种通过检测反射红外光来自动导航的智能小车。它广泛应用于教育、竞赛和研究领域。本文将详细介绍基于STM32微控制器的红外循迹小车的设计和实现过程。 引言 红外循迹技术利用红外发射器发射红外光,并通过红外接收器检测反射回来的红外光的强度变化来识别路径。STM32微控制器因其强大的处理能力和丰富的外设接口,非常适合用于红外循迹小车的控制。 系统设计 硬件组成 STM32微控制器

控制小车在仿真环境中移动
urdf——Gazebo——ros_control——MoveIt 1、gazebo_ros程序包路径 /opt/ros/kinetic/share/gazebo_ros worlds路径 /usr/share/gazebo-7/worlds

WIFI小车记录五:单片机串口通信
单片机用的是ATMege 128,编程软件用的是ICCV8 for AVR CodeBlocks IDE。CodeBlocks 这么好用的IDE套在了ICCAVR上面,用起来各种好看各种爽啊,各种配置只要点点点就可以自动生成!! 单片机编程已经有点经验,总体上还是比较简单的。遇到困难的地方主要就是串口通信了,之前没有接触过。好在也一个个解决了。下面就贴一下串口通信的代码吧。

WIFI小车记录四:用Adobe Illustrator绘制应用磁贴
前一篇中,控制小车的应用基本写出来了,可是部署到手机之后应用图标是一个默认的“×”,非常没有辨识度。既然要做出一个应用,那边来绘制一下自己的图标吧。 Windows Phone的应用图标是一个个的动态磁贴,与其他平台有着鲜明的区别。从下面一张图便可以看出来,磁贴的主体部分是一个个抽象的图形(忽略那个充满违和感的新浪大眼睛),而其它部分则会随着手机的主题颜色改变。其实,在磁

WIFI小车记录二:路由器篇
首先贴上两个论坛,我的好多资料都是从这里找的: 恩山wifi论坛:http://www.right.com.cn/forum/forum.php WiFi机器人网 http://www.wifi-robots.com/ 制作WiFi小车的基本原理就是用路由器与单片机之间进行串口通信,手机或电脑连上路由器产生的WIFI,进而可以利用客户端与路由器进行S
WiFi小车记录一:基本构思
WiFi小车制作目标: 桌面应用、Windows Phone应用可控制小车、接受小车传回的视频;桌面应用可以进行图像识别、视频录制、路径绘制等功能;WP、Win8应用可以使用重力感应进行控制小车;小车实时传回两轮速度信息,遇障碍时可以回传周围障碍信息;待续。。。 WiFI小车核心硬件: Atmega128单片机;TPLink 703N路由器;LM2596稳压模块;小车车架 WiF

树莓派4B智能小车-安装Raspbian系统
基于树莓派4的智能小车买后总结 吐下血,买了套Raspberry PI 4B智能小车,开发些有趣的应用。 对比3B+和4B,发现整个电路更简洁、支持蓝牙5即更是再无所求了。这样,就可以做很多开箱即用的快速开发,比如边缘网关、机器人、流媒体服务器、高端的设备(广告机,红酒、咖啡等自动售卖机。 给SD卡安装Raspbian系统 下载Raspberry Pi Imager工具 https:/


【自动驾驶】ROS小车系统
文章目录 小车组成轮式运动底盘的组成轮式运动底盘的分类轮式机器人的控制方式感知传感器ROS决策主控ROS介绍ROS的坐标系ROS的单位机器人电气连接变压模块运动底盘的电气连接ROS主控与传感器的电气连接ROS主控和STM32控制器两种控制器的功能运动底盘基本组成电池电机控制器与驱动器 小车组成 轮式运动底盘的组成 • 电源电池 提供能源。 • 控制器、驱动器 控制器

基于STM32和人工智能的智能小车系统
目录 引言环境准备智能小车系统基础代码实现:实现智能小车系统 4.1 数据采集模块4.2 数据处理与分析4.3 控制系统4.4 用户界面与数据可视化应用场景:智能小车管理与优化问题解决方案与优化收尾与总结 1. 引言 随着机器人技术的发展,智能小车在教育、科研、娱乐等领域得到了广泛应用。通过结合STM32嵌入式系统和人工智能技术,可以实现更智能的小车控制和数据处理,提升小车的性能和应用价值。
《平衡小车控制系统》电子设计大赛校赛感悟
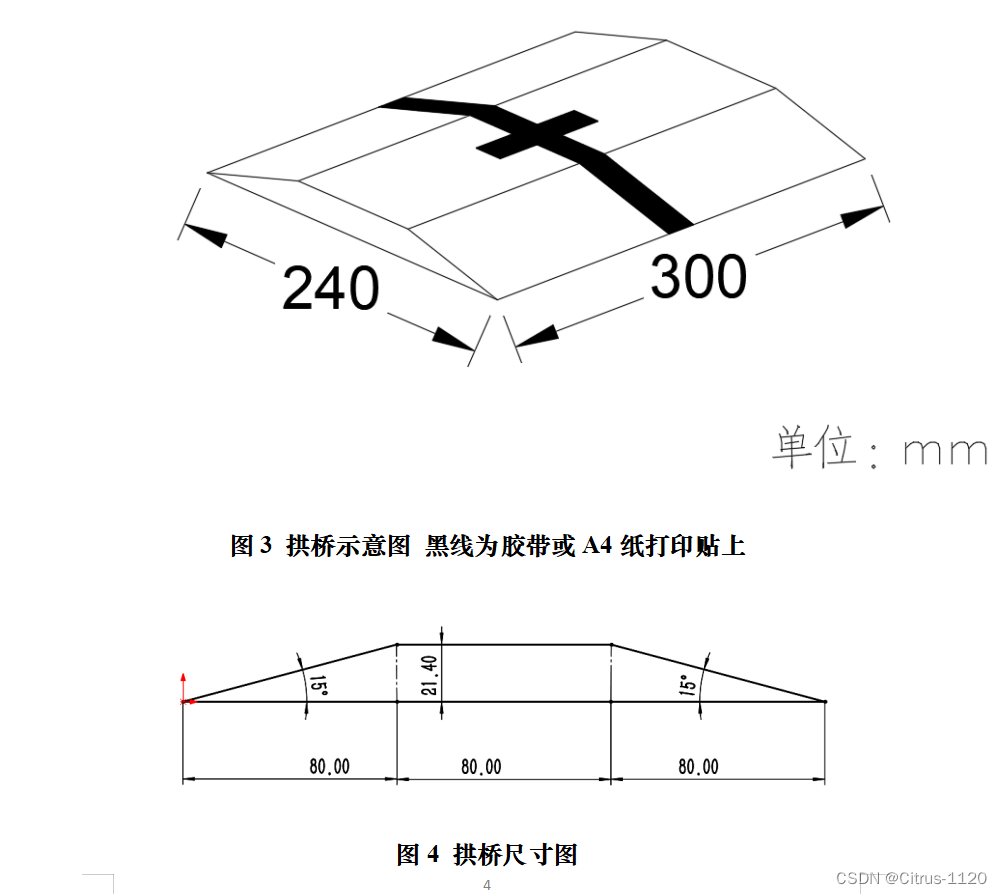
我们学校举行了一次电子设计大赛选拔赛,虽然我们在测试的时候全部都可以完成,最后考核的时候因为方案选择问题以及各种设计逻辑等原因没能成功晋级,但我能从这次备赛中学到很多东西,遂分享一下,与广大网友交流经验。(只讲思路,代码太烂了就不提供了) 题目如下: 考察点: 基础部分:1.小车循迹 2.停车+蜂鸣器 3.控速停车 发挥部分:1.视觉云台,激光打靶 2.上下坡 3.字模识别+信息传输
ROS机器人小车建模仿真与SLAM
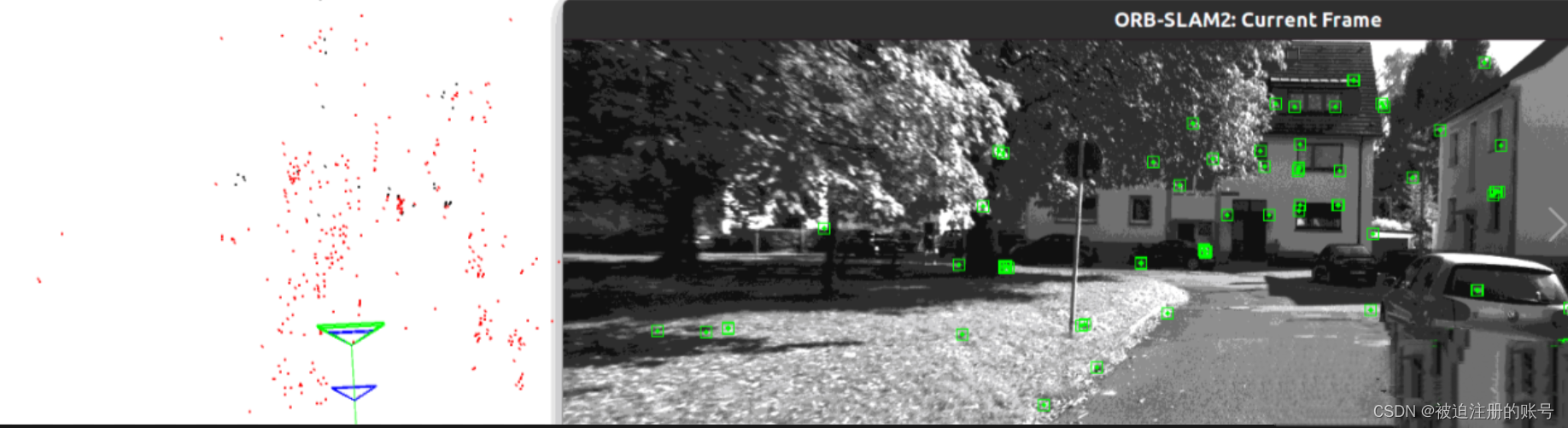
文章目录 一、URDF二、创建小车模型1.创建功能包2.导入依赖3.创建urdf,launch文件:4.可视化 三、添加雷达1.xacro文件2.集成和修改launch3.添加摄像头和雷达 三.GAZEBO仿真四、orbslam2+kitti1.下载2.安装编译ORB_SLAM23.运行Kitee数据集 一、URDF URDF,即统一机器人描述格式(Unified Robo

基于STM32和人工智能的自动驾驶小车系统
目录 引言环境准备自动驾驶小车系统基础代码实现:实现自动驾驶小车系统 4.1 数据采集模块4.2 数据处理与分析4.3 控制系统4.4 用户界面与数据可视化应用场景:自动驾驶应用与优化问题解决方案与优化收尾与总结 1. 引言 随着人工智能和嵌入式系统技术的发展,自动驾驶技术在交通、物流等领域得到了广泛应用。本文将详细介绍如何在STM32嵌入式系统中结合人工智能技术实现一个自动驾驶小车系统,包

使用树莓派和 L298N 来 DIY 小车底盘
树莓派小车可以作为 STEM(科学、技术、工程、数学)教育的工具,在实际操作中帮助学生理解和学习电子技术、编程和机器人原理。可以培养学生的动手能力、解决问题的能力和创新思维。 随着近年 AI 技术的高速发展,SLAM、VSLAM 甚至带 AI 功能的智能小车也成了学生们热衷的 “玩具”,价格不菲的成品智能小车,却也阻挡了不少学生的求知热情和脚步。 DIY 一个自己的丐版小车底盘,一来可以省米,

顶升搬运小车与激光叉车的实际应用案例
本项目旨在实现卡板的自动化运输与仓储管理,通过引入顶升搬运小车(AGV)与激光叉车两种自动化设备,提高运输效率,减少人工干预,并确保流程的顺畅与安全。 一、产品特性与需求分析 考虑到产品为单一种类的卡板,规格为1200mm*1000mm,我们选用了顶升搬运小车与激光叉车作为解决方案的核心设备。顶升搬运小车能够根据人工信号选择不同运输路线,实现卡板的灵活搬运;而激光叉车则负责仓储管理及卡板的
Pixi绘制地图和小车
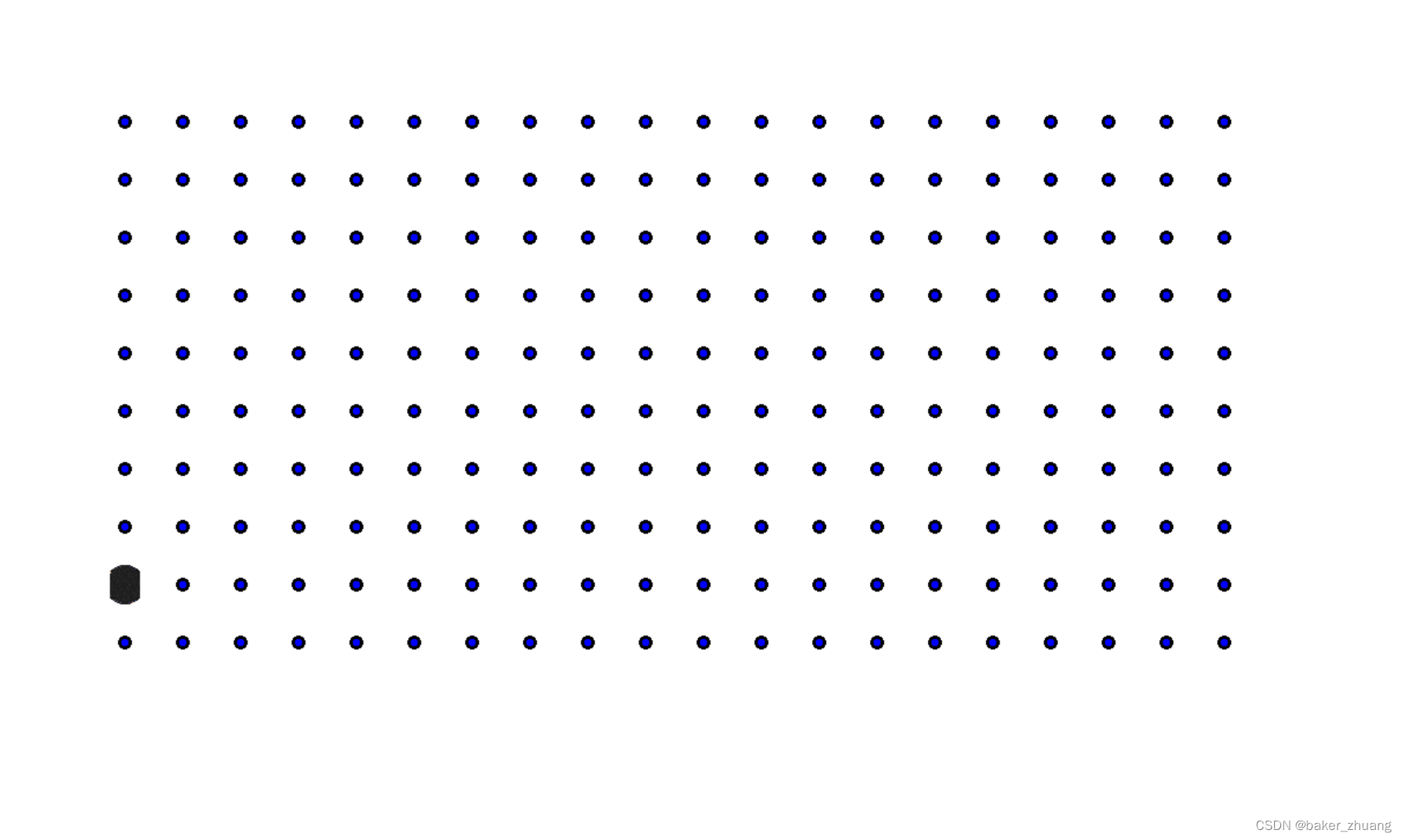
之前已经用Pixi绘制出了各种图形以及通过图片绘制精灵,这节用pixi绘制网格地图,并通过图片制作一个Sprite,让这个Sprite在网格地图上运动。首先需要在页面中添加一个div用来后期展示canvas的画布,并将此div实例化为PIXI的Application,作为接下来使用的stage, <div ref="pixiContainer" style="width: 100
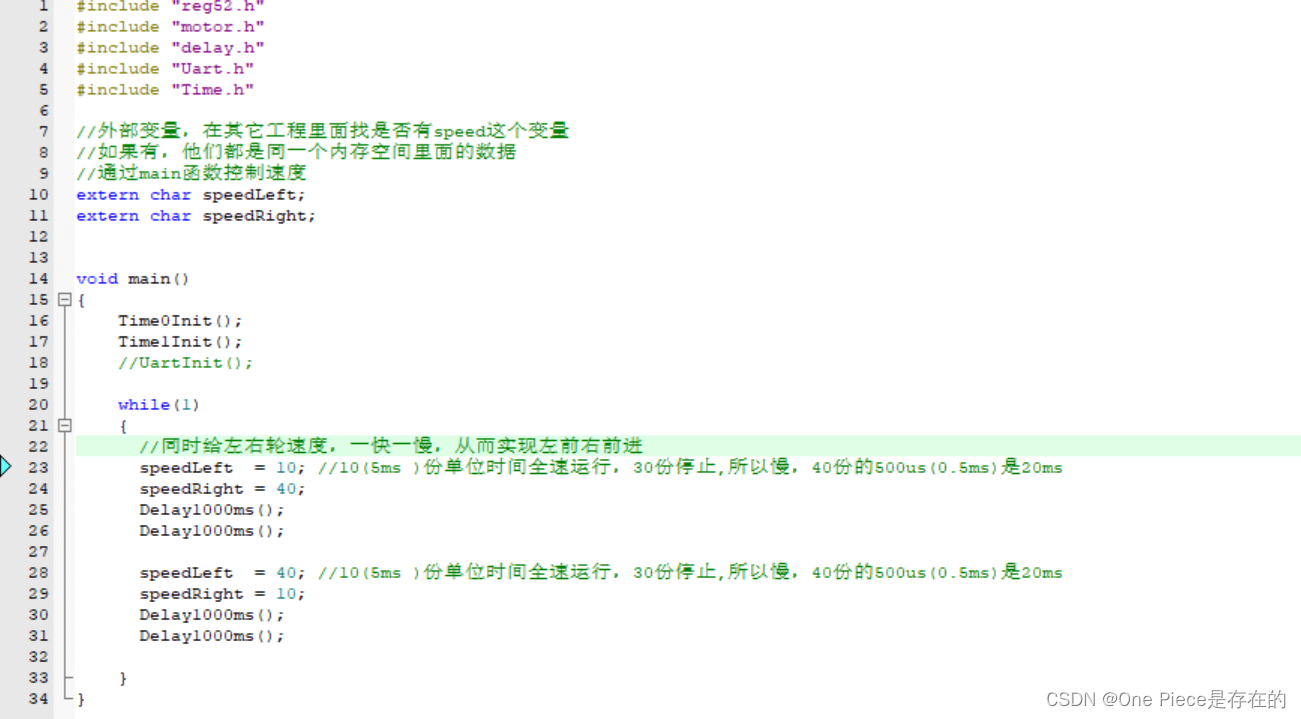
串口控制小车和小车PWM调速
1.串口控制小车 1. 串口分文件编程进行代码整合,通过现象来改代码 2.接入蓝牙模块,通过蓝牙控制小车 3.添加点动控制,如果APP支持按下一直发数据,松开就停止发数据(蓝牙调试助手的自定义按键不能实现),就能实现前进按键按下后小车一直往前走的功能 2.如何进行小车PWM调速 原理:全速前进是LeftCon1A = 0