本文主要是介绍手眼标定(传统、SVD、九点) 原理及代码总结,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
传统手眼标定感性认识:
传统手眼标定原理图:
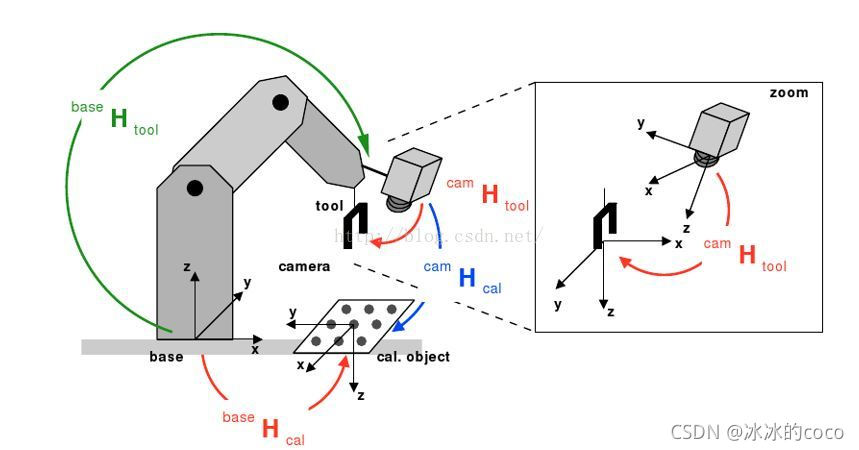
Eye in hand
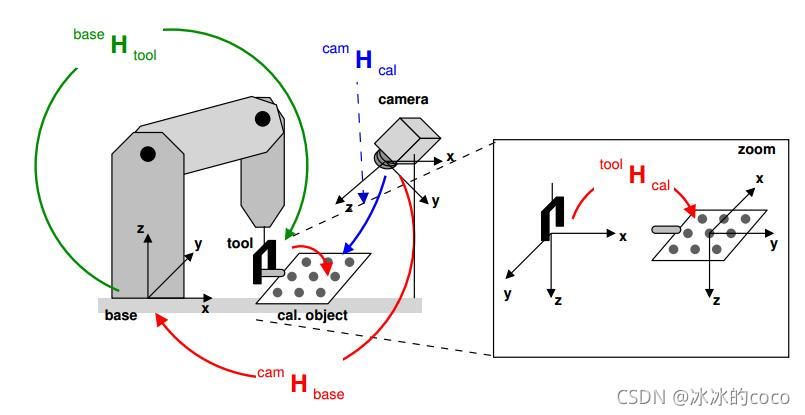
Eye to hand
传统手眼标定教学视频:
传统手眼标定代码:
SVD手眼标定法原理:
SVD求解数学原理:
SVD手眼标定法代码:
九点标定法感性认识:
九点标定法代码:
九点标定法流程:
总结:
传统手眼标定感性认识:
相机标定(一):机器人手眼标定 - 知乎
传统手眼标定原理图:
Eye in hand
Eye to hand
传统手眼标定教学视频:
手眼标定—原理与实战(上篇)_哔哩哔哩_bilibili
手眼标定原理与实战(下篇)_哔哩哔哩_bilibili
传统手眼标定代码:
利用 `calibrateHandeye()` 函数
OpenCV手眼标定(calibrateHandeye())_hello-CSDN博客_opencv手眼标定
SVD手眼标定法原理:
相机标定(三)——手眼标定_偷得浮生半日闲-CSDN博客_相机手眼标定
SVD求解数学原理:
SVD分解(奇异值分解)求旋转矩阵_Bryan_Zhang的专栏-CSDN博客_svd求解旋转平移矩阵
SVD手眼标定法代码:
#SVD分解手眼标定法
def rigidTransform3d(A, B):#整理传入数据形状A = np.mat(np.array(A).reshape(9, 3))B = np.mat(np.array(B).reshape(9, 3))assert len(A) == len(B)N = A.shape[0]#对十个数据取平均值mu_A = np.mean(A, axis=0) mu_B = np.mean(B, axis=0)#对数据减去均值(中心点)AA = A - np.tile(mu_A, (N, 1)) BB = B - np.tile(mu_B, (N, 1))#计算矩阵HH = np.transpose(AA) * BB # H = A.T * B#SVD分解U, S, Vt = np.linalg.svd(H) #计算旋转矩阵rotationMatrix = Vt.T * U.T # R = V * U.T#反射矩阵检测if np.linalg.det(self.__rotationMatrix) < 0:print("Reflection detected")Vt[2, :] *= -1rotationMatrix = Vt.T * U.T#计算平移矩阵translationMatrix = -rotationMatrix * mu_A.T + mu_B.Treturn rotationMatrix, translationMatrix九点标定法感性认识:
手眼标定(九点法)_黄昏的晨曦-CSDN博客_手眼标定
理解什么是仿射变换:
刚体变换和仿射变换的区别_w_weixiaotao的博客-CSDN博客_刚体变换和仿射变换
九点标定法代码:
#利用像素坐标和机械手坐标(至少三个点)得到仿射矩阵,完成像素坐标到机械手坐标的转换
#origin_points_set 标定板像素坐标点集
#target_points_set 机械手抓取坐标点集
import cv2
cv2.estimateAffine2D(origin_points_set, target_points_set)
九点标定法流程:
Eye in hand方案 、九点标定法
首先,将机械手移到标定板正上方
然后,通过相机得到九个检测点在相机坐标系下的坐标p_camera
最后,让机械手末端依次触碰九个检测点,得到检测点在机械手坐标系下的坐标p_base
将得到的九组点分别做成A, B列表,传入函数就可以得到R,T矩阵啦
总结:
九点标定法只能识别x,y坐标,属于2D平面标定,在标定过程中z是未知的(需要自己确定)
如果需要实现3D抓取,需要进行传统手眼标定(棋盘格标定)或者SVD手眼标定法
SVD手眼标定法可以实现3D标定,但是在标定的时候要知道深度信息(z是已知的)
实际使用中发现九点标定法最准确
SVD和传统方法会存在一定精度问题,一般作为迭代法的初始解提高精度
这篇关于手眼标定(传统、SVD、九点) 原理及代码总结的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




