本文主要是介绍8_手眼标定总结_auboi5机械臂与海康平面相机,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
经过不断地学习与调试,不断地学习网络上其他同志分享的资料,opencv手眼标定迎来了阶段性结束。实际测试结果在机械臂坐标系中X方向差5mm左右。
代码参考《https://blog.csdn.net/wanggao_1990/article/details/81435660》
注意事项:
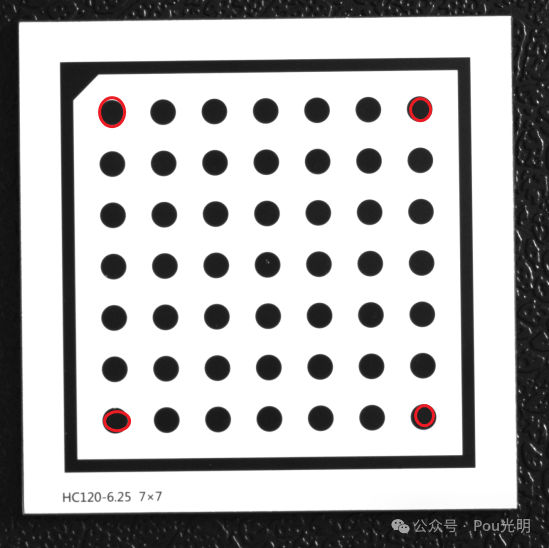
①标定板占据相机视野1/3左右,否则找不到角点
②代码未使用opencv的手眼标定接口
③需要注意图像标定角点的顺序,由于姿态关系,可能会旋转90度,导致结果异常
测试平台与道具:
①海康工业黑白相机
②遨博i5机械臂
③Ubuntu18.04 Qt组织代码
④圆网格标定板
⑤对位置用的尖端
一、opencv手眼标定
1、操作流程
为了验证流程,只采集了5张图片,第一张图片相机平行标定板,用于调整相机焦距,剩余4张分别前后左右稍稍改变相机姿态。每个姿态需采集海康相机图片(MVS软件获取)与机械臂位姿(sdk获取),机械臂位姿存取csv文件,之后我手动录入了xml文件中。
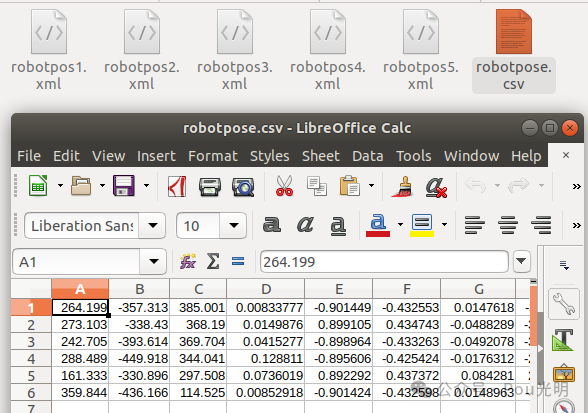
csv数据是机械臂基于base坐标系的位置、四元数姿态,欧拉角(ZYX)姿态。
第六行数据是标定板中心点对应机械臂位置,用于验证标定结果的手眼矩阵。
2、代码流程
①doCalibration()->runCalibration()->calibrateCamera()
如果看过之前的系列文章,再看代码,这块和网上是一致。得到相机内参和外参。
②readDatasFromFile()->attitudeVectorToMatrix()
Hg:机械臂齐次矩阵
Hc:相机外参齐次矩阵
③convertVectors2Hij()
// camera: A = A2*A1.inv(); robot: B = B2.inv()*B1
计算AX=BX中的A和B.
Hgij:机械臂的B
Hcij:相机的A
可以继续了解矩阵的左乘与右乘。
④computerHandEyeMatrix()
这块没看
⑤getWorldPos()
将像素坐标转为机械臂基坐标系下的映射。
这块也没看
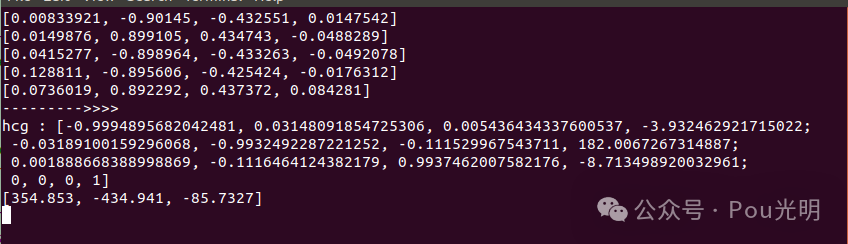
我的验证结果:
前面5行是机械臂的四元数姿态;
hcg是手眼矩阵;
最后一行是像素转为Word的结果,对比(359.844,-436.166);
获取图片像素我有一个单独程序;需要各部分加起来才是相对完整,这部分有
兴趣的同志可以自己搞下。
hcg是相机相对于末端tcp的位置和姿态,如果相机像识别标定板一样可以识
别出位置和姿态,那就是单目识别标识物实现2.5D的效果了。
其实后续还有要验证的:
1>械臂固定位姿,相机拍照模板匹配的像素精度
2>增加相机拍照图片数量,对比测试结果精度提升
3>标定姿态与使用姿态一致,应该可以增加精度
对这个6维的标定结果还需要进一步加深理解。
二、9点法标定
这个是计算两个平面坐标系的相对关系,有3个自由度:位置x和y,还有一个旋转角θ.
流程:
1>相机拍摄一张图片:
2>机械臂末端走4个位置与像素点对应
3>计算矩阵
机械臂用法兰尖端分别对了4个圆的中心。
测试程序如下:
//camera pixelcv::Mat A = (cv::Mat_(4, 3) <<1482, 579, 1,2221, 571, 1,2233, 1316, 1,1490, 1322, 1);// 4x3 //robot base pointcv::Mat B = (cv::Mat_(4, 3) <<412.918, -430.683, 1,365.714, -488.583, 1,307.422, -441.517, 1,354.509, -383.258, 1); cv::Mat X;cv::solve(A, B, X, CV_SVD);std::cout << "X=" << std::endl << X << std::endl; cv::Mat a1 = (cv::Mat_(1, 3) << 1370, 1450, 1.0);//352.412 -365.895 1370 1450//359.844 -436.166 1857 947cv::Mat b1 = a1*X;std::cout << "b1=" << std::endl << b1 << std::endl;std::cout << "真实值为:" << "359.844, -436.166, 1" << std::endl;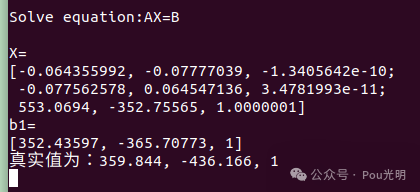
欢迎大家关注:
需要opencv手眼标定工程可在后台留言“opencv手眼标定工程”。
之前的过程在这里:
7_手眼标定_3_求解AX=XB理论
手眼标定问题排查_圆网格数据排查
手眼标定问题排查_1_棋盘格相机内参标定姿态数据
7_手眼标定_1_一个失败的流程记录
6_相机坐标系_相机4个坐标系详述
6_相机坐标系_1_相机标定概述
5_相机标定_3_calibrateCamera()例子
5_相机标定2_calibrateCamera()与内外参
5_相机标定_1_标定板选取与角点绘制
这篇关于8_手眼标定总结_auboi5机械臂与海康平面相机的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




