



相关文章

Python与DeepSeek的深度融合实战
《Python与DeepSeek的深度融合实战》Python作为最受欢迎的编程语言之一,以其简洁易读的语法、丰富的库和广泛的应用场景,成为了无数开发者的首选,而DeepSeek,作为人工智能领域的新星... 目录一、python与DeepSeek的结合优势二、模型训练1. 数据准备2. 模型架构与参数设置3
无人叉车3d激光slam多房间建图定位异常处理方案-墙体画线地图切分方案
墙体画线地图切分方案 针对问题:墙体两侧特征混淆误匹配,导致建图和定位偏差,表现为过门跳变、外月台走歪等 ·解决思路:预期的根治方案IGICP需要较长时间完成上线,先使用切分地图的工程化方案,即墙体两侧切分为不同地图,在某一侧只使用该侧地图进行定位 方案思路 切分原理:切分地图基于关键帧位置,而非点云。 理论基础:光照是直线的,一帧点云必定只能照射到墙的一侧,无法同时照到两侧实践考虑:关

韦季李输入法_输入法和鼠标的深度融合
在数字化输入的新纪元,传统键盘输入方式正悄然进化。以往,面对实体键盘,我们常需目光游离于屏幕与键盘之间,以确认指尖下的精准位置。而屏幕键盘虽直观可见,却常因占据屏幕空间,迫使我们在操作与视野间做出妥协,频繁调整布局以兼顾输入与界面浏览。 幸而,韦季李输入法的横空出世,彻底颠覆了这一现状。它不仅对输入界面进行了革命性的重构,更巧妙地将鼠标这一传统外设融入其中,开创了一种前所未有的交互体验。 想象

MiniGPT-3D, 首个高效的3D点云大语言模型,仅需一张RTX3090显卡,训练一天时间,已开源
项目主页:https://tangyuan96.github.io/minigpt_3d_project_page/ 代码:https://github.com/TangYuan96/MiniGPT-3D 论文:https://arxiv.org/pdf/2405.01413 MiniGPT-3D在多个任务上取得了SoTA,被ACM MM2024接收,只拥有47.8M的可训练参数,在一张RTX

SAM2POINT:以zero-shot且快速的方式将任何 3D 视频分割为视频
摘要 我们介绍 SAM2POINT,这是一种采用 Segment Anything Model 2 (SAM 2) 进行零样本和快速 3D 分割的初步探索。 SAM2POINT 将任何 3D 数据解释为一系列多向视频,并利用 SAM 2 进行 3D 空间分割,无需进一步训练或 2D-3D 投影。 我们的框架支持各种提示类型,包括 3D 点、框和掩模,并且可以泛化到不同的场景,例如 3D 对象、室

07 v-if和v-show使用和区别
划重点: v-ifv-show 小葱拌豆腐 <!DOCTYPE html><html lang="en"><head><meta charset="UTF-8"><meta name="viewport" content="width=device-width, initial-scale=1.0"><meta http-equiv="X-UA-Compatible" content="
Matter.js:Web开发者的2D物理引擎
Matter.js:Web开发者的2D物理引擎 前言 在现代网页开发中,交互性和动态效果是提升用户体验的关键因素。 Matter.js,一个专为网页设计的2D物理引擎,为开发者提供了一种简单而强大的方式,来实现复杂的物理交互效果。 无论是模拟重力、碰撞还是复杂的物体运动,Matter.js 都能轻松应对。 本文将带你深入了解 Matter.js ,并提供实际的代码示例,让你一窥其强大功能
AI和新基建赋能智慧工地超融合管理平台解决方案
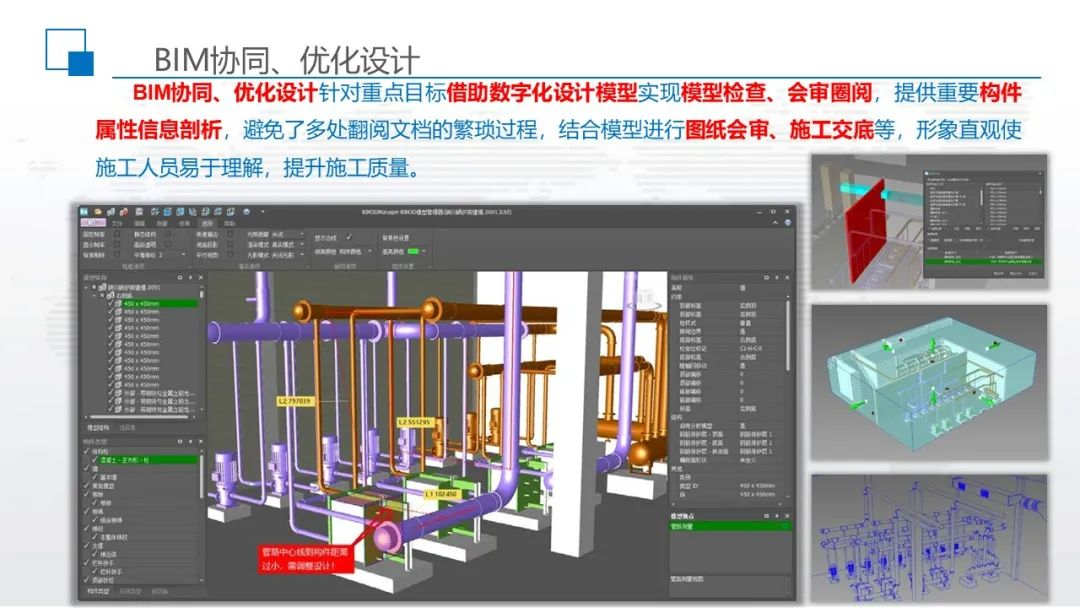
1. 项目背景与需求 电力行业的工程管理正朝着智慧化发展,但目前仍处于起步阶段。为满足数字化、网络化、智能化的发展需求,需要构建一个高效综合监控平台,实现对电力项目全过程的精益化管控。 2. 综合管理平台的构建 该平台集成了超融合实景监控、安全智能监测、公共安全防范、技术管理、人员管控和绿色施工等多个方面,通过BIM协同优化设计,提升项目质量和进度管理。 3. 安全智能监测的重要性 安全

解析apollo纵向控制标定表程序
百度apollo采用标定表描述车辆速度、加速度与油门/刹车之间的关系。该表可使无人车根据当前车速与期望加速度得到合适的油门/刹车开合度。除了文献《Baidu Apollo Auto-Calibration System - An Industry-Level Data-Driven and Learning based Vehicle Longitude Dynamic Calibrating

模具要不要建设3D打印中心
随着3D打印技术的日益成熟与广泛应用,模具企业迎来了自建3D打印中心的热潮。这一举措不仅为企业带来了前所未有的发展机遇,同时也伴随着一系列需要克服的挑战,如何看待企业引进增材制造,小编为您全面分析。 机遇篇: 加速产品创新:3D打印技术如同一把钥匙,为模具企业解锁了快速迭代产品设计的可能。企业能够迅速将创意转化为实体模型,缩短产品从设计到市场的周期,抢占市场先机。 强化定制化服务:面