手眼专题

机械臂手眼标定方法详解
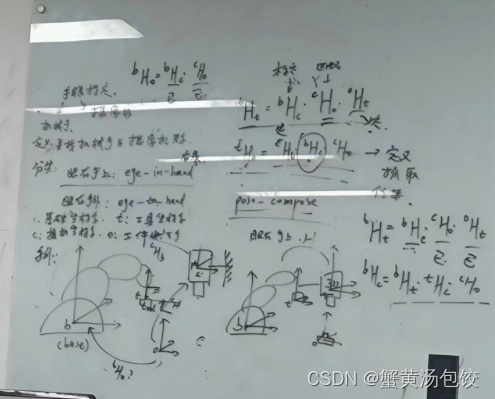
0 背景 为了使机械臂更好地完成任务, 通常会搭配摄像头等感知设备。 根据机械臂与摄像头的连接关系, 通常有2种模式, 一种是摄像头安装在机械臂上, 称为眼在手上(eye-on-hand), 另一种是摄像头不在机械臂上, 称为眼在手下(eye-off-hand)。眼在手上这种方式更常用, 因此本文主要讲解这种模式下的手眼标定方法。 1 手眼标定解决什么问题 标定目的是为了统一坐标系。摄像头检

眼在手上的手眼标定(matlab+python)实测精度±1mm
眼在手上的手眼标定(matlab+python)实测精度±1mm 原理网上有很多教程,提供一个参考,就不详细阐述了,这里主要记录一下手眼标定的过程和代码。源码:https://gitee.com/Tavox/hand-eye-calibrate 一、准备工作 材料准备:标定板、相机、机械臂;做相机标定,同时记录拍照位机械臂位姿(images/pos.txt),照片放在images下;(笔者提

Halcon 相机标定、手眼标定及机器人位姿矩阵的求解
1.相机内外参标定 标定目的:为了获得相机的内参(焦距、畸变系数等)和外参(从世界坐标系转换到摄像机坐标系的旋转矩阵和平移矩阵) 标定步骤: (1)相机固定,在放置物体的平面上放置halcon标定板; (2)拍摄标定板图像,拍摄要求如下图所示: (3)拍摄完毕后,打开halcon相机标定助手: (4)将第二步拍摄到的标定板图像输入,进行标定。 (5)点击标定,内外参即可标定完
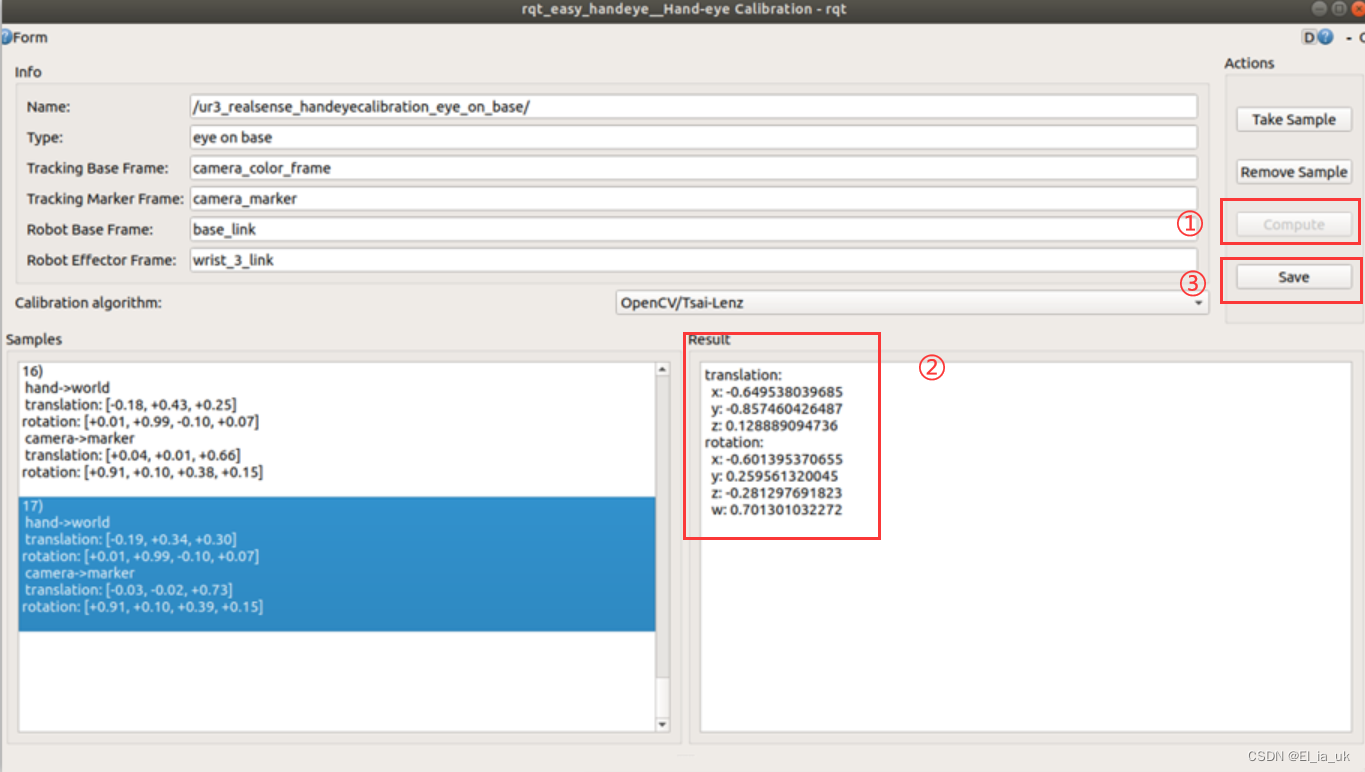
ROS 手眼标定 realsense435i+ur5e
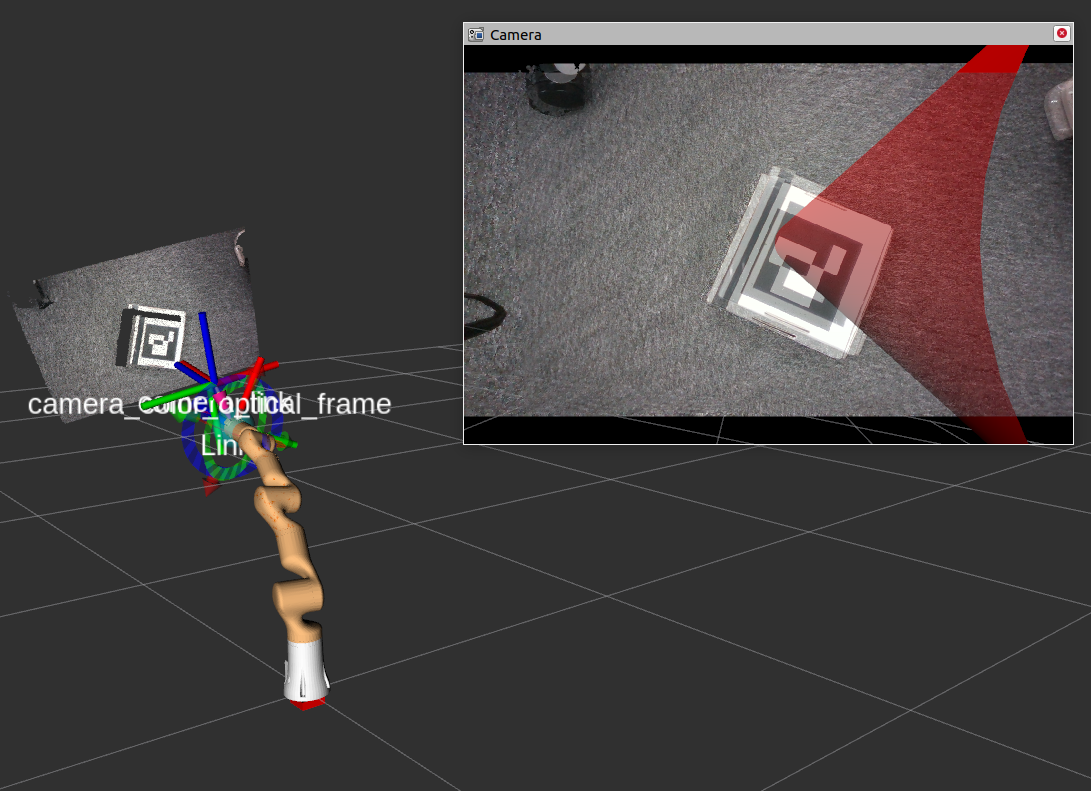
手眼标定的原理 基坐标系(base_tree)和相机(camera_tree)两个坐标系属于不同的tree,通过将标签贴到手上,相机识别出标签的position和orention,并通过easy_handeye标定包得到tool0(机械手),进一步得到相对于base的位置关系。即子坐标系(camera_rgb_optical_frame)到父坐标系(base_link)之间的关系。 对于手眼

手眼标定——九点标定
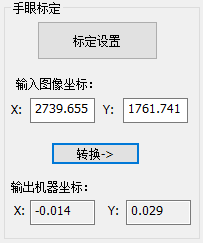
手眼标定:就是建立图像坐标系和 机器人坐标系之间的转化关系(转换矩阵) 图像坐标系:通俗的说就是图片上的坐标点 机器人坐标系:通俗的说就是机械手上的坐标点(二维平面,为什么是二维平面,读者们可以自己考虑一下) https://www.bilibili.com/video/BV1pz4y1Q7E1?from=search&seid=5794561712840399990 22.40 开始.2
8_手眼标定总结_auboi5机械臂与海康平面相机
经过不断地学习与调试,不断地学习网络上其他同志分享的资料,opencv手眼标定迎来了阶段性结束。实际测试结果在机械臂坐标系中X方向差5mm左右。 代码参考《https://blog.csdn.net/wanggao_1990/article/details/81435660》 注意事项: ①标定板占据相机视野1/3左右,否则找不到角点 ②代码未使用
会搭积木的AI,正在手眼并用地探索现实世界
春节假休完,北上广又开始上演小城妈宝惨变五环内社畜的惨剧。恢复到自己洗衣做饭收拾屋子的日子,年轻人们又深刻地感受到——科技不能改变生活,老妈才能。 人工智能虽然在各种游戏比赛中血虐人类,但在现实世界里却不能帮助人类“血虐”家务活。在研究更适用于复杂现实场景的机器人这件事上,我们一直在努力。 一般来说通过计算机视觉对外界进行感知,再结合数据模拟计算规划行动,是机器人训练研究的一个常见的方向

手眼标定的原理与实现
手眼标定的原理与实现 1、手眼标定原理部分2、手眼标定实现部分(眼在手上)3、提高精度的几个方向 1、手眼标定原理部分 手眼标定的核心问题在与求解AX=XB这个方程,只是针对于眼在手上和眼在手外时,A,B,X的定义略有差异。这篇文章的下面这张图很形象的说明了手眼标定中眼在手上的问题。 这篇文章很好地解释了手眼标定中眼在手上和眼在手外的问题。这篇文章是AX=XB这个方程的另外一种求
Ensenso手眼标定cpp实现
原理Ensenso SDK有介绍,这里是代码实现的简易版本。 需要修改serial number ,我的是194224。 使用方法: 将halcon标定板固定在机械臂上,运行代码,移动机械臂,输入机械臂上标定板当前的姿态(重复次数大于5即可) 成功的话,相机参数的link就已经被修改了,此时的坐标系统一为机械臂基座标系。 目前机械臂的移动是我手动控制的,也可以固定某些点输入,自动运行。

手眼标定(九点标定)
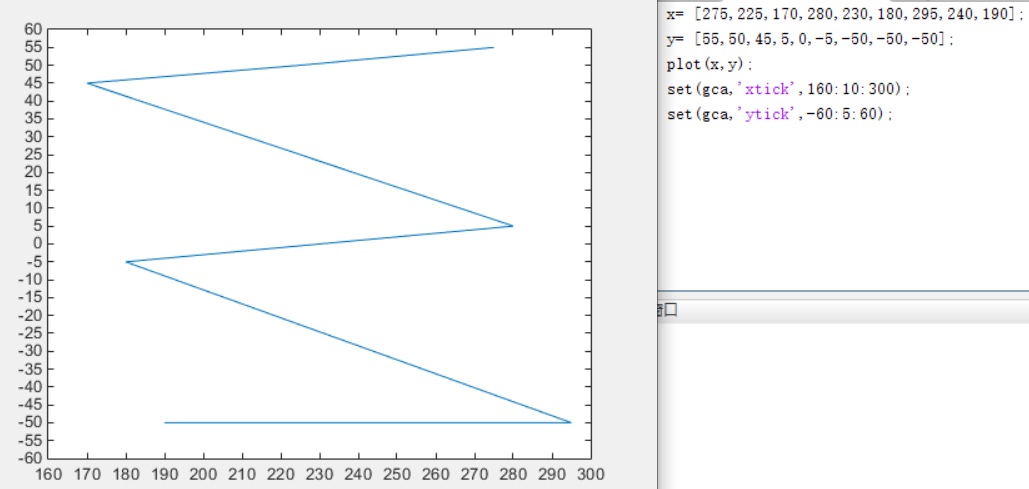
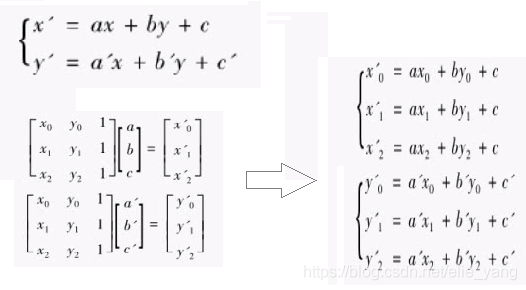
九点标定是图像行列、和坐标XY的仿射关系,也就是矩阵关系。目的是得到像素坐标系和空间机械手坐标系的坐标转化关系。 area_center(SortedRegions,Area,Row,Column) % Column_robot := [275,225,170,280,230,180,295,240,190] %机器人末端运动到9点的列坐标 Row_robot := [55,50,45
Halcon标定系列(4):一文详解手眼标定之九点法
所谓手眼系统,就是人眼镜看到一个东西的时候要让手去抓取,就需要大脑知道眼镜和手的坐标关系。如果把大脑比作B,把眼睛比作A,把手比作C,如果A和B的关系知道,B和C的关系知道,那么C和A的关系就知道了,也就是手和眼的坐标关系也就知道了。 相机知道的是像素坐标,机械手是空间坐标系,所以手眼标定就是得到像素坐标系和空间机械手坐标系的坐标转化关系。 在实际控制中,相机检测到目标在图像中的像素位置后,通

基于OpenCv的机器人手眼标定(九点标定法)《转载》
转载链接: 基于OpenCv的机器人手眼标定(九点标定法) 对于初学者而言,对相机的标定经常模糊不清。不知道机器坐标与相机坐标如何转换,两个坐标系又是如何建立? 我们通常是利用张氏标定法,针对于相机的畸变进行标定,利用校正得到的参数对图形进行处理后再呈现出来。这个方法网上用的人很多,资料也较为全面。这里就不做说明了。本文主要是针对机械手的手眼标定,一般而言目前相机的畸变较小,精度也较为准确,使
手眼标定(传统、SVD、九点) 原理及代码总结
目录 传统手眼标定感性认识: 传统手眼标定原理图: Eye in hand Eye to hand 传统手眼标定教学视频: 传统手眼标定代码: SVD手眼标定法原理: SVD求解数学原理: SVD手眼标定法代码: 九点标定法感性认识: 九点标定法代码: 九点标定法流程: 总结: 传统手眼标定感性认识:
Halcon+MFC实现手眼(九点)标定
相关源码下载:https://download.csdn.net/download/Stone_Wang_MZ/15008731 理论原理 图像坐标系与机器坐标系(包括机器人坐标、运动平台、激光振镜)建立关系后,在应用过程中只要知道相机视野中图像的某个坐标,即可知道对应的机器坐标。 我们知道建立两个平面之间的关系最少需要三个点,即三个点即可完成标定,叫九点标定只是因为为了提高精度,在项目中比
手眼标定 - 最终精度和误差优化心得
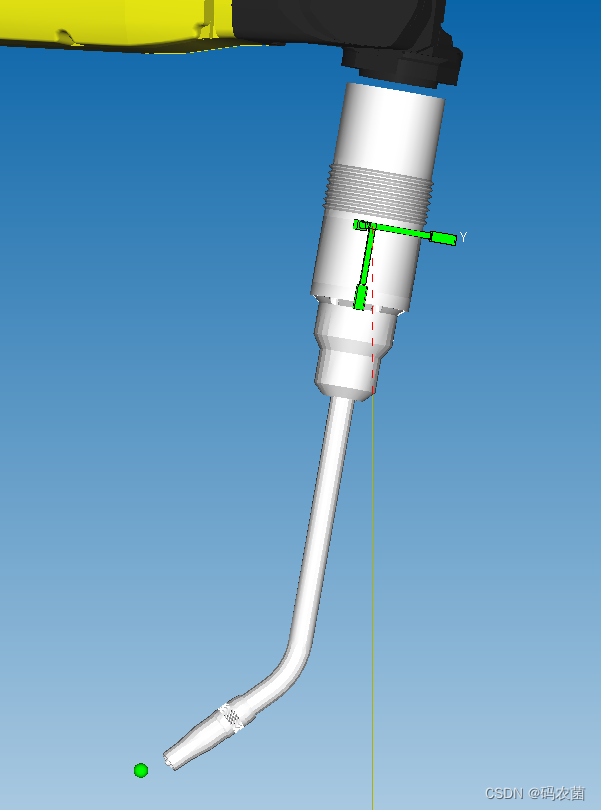
手眼标定 - 标定误差优化项 一、TCP标定误差优化1、注意标定针摆放范围2、TCP标定时的点次态与工作姿态尽可能保持相近 二、深度相机对齐矩阵误差1、手动计算对齐矩阵 三、手眼标定拍照姿态1、TCP标定姿态优先2、水平放置棋盘格优先 为减少最终手眼标定的误差,可做或注意以下步骤(环节)。 一、TCP标定误差优化 1、注意标定针摆放范围 如:在实际焊接、码垛等工作时,机械臂
手眼标定 - 最终精度和误差优化心得
手眼标定 - 标定误差优化项 一、TCP标定误差优化1、注意标定针摆放范围2、TCP标定时的点次态与工作姿态尽可能保持相近 二、深度相机对齐矩阵误差1、手动计算对齐矩阵 三、拍照姿态1、TCP标定姿态优先2、水平放置棋盘格优先 为减少最终手眼标定的误差,可做或注意以下步骤(环节)。 一、TCP标定误差优化 1、注意标定针摆放范围 如:在实际焊接、码垛等工作时,机械臂的工作

基于ROS的机械臂手眼标定-注意事项
基于ROS的机械臂手眼标定-注意事项 手眼标定的结果准确与否严重取决于数据的准确性。根据标定原理我们可以得知,输入数据由机械臂位姿和相机中标定板的位姿共同决定,接下来我们来讲一下如何提高标定结果的准确性的几个方向。 开源地址 github: https://github.com/aiotrobot/handeye-calib gitee: https://gitee.com/ohhuo/h


ABB机械臂手眼协作--空间点的坐标转换
最近在做钢筋捆扎的机器人,涉及到如何将相机中空间点的坐标转换到机械臂base坐标系下实现捆扎。 场景描述 我们采用eyeInhand的手眼方式,设置ABB机械臂的base坐标系与大地坐标系重合,钢筋捆扎操作面(竖直放置)与机械臂base坐标系的YOZ平面平行。机械臂工作场景示意图如下图 待求问题详细描述 已知空间中一点P,点P在3D点云相机坐标系中的坐标为Pc,拍照点机械臂的位姿为Tb
手眼/相机标定精度差|一起和小鱼读几篇经典相机标定论文吧
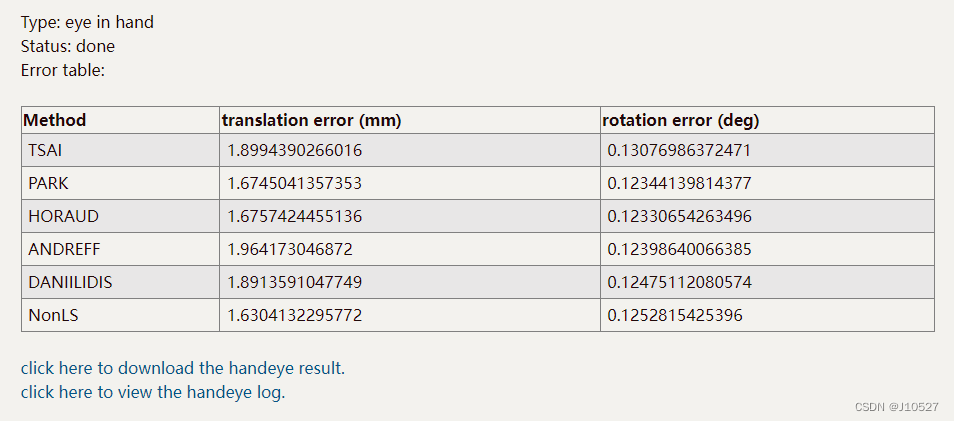
各位鱼粉大家早上好~我是早上被冻在床上起不来的小鱼,在这个寒冷的冬日里,小鱼哆哆嗦嗦的写文章,大家谁有时间可以给小鱼送送温暖,小鱼给你送几篇论文看! 为什么要给大家分享这几篇论文呢,是因为小鱼最近在工作中换了一个大视野的相机做手眼标定,最后发现标出来的数据精度最高才到3mm,实在是费了老半天的劲,还找不到问题在哪里? 最后还是怀疑到了相机的内参标定上,觉得是相机的内参标的不准才造成的这一系列后

嚼一嚼Halcon中的3D手眼标定
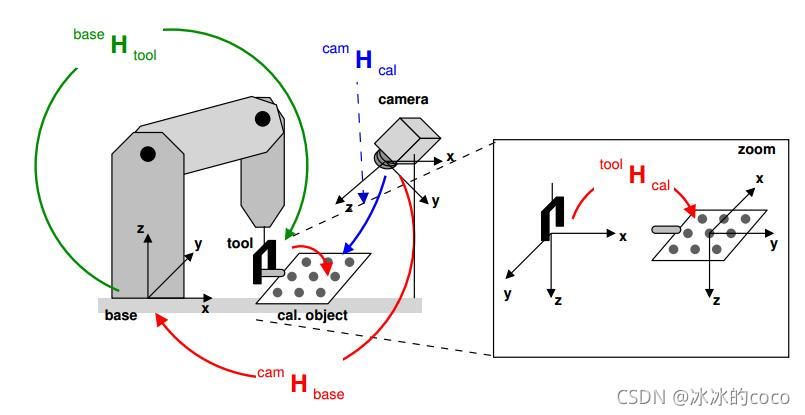
文章目录 一、问题概述1、何为手眼标定?2、手眼标定的2种形式1)眼在手上(eye in hand):即相机固定在机械臂末端2)眼在手外(eye to hand):即相机固定在机械臂以外的地方 3、手眼标定公式推导 二、Halcon例程解读1、初始化1)初始化显示参数2)初始化三维坐标系3)初始化标定模型 2、构建坐标系1)构建标定板坐标系2)构建机器人基座坐标系与夹具坐标系 3、执行手眼标