九点专题
偏微分方程算法之九点紧差分法
目录 一、研究目标 二、理论推导 三、算例实现 四、结论 一、研究目标 我们已经在专栏中介绍了椭圆型偏微分方程的五点菱形差分格式,这里我们继续以该方法为背景,探讨如何提高五点法的精度,即从二阶精度提升到四阶精度。 研究目标现继续以矩形区域内的Poisson方程的边值问题: 二、理论推导 提高差分格式精度的一种有效方法是紧差分

手眼标定——九点标定
手眼标定:就是建立图像坐标系和 机器人坐标系之间的转化关系(转换矩阵) 图像坐标系:通俗的说就是图片上的坐标点 机器人坐标系:通俗的说就是机械手上的坐标点(二维平面,为什么是二维平面,读者们可以自己考虑一下) https://www.bilibili.com/video/BV1pz4y1Q7E1?from=search&seid=5794561712840399990 22.40 开始.2

作文题目九点微博曝光 网友质疑其来源可疑
天,高考自然成为微博上的热门话题。记者登录微博看到,从考前几天开始,就不断有猜题和预测高考的内容出现,语文作文题是最受关注的。而今年广东高考语文作文题《回到原点》竟然在今天上午9时就出现在微博上。 作文题很多人猜“幸福” 在微博上,猜高考作文题俨然成为一种娱乐。微博用户@卢俊夫没那么简单说:“高级机密!今年广东高考作文‘一起有走过的路’为话题的自命题作文。”用户@轩言月光版说得

引入精益管理方式,需要提前做到这九点
精益管理方式也叫精益生产方式,最早由美国生产管理专家从丰田公司的管理实践中总结而来,它是一种被实践证明了的科学管理理念,并逐渐被越来越多的企业学习和借鉴。 1996年,James P.Womack和Daniel T.Jones在《改变世界的机器》的基础上,发表了《精益思想》一书,该书把精益生产进行理论化,并系统地描述了精益的原则和方法,形成了精益的思想体系。 随着精益管理方式掀起的学习热潮,许多

halcon 九点标定
一、简介 相机的标定方式:九点标定是最常用的标定方法,比较简单,但是有四种方式,最长用的任然是正拍的,所以其他的暂时不介绍,等到用到之后在说。 二、原理推导 点的仿射变换 * Image Acquisition 01: Code generated by Image Acquisition 01* Image Acquisition 01: Code generated by I
手眼标定(九点标定)
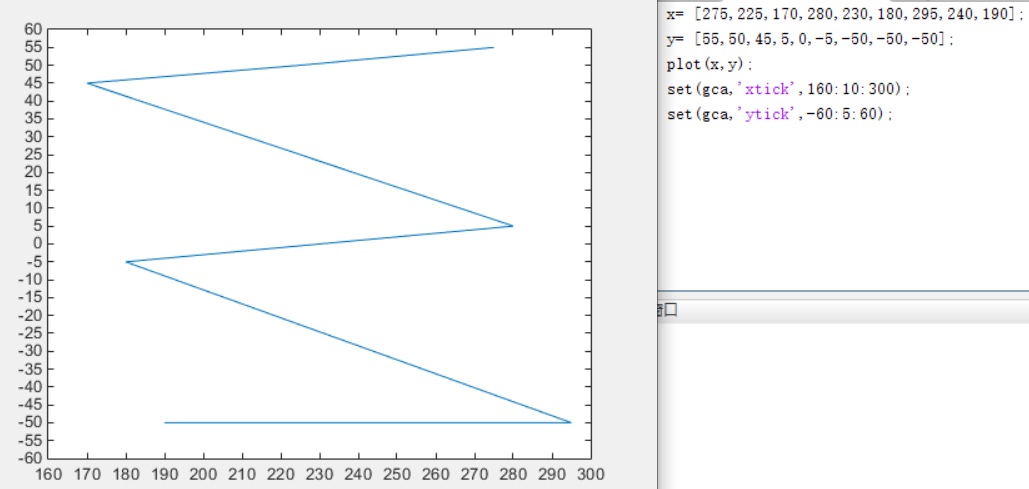
九点标定是图像行列、和坐标XY的仿射关系,也就是矩阵关系。目的是得到像素坐标系和空间机械手坐标系的坐标转化关系。 area_center(SortedRegions,Area,Row,Column) % Column_robot := [275,225,170,280,230,180,295,240,190] %机器人末端运动到9点的列坐标 Row_robot := [55,50,45
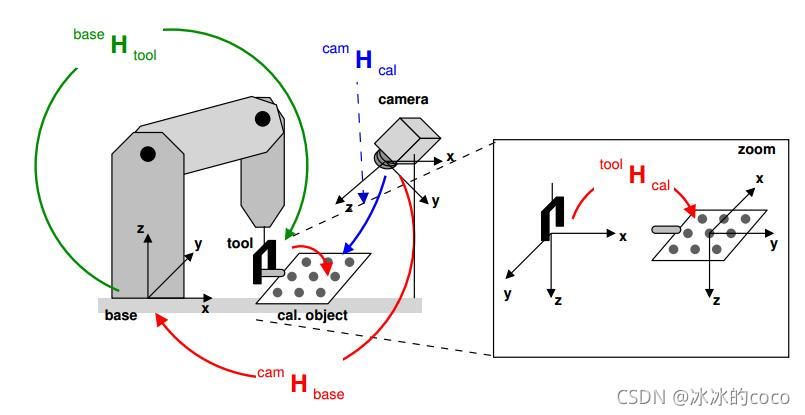
Halcon标定系列(4):一文详解手眼标定之九点法
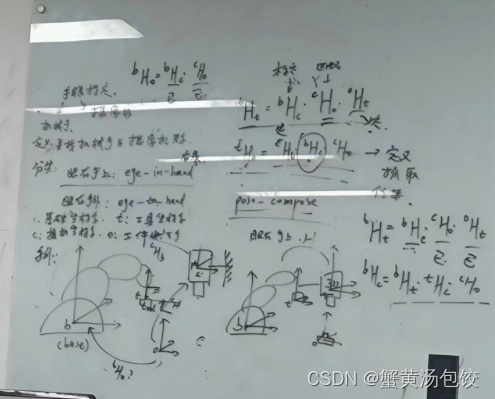
所谓手眼系统,就是人眼镜看到一个东西的时候要让手去抓取,就需要大脑知道眼镜和手的坐标关系。如果把大脑比作B,把眼睛比作A,把手比作C,如果A和B的关系知道,B和C的关系知道,那么C和A的关系就知道了,也就是手和眼的坐标关系也就知道了。 相机知道的是像素坐标,机械手是空间坐标系,所以手眼标定就是得到像素坐标系和空间机械手坐标系的坐标转化关系。 在实际控制中,相机检测到目标在图像中的像素位置后,通
海康VisionMaster配合机械手九点标定
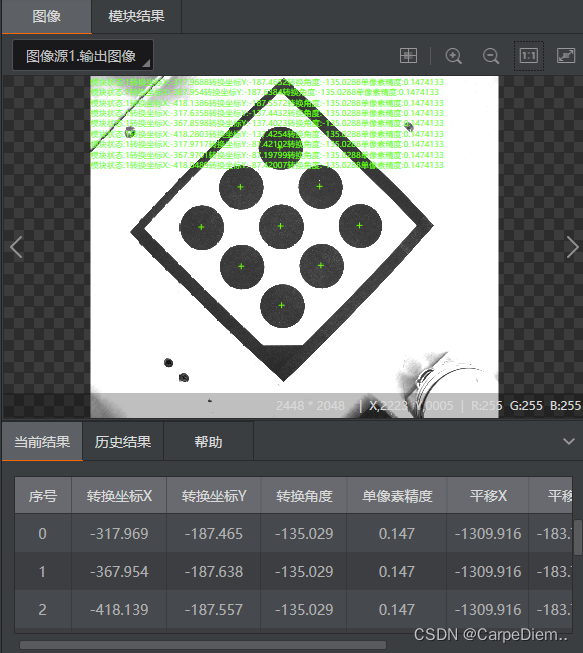
文章目录 一、图像源二、标定板标定三、N点标定四、标定转换总结 一、图像源 添加图像源,在图像源里添加标定板图片 二、标定板标定 拖入标定板标定 右键点击标定板标定,在运行参数里修改–物理尺寸(圆板两个相邻圆心的圆心距,单位是mm),标定板类型我们选择圆标定板,完事执行一下,这样我们九个点的圆心点就出来了 三、N点标定 拖入N点标定,用的标定板是九个点,所以平移

基于OpenCv的机器人手眼标定(九点标定法)《转载》
转载链接: 基于OpenCv的机器人手眼标定(九点标定法) 对于初学者而言,对相机的标定经常模糊不清。不知道机器坐标与相机坐标如何转换,两个坐标系又是如何建立? 我们通常是利用张氏标定法,针对于相机的畸变进行标定,利用校正得到的参数对图形进行处理后再呈现出来。这个方法网上用的人很多,资料也较为全面。这里就不做说明了。本文主要是针对机械手的手眼标定,一般而言目前相机的畸变较小,精度也较为准确,使
手眼标定(传统、SVD、九点) 原理及代码总结
目录 传统手眼标定感性认识: 传统手眼标定原理图: Eye in hand Eye to hand 传统手眼标定教学视频: 传统手眼标定代码: SVD手眼标定法原理: SVD求解数学原理: SVD手眼标定法代码: 九点标定法感性认识: 九点标定法代码: 九点标定法流程: 总结: 传统手眼标定感性认识:
Halcon+MFC实现手眼(九点)标定
相关源码下载:https://download.csdn.net/download/Stone_Wang_MZ/15008731 理论原理 图像坐标系与机器坐标系(包括机器人坐标、运动平台、激光振镜)建立关系后,在应用过程中只要知道相机视野中图像的某个坐标,即可知道对应的机器坐标。 我们知道建立两个平面之间的关系最少需要三个点,即三个点即可完成标定,叫九点标定只是因为为了提高精度,在项目中比
OpenCv 九点标定不准确的问题
1,物理条件 如图所示,X Y 为分离轴,相机固定在X轴上,载台固定在Y轴上,产品放在载台上,产品对角上有mark点,用相机识别mark点,获取mark点的像素坐标和轴的xy坐标,数据如下: std::vector<cv::Point2f> camera;std::vector<cv::Point2f> robot;camera.push_back(cv::Point2f(153.5
![肆[4],九点标定,函数VectorToHomMat2d/AffineTransPoint2d](/front/images/it_default2.jpg)
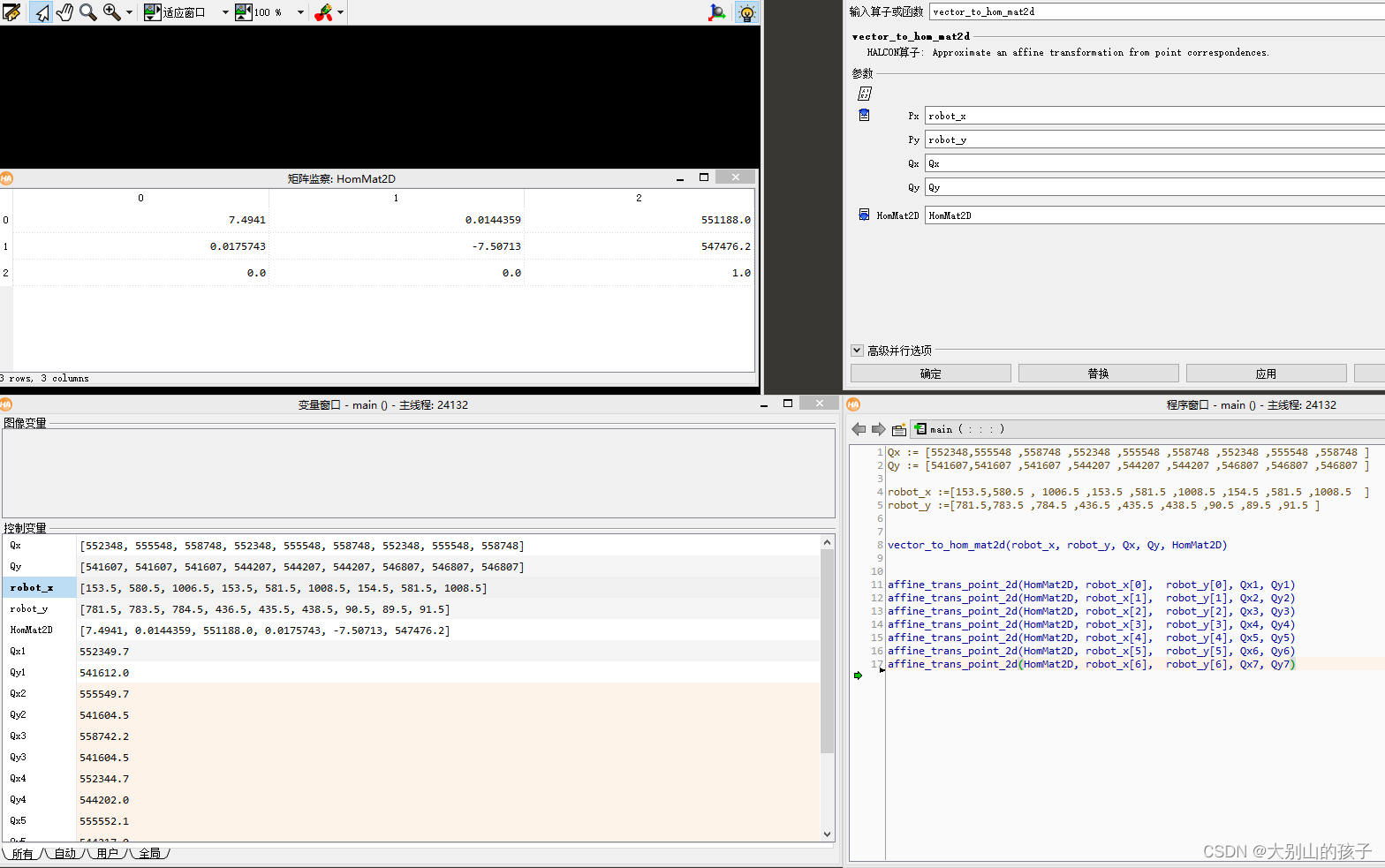
肆[4],九点标定,函数VectorToHomMat2d/AffineTransPoint2d
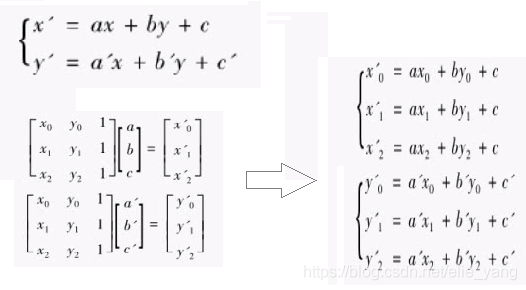
函数VectorToHomMat2d 函数功能 计算仿射变换矩阵 C++形式 LIntExport void VectorToHomMat2d(const HTuple& Px, const HTuple& Py, const HTuple& Qx, const HTuple& Qy, HTuple* HomMat2D);//参数1:图像坐标X数组//参数2:图像坐标Y数组/

给程序员们提的九点建议(都在读)
往期文章 第一章:日常_JAVA_面试题集1(含答案) 第二章:日常_JAVA_面试题集2(含答案) 第八章:日常_JAVA_面试题集8(含答案) 第九章:日常_JAVA_面试题集9(含答案) 日常_JAVA_面试宝典多线程汇总(含答案) 往期文章大全…… 给程序员们提的九点建议(都在读) 前言给程序员提的9点建议 总结 前言 作为一个真正的程序员,首先应该尊