本文主要是介绍微信小程序App实现小车方向控制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
概述
1 系统框架结构
1.1 结构介绍
1.2 硬件模块介绍
1.2.1 蓝牙模块介绍
1.2 .2 模块功能介绍
2 功能实现
2.1 微信小程序APP
2.2 下位机功能
3 功能测试
3.1 小程序UI测试
3.2 小车方向控制
微信小程序和蓝牙模块控制小车运行状态
概述
本文主要介绍使用微信小程序和蓝牙模块设计一个智能小程控制系统,笔者介绍了系统的实现框架结构,还介绍了微信小程序的代码结构和源代码。下位机部分树妖包括:小车方向控制代码,微信小程序与下位机的通信方法。
1 系统框架结构
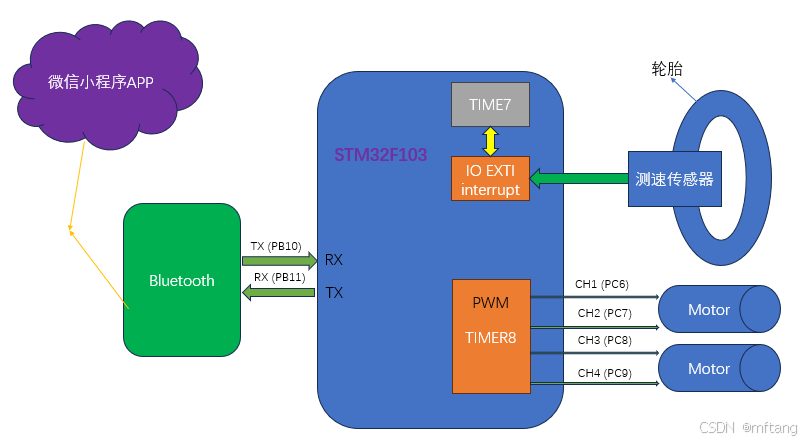
1.1 结构介绍
1) 使用STM32F103 Timer8 产生4路PWM信号,用于控制电机的转向和调速
2) TIMER7和IO EXIT interrupt 控制光电编码器,用于计算当前电机的转速
3) STM32F103 UART-3接口和蓝牙模块通信
1.2 硬件模块介绍
1.2.1 蓝牙模块介绍
HC-08蓝牙串口通信模块是新一代的基于Bluetooth Specification V4.0 BLE 蓝牙协议的数传模块。无线工作频段为 2.4GHz ISM,调制方式是 GFSK。模块最大发射功率为4dBm,接收灵敏度-93dBm,空旷环境下和 手机可以实现 80 米超远距离通信。
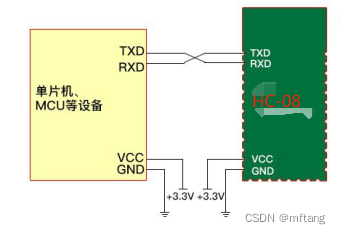
其和MCU之间通过串口通信,软件设计也简单便捷,且不需要考虑蓝牙协议栈问题,非常适合做速成产品。
蓝牙模块与MCU之间连接图:
1.2 .2 模块功能介绍
1)测试传感器
工作原理:
当模块中的槽无遮挡时,接收管导通,DQ输出为低电平
当槽被遮挡时,DQ输出为高电平。
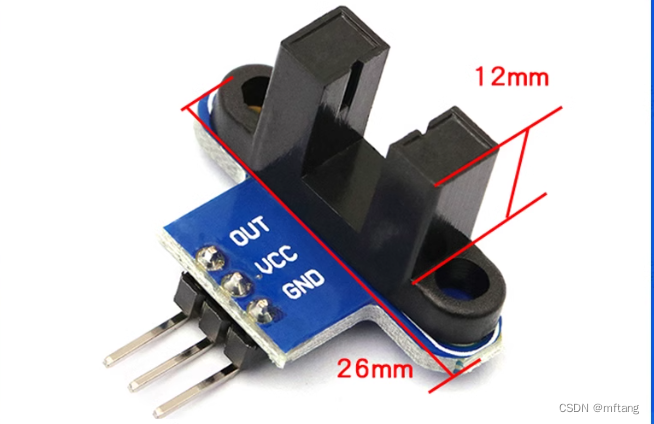
2)码盘
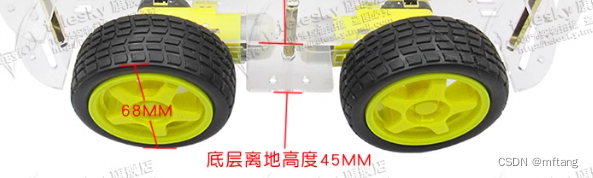
该码盘一周总共有20个孔,则其将一个圆分为20个等分,在测速的时候。只需记录其在1s时间内走过孔的个数,然后通过轮胎的周长与孔等分的关系,就能计算出速度。

3)轮胎参数
根据参数可得,轮胎的直径为:6.8cm
2 功能实现
2.1 微信小程序APP
1) UI设计
通过4个按钮控制小车的运动方向

2)代码实现:
在 detail.wxml 文件中实现如下UI代码
<view class="connect_box"><text class='connect_device_name'>{{deviceName}}</text><text wx:if="{{connected}}" class="connect_state" catchtap="DisConnectTap">已连接</text><text wx:else class="connect_state" catchtap="DisConnectTap" >未连接</text>
</view><view class="block-content"><view class="block-item column"><view class="item-row slider-box"><view class="item-title" ><image class="item-title-icon" src="/images/light_s.png" />温度(℃)</view><view class="input-unit"></view><view class="item-title" style="position: relative; left: 30rpx; "><image class="item-title-icon" src="/images/light_s.png" />湿度(%)</view><view class="input-unit"></view></view><view class="item-row"><view class="input-value"><input type="digit" value="{{temphtValue}}" disabled="false"/></view><view class="input-value" style="position: relative; left: -40rpx; "><input type="digit" value="{{humidityValue}}" disabled="false"/></view></view></view> <view class="block-item column"><view class="item-row slider-box"><view class="item-title"><image class="item-title-icon" src="/images/light_s.png" />光照(lux)</view><view class="input-unit"></view><view class="item-title" style="position: relative; left: 60rpx; "><image class="item-title-icon" src="/images/light_s.png" />SR测距(cm)</view><view class="input-unit"></view></view><view class="item-row"><view class="input-value" ><input type="digit" value="{{luxValue}}" disabled="false"/></view><view class="input-value" style="position: relative; left: -40rpx; "><input type="digit" value="{{srValue}}" disabled="false"/></view></view></view> <view class="block-item column" style="width: 750rpx; height: 507rpx; display: flex; box-sizing: border-box; left: 0rpx; top: 0rpx; position: relative"><button type="primary" bindtap="run_up" plain="true" style="position: relative; left: 3rpx; top: 5rpx; width: 183rpx; height: 357rpx; display: block; box-sizing: border-box">前进</button><button type="primary" bindtap="run_down" plain="true" style="position: relative; left: 0rpx; top: 263rpx; width: 188rpx; height: 326rpx; display: block; box-sizing: border-box">后退</button><button type="primary" bindtap="run_left" plain="true" style="position: relative; left: -247rpx; top: 3rpx; width: 183rpx; height: 361rpx; display: block; box-sizing: border-box">左转</button><button type="primary" bindtap="run_right" plain="true" style="position: relative; left: 256rpx; top: -82rpx; width: 183rpx; height: 343rpx; display: block; box-sizing: border-box">右转</button><button type="primary" bindtap="run_stop" plain="true" style="position: relative; left: 5rpx; top: -173rpx; width: 179rpx; height: 361rpx; display: block; box-sizing: border-box">停止</button></view>
</view>逻辑功能实现:
const utils = require('utils.js')
const ble = require('bluetooth.js')
Page({/*** 页面的初始数据*/data: {pageload: false,connected: false,send_hex: false,send_string: true,send_string_val: 'Hex',recv_string: true,recv_string_val: 'Hex',recv_value: '',send_number: 0,recv_number: 0,recv_hex: true,try_cnt:0,rece_string:'',deviceArray: []},/*** 生命周期函数--监听页面加载*/onLoad: function (options) {var that = this; console.log(options);this.setData({pageload:true,connected: false,deviceId: options.id,try_cnt:0,deviceName: options.name});console.log("detail: onLoad");wx.stopBluetoothDevicesDiscovery({success: function (res) {console.log('停止搜索设备', res)}})that.closeBLEConnection(that.data.deviceId);that.createBLEConnection(that.data.deviceId, that.data.deviceName); }, onHide () {var that = this;// Do something when hide.// 断开连接console.log("detail: onHide");},onShow:function(){ // var that = this; // connect bluetooth// that.closeBLEConnection(that.data.deviceId);// that.createBLEConnection(that.data.deviceId, that.data.deviceName); },onUnload() {var that = this;this.setData({pageload:true,connected: false,try_cnt:0,});console.log("page: onUnload ");that.offBLEMonitor();that.closeBLEConnection(that.data.deviceId);that.closeBluetoothAdapter();wx.showToast({title: '断开蓝牙',icon: 'success',duration: 2000}) },DisConnectTap:function(){var that = this;that.setData({pageload:true,connected: false,try_cnt:0,});ble.openBluetoothAdapter(that.data.deviceId, that.data.deviceName);that.createBLEConnection(that.data.deviceId, that.data.deviceName); },RecvCleanTap: function () {this.setData({recv_value: '',recv_number: 0});}, /*** 创建连接* @param {*} deviceId * @param {*} name */createBLEConnection(deviceId, name) {wx.createBLEConnection({deviceId, success: (res) => {console.log('createBLEConnection - success: ', res)this.getBLEDeviceServices(deviceId) },fail: (res) => {console.error('createBLEConnection - fail: ', res)if(res.errCode == 10006 ){this.createBLEConnection(deviceId, name)}else{ble.openBluetoothAdapter(deviceId, name)this.createBLEConnection(deviceId, name)}this.setData({connected: false,}) } })},getBLEDeviceServices(deviceId) {var that = this;wx.getBLEDeviceServices({deviceId,success: (res) => {console.log('getBLEDeviceServices - success: ', res)for (let i = 0; i < res.services.length; i++) {var ergodic_UUID =res.services[i].uuid; //取出服务里面的UUIDvar UUID_slice = ergodic_UUID.slice(4, 8); //截取4到8位console.log('getBLEDeviceServices, service ID = ', res.services[i].uuid);if ( res.services[i].isPrimary && (UUID_slice == "FFE0") ) {that.setData({serviceId: res.services[i].uuid,});break;}}wx.getConnectedBluetoothDevices({services: res.services,success: (res) => { console.log("getConnectedBluetoothDevices - success: " + res)},fail: (res) => {console.error('getConnectedBluetoothDevices - fail: ', res)ble.openBluetoothAdapter(deviceId, that.data.deviceName)} })that.getBLEDeviceCharacteristics(deviceId, that.data.serviceId);},fail: (res) => {console.error('getBLEDeviceServices - fail: ', res)// try it againble.openBluetoothAdapter(deviceId, that.data.deviceName)that.monitor_connected();} });},getBLEDeviceCharacteristics(deviceId, serviceId) {var that = this;let falg = false;wx.getBLEDeviceCharacteristics({deviceId,serviceId,success: (res) => {that.setData({connected: true,}) console.log('getBLEDeviceCharacteristics success', res.characteristics)for (let i = 0; i < res.characteristics.length; i++) {let item = res.characteristics[i]console.log('getBLEDeviceCharacteristics, Characteristics ID = ', item.uuid)// 该特征值:可读if (item.properties.read) {wx.readBLECharacteristicValue({deviceId,serviceId,characteristicId: item.uuid,})}// 该特征值:可写if (item.properties.write) {this.setData({canWrite: true})this._deviceId = deviceIdthis._serviceId = serviceIdthis._characteristicId = item.uuidthis.writeValue()}if (item.properties.notify || item.properties.indicate) {that.setData({characteristicId: item.uuid});falg = true;break;}}if( falg ){console.debug('getBLEDeviceCharacteristics - deviceId : ', deviceId)console.debug('getBLEDeviceCharacteristics - serviceId : ', serviceId)console.debug('getBLEDeviceCharacteristics - characteristicId: ', that.data.characteristicId)// read device character value that.readBLECharacteristicValue(deviceId, serviceId, that.data.characteristicId) that.notifyBLECharacteristicValueChange(deviceId, serviceId, that.data.characteristicId) }},fail: (res) => {console.error('getBLEDeviceCharacteristics -- fail: ', res)this.setData({connected: false,})if (res.errCode === 10006){that.offBLEMonitor();that.createBLEConnection(deviceId, that.data.deviceName); }}})},readBLECharacteristicValue(deviceId,serviceId, characteristicId ){wx.readBLECharacteristicValue({// 这里的 deviceId 需要已经通过 createBLEConnection 与对应设备建立链接deviceId,// 这里的 serviceId 需要在 getBLEDeviceServices 接口中获取serviceId,// 这里的 characteristicId 需要在 getBLEDeviceCharacteristics 接口中获取characteristicId,success (res) {console.log('readBLECharacteristicValue:', res.errCode)}})},notifyBLECharacteristicValueChange(deviceId,serviceId, characteristicId ){var that = this;wx.notifyBLECharacteristicValueChange({state: true, // enable notifydeviceId,serviceId,characteristicId,success: (res) => {console.info('notifyBLECharacteristicValueChange success: ', res.errMsg)// read data here // 操作之前先监听,保证第一时间获取数据wx.onBLECharacteristicValueChange(function(res) {that.data.connected = true; console.info('onBLECharacteristicValueChange', res);console.info(`characteristic ${res.characteristicId} has changed, now is ${res.value}`);var result = res.value;var hex = utils.buf2hex(result);var _hex_ss = utils.hex2string(hex);console.info("hex: " + hex);console.info("string: " + _hex_ss);that.data.rece_string += _hex_ss;var recv_number_1 = that.data.recv_number + _hex_ss.length / 2;var recv_number = Math.round(recv_number_1);if( that.data.rece_string.includes("log:") && that.data.rece_string.includes(":end")){that.setData({recv_number: recv_number,recv_value: that.data.recv_value + that.data.rece_string,});console.info("string: " + that.data.rece_string);let buff = that.data.rece_string.split(':')console.log(buff)that.data.rece_string = ''let valueList = buff[1].split(',')that.data.recv_value = "";that.data.recv_number = 0;console.log(valueList)if(valueList.length == 4 ){that.setData({temphtValue: valueList[0],humidityValue: valueList[1],luxValue: valueList[2],srValue: valueList[3],});} } that.monitor_connected();}) },fail: (res) => {console.error('notifyBLECharacteristicValueChange fail: ', res)that.monitor_connected();}}) },monitor_connected_action(){var that = this;let deviceId = that.data.deviceId;wx.onBLEConnectionStateChange(function(res) {// 该方法回调中可以用于处理连接意外断开等异常情况console.log( "onBLEConnectionStateChange ----- " + `device ${res.deviceId} state has changed, connected: ${res.connected}`)if( res.deviceId == deviceId && res.connected == false ){ wx.closeBLEConnection({deviceId,success: (res) => {console.debug('detail: closeBLEConnection success', res); that.offBLEMonitor();that.createBLEConnection(deviceId, that.data.deviceName); },fail: (res) => { console.error('detail: closeBLEConnection fail', res); if (res.errCode === 10006) {that.offBLEMonitor();that.createBLEConnection(deviceId, that.data.deviceName); }}})that.setData({try_cnt: that.data.try_cnt + 1,})}else{that.data.try_cnt = 0;}}) },monitor_connected(){var that = this;setTimeout(that.monitor_connected_action, 200);},writeValue( val ) {// 向蓝牙设备发送一个0x00的16进制数据let buffer = new ArrayBuffer(1);let dataView = new DataView(buffer);dataView.setUint8(0, val);console.debug('getBLEDeviceCharacteristics - deviceId : ', this._deviceId)console.debug('getBLEDeviceCharacteristics - serviceId : ', this._serviceId)console.debug('getBLEDeviceCharacteristics - characteristicId: ', this._characteristicId)wx.writeBLECharacteristicValue({deviceId: this._deviceId,serviceId: this._serviceId,characteristicId: this._characteristicId,value: buffer,success: (res) => {console.debug('writeBLECharacteristicValue success', res); },fail: (res) => {console.error(' writeBLECharacteristicValue fail', res); this.setData({connected: false,}) }})},closeBluetoothAdapter() {wx.closeBluetoothAdapter({ success (res) {console.log(res)} })this.setData({connected: false,}), this._discoveryStarted = false},closeBLEConnection( deviceId ) {wx.closeBLEConnection({deviceId,success: (res) => {console.debug('detail: closeBLEConnection success', res); },fail: (res) => {console.error('detail: closeBLEConnection fail', res); }})this.setData({connected: false,canWrite: false,})},run_up:function(){var that = this;var val = 0x01 ;that.writeValue( val );}, run_down:function(){var that = this;var val = 0x02; that.writeValue( val ); },run_left:function(){var that = this;var val = 0x03; that.writeValue( val ); },run_right:function(){var that = this;var val = 0x04; that.writeValue( val );},run_stop:function(){var that = this;var val = 0x05;that.writeValue( val );},whiteLightValueSliderChange:function(e){var that = this;// 向蓝牙设备发送一个0x00的16进制数据var val = Math.random() * 255 | 0; that.writeValue( val ); },offBLEMonitor(){this.setData({connected: false,}), wx.offBLEPeripheralConnectionStateChanged();wx.offBLEConnectionStateChange();wx.offBLECharacteristicValueChange();wx.offBLEMTUChange();}
})2.2 下位机功能
代码第29行: 从UART读取一个byte
代码第30行:判断buff接收到的字符串是否越界
代码第38行:设置蓝牙控制命令
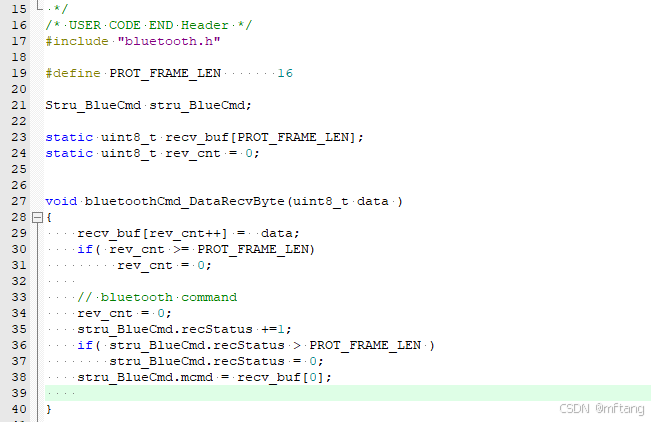
#include "bluetooth.h"#define PROT_FRAME_LEN 16Stru_BlueCmd stru_BlueCmd;static uint8_t recv_buf[PROT_FRAME_LEN];
static uint8_t rev_cnt = 0;void bluetoothCmd_DataRecvByte(uint8_t data )
{recv_buf[rev_cnt++] = data;if( rev_cnt >= PROT_FRAME_LEN)rev_cnt = 0;// bluetooth commandrev_cnt = 0;stru_BlueCmd.recStatus +=1;if( stru_BlueCmd.recStatus > PROT_FRAME_LEN )stru_BlueCmd.recStatus = 0;stru_BlueCmd.mcmd = recv_buf[0];}串口回调函数:
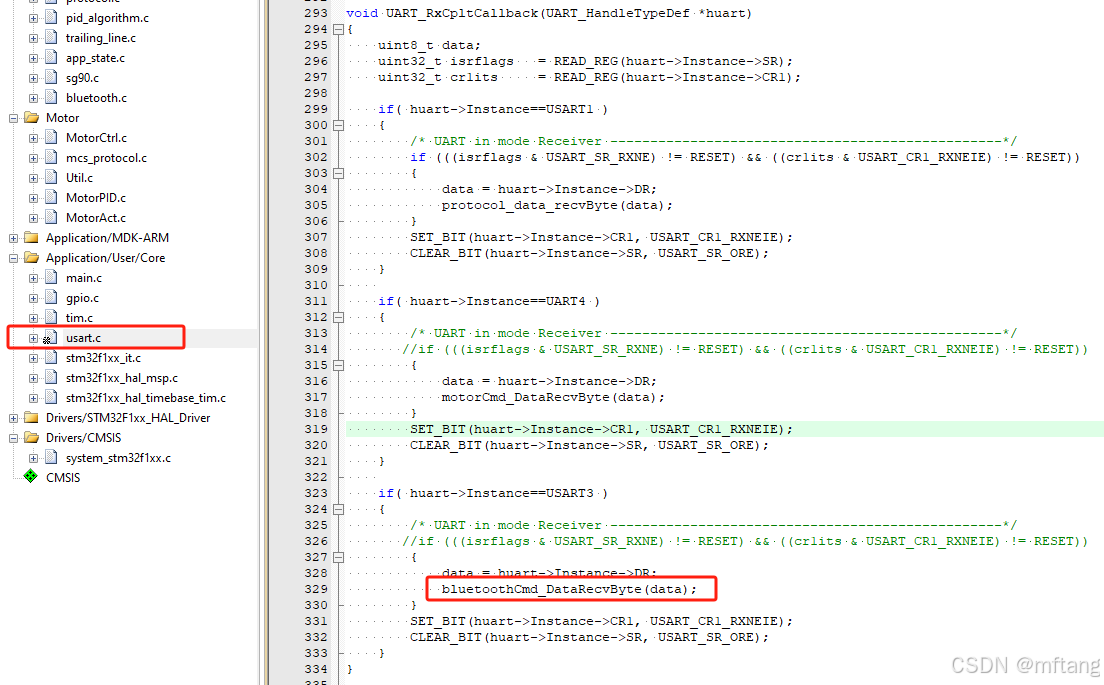
在void UART_RxCpltCallback(UART_HandleTypeDef *huart)函数调用该函数
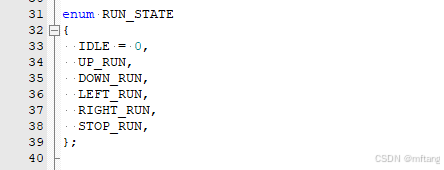
小车运动方向控制函数:
方向控制枚举定义
电机转动控制函数:
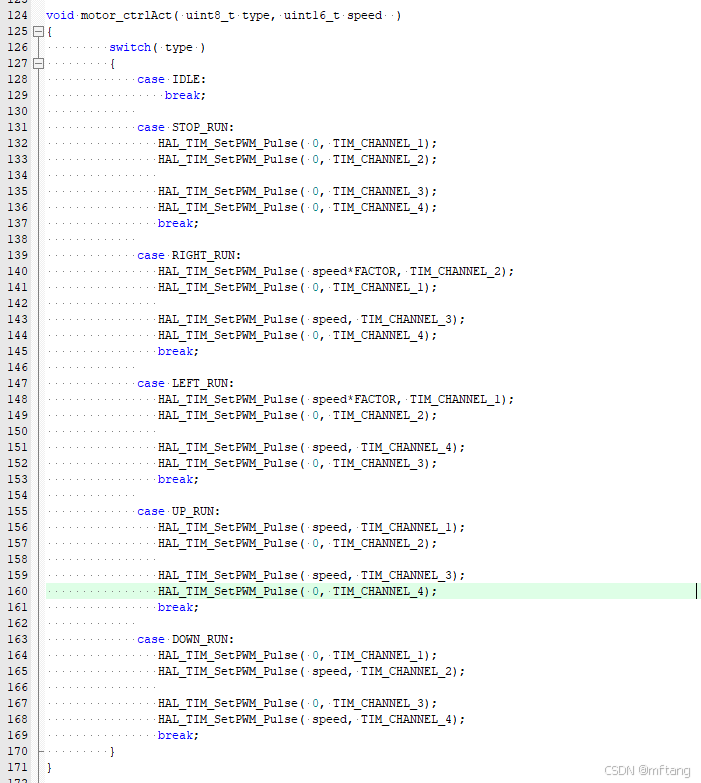
void motor_ctrlAct( uint8_t type, uint16_t speed )
{switch( type ){case IDLE:break;case STOP_RUN:HAL_TIM_SetPWM_Pulse( 0, TIM_CHANNEL_1);HAL_TIM_SetPWM_Pulse( 0, TIM_CHANNEL_2);HAL_TIM_SetPWM_Pulse( 0, TIM_CHANNEL_3);HAL_TIM_SetPWM_Pulse( 0, TIM_CHANNEL_4);break;case RIGHT_RUN:HAL_TIM_SetPWM_Pulse( speed*FACTOR, TIM_CHANNEL_2);HAL_TIM_SetPWM_Pulse( 0, TIM_CHANNEL_1);HAL_TIM_SetPWM_Pulse( speed, TIM_CHANNEL_3);HAL_TIM_SetPWM_Pulse( 0, TIM_CHANNEL_4);break;case LEFT_RUN:HAL_TIM_SetPWM_Pulse( speed*FACTOR, TIM_CHANNEL_1);HAL_TIM_SetPWM_Pulse( 0, TIM_CHANNEL_2);HAL_TIM_SetPWM_Pulse( speed, TIM_CHANNEL_4);HAL_TIM_SetPWM_Pulse( 0, TIM_CHANNEL_3);break;case UP_RUN:HAL_TIM_SetPWM_Pulse( speed, TIM_CHANNEL_1);HAL_TIM_SetPWM_Pulse( 0, TIM_CHANNEL_2);HAL_TIM_SetPWM_Pulse( speed, TIM_CHANNEL_3);HAL_TIM_SetPWM_Pulse( 0, TIM_CHANNEL_4);break;case DOWN_RUN:HAL_TIM_SetPWM_Pulse( 0, TIM_CHANNEL_1);HAL_TIM_SetPWM_Pulse( speed, TIM_CHANNEL_2);HAL_TIM_SetPWM_Pulse( 0, TIM_CHANNEL_3);HAL_TIM_SetPWM_Pulse( speed, TIM_CHANNEL_4);break;}
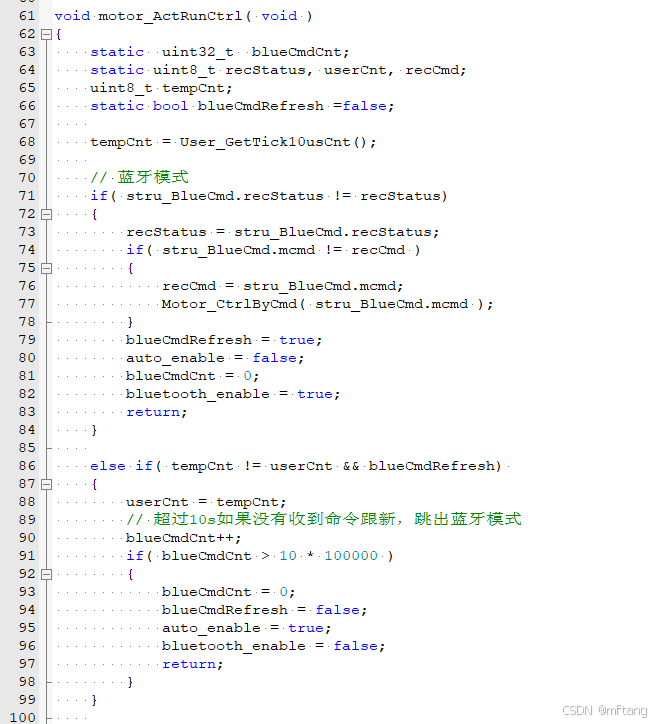
}蓝牙模块控制电机转动功能:
3 功能测试
3.1 小程序UI测试
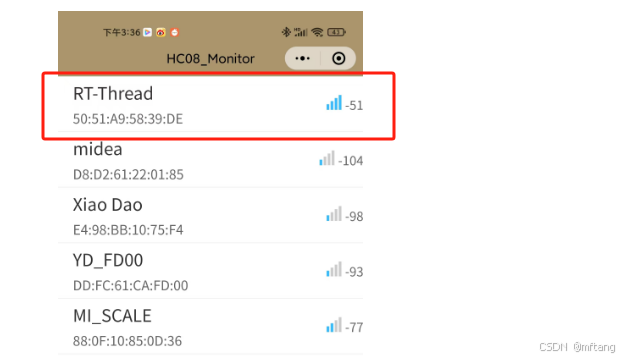
1) 手机扫描蓝牙模块信息
手机App上打开小程序,其会自动扫描蓝牙模块的信息
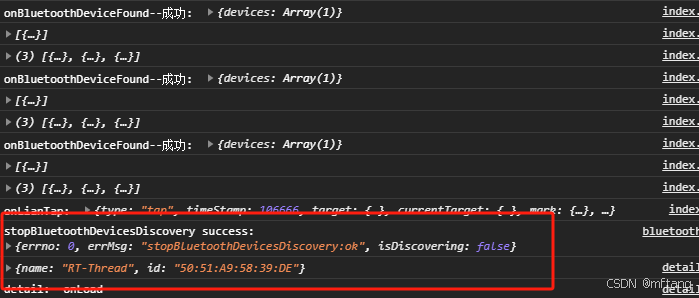
蓝牙模块连接成功,小程序会跳转到主控UI页面

同时,在调试接口上打印出连接成功的信息:
3.2 小车方向控制
通过小程序上的如下四个按钮控制小车的运行方向

系统硬件
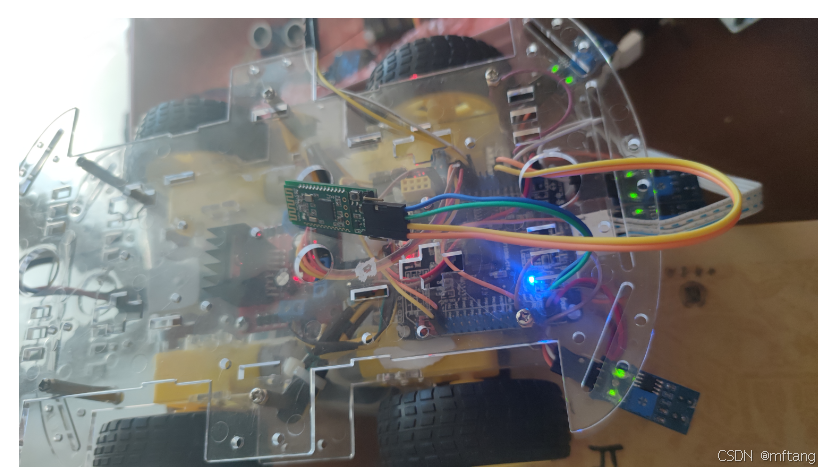
调试状态:

这篇关于微信小程序App实现小车方向控制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







