本文主要是介绍手眼标定 - 最终精度和误差优化心得,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
手眼标定 - 标定误差优化项
- 一、TCP标定误差优化
- 1、注意标定针摆放范围
- 2、TCP标定时的点次态与工作姿态尽可能保持相近
- 二、深度相机对齐矩阵误差
- 1、手动计算对齐矩阵
- 三、拍照姿态
- 1、TCP标定姿态优先
- 2、水平放置棋盘格优先
为减少最终手眼标定的误差,可做或注意以下步骤(环节)。
一、TCP标定误差优化
1、注意标定针摆放范围
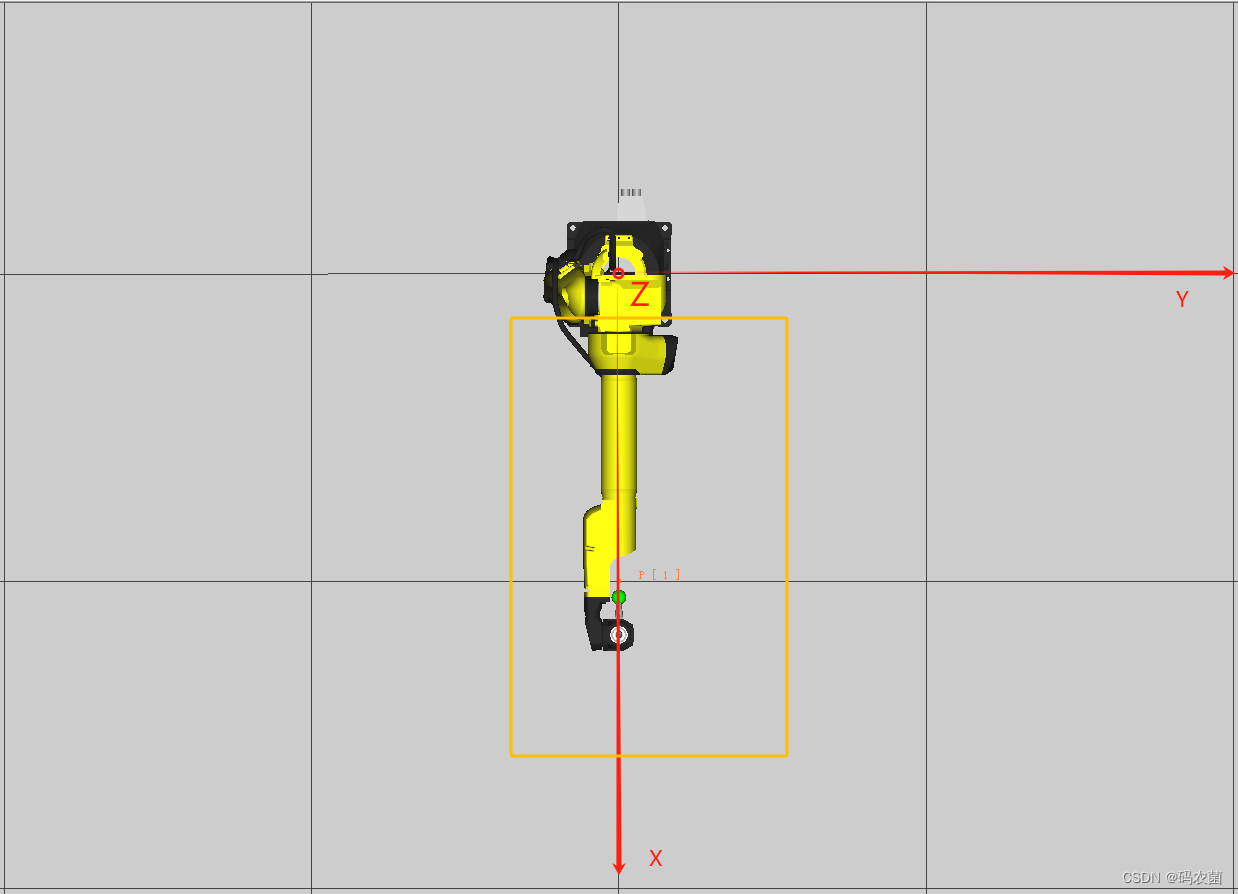
如:在实际焊接、码垛等工作时,机械臂的工作范围或摆动范围主要集中在X轴的`[150mm , 1500mm]`范围,Y轴的`[-150mm , 350mm]`范围,Z轴的`[-200mm , 600mm]`范围,那么在做TCP时,应将标定针(或标定点)摆放在X =(150 + 1500)/ 2 = 825mm 左右的位置,而不宜摆放在过于靠近最小值和最大值的附近。(Y轴和Z轴计算方式同理)
2、TCP标定时的点次态与工作姿态尽可能保持相近
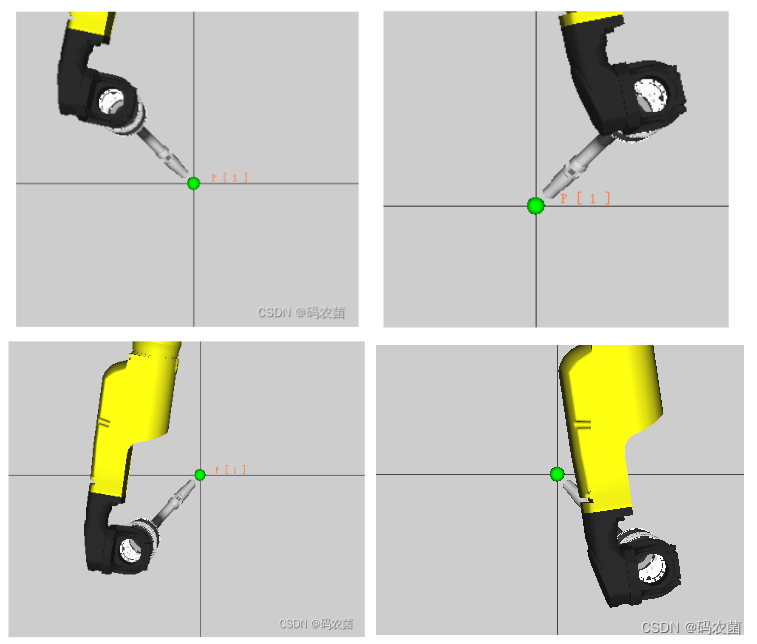
如:实际焊接时枪头与XY平面的夹角在[30-50]°之间,焊接的方向一般指向+X+Y、+X-Y、-X+Y、-X-Y,那么做TCP时的点位也应该与焊接时的姿态、夹角保持一致或相近。
二、深度相机对齐矩阵误差
1、手动计算对齐矩阵
市面上常见的深度相机一般有彩色点云和非彩色点云(深度点云),彩色点云和深度点云之间一般有对齐矩阵,该矩阵可通过上位机获取,但一般都不够精准。尽量自己计算。
方法: 同一位置下,分别进行彩色点云和深度点云拍照,然后将两点云进行配准,获取最终的配准矩阵,即我们自己计算出的对齐矩阵。然后重复N次,计算对齐矩阵的平均值(N越大,对齐矩阵精度越高)。
三、拍照姿态
1、TCP标定姿态优先
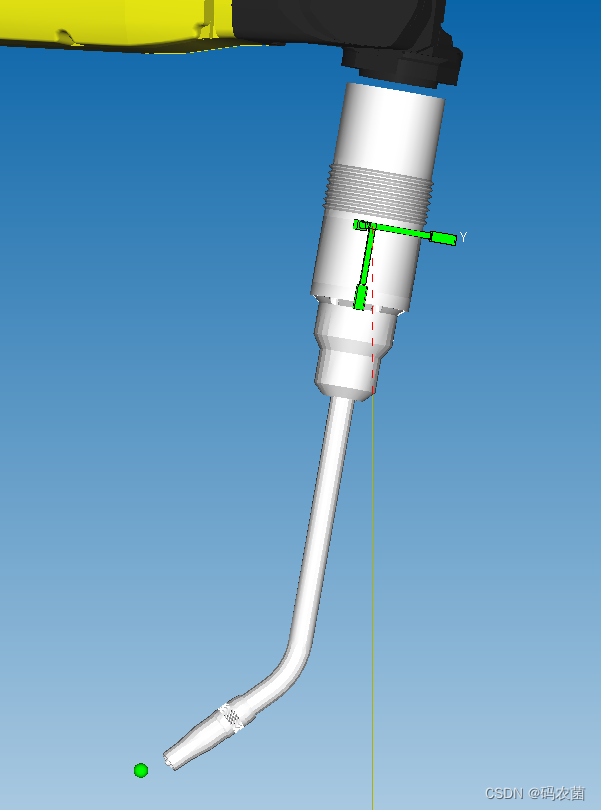
拍照姿态尽可能与做TCP标定时的姿态保持一致,如果相机无法拍到棋盘格,则将棋盘格倾斜放置。倾斜角度慢慢调整,直到焊枪接近TCP姿态且相机可以拍到棋盘格为最佳。
2、水平放置棋盘格优先
倾斜棋盘格一般只能让相机朝XY平面方向上的一个固定范围方向,并不能绕Z轴拍一圈,所以有局限性。所以可水平放置棋盘格,增加拍照次数:让相机调整至可拍到整个棋盘格的高度,然后绕Z轴360°都拍下,精度差的相机拍照次数最好在大几十次甚至100次以上。
这篇关于手眼标定 - 最终精度和误差优化心得的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


