本文主要是介绍海康VisionMaster配合机械手九点标定,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 一、图像源
- 二、标定板标定
- 三、N点标定
- 四、标定转换
- 总结
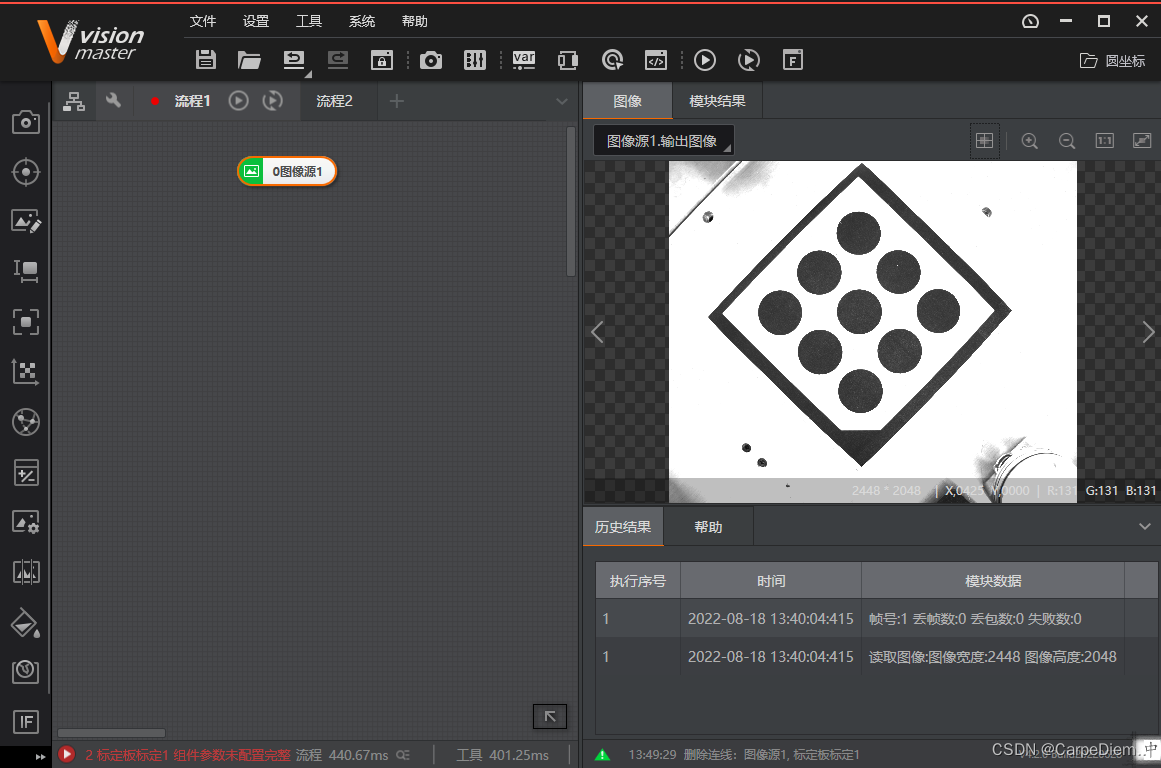
一、图像源
添加图像源,在图像源里添加标定板图片
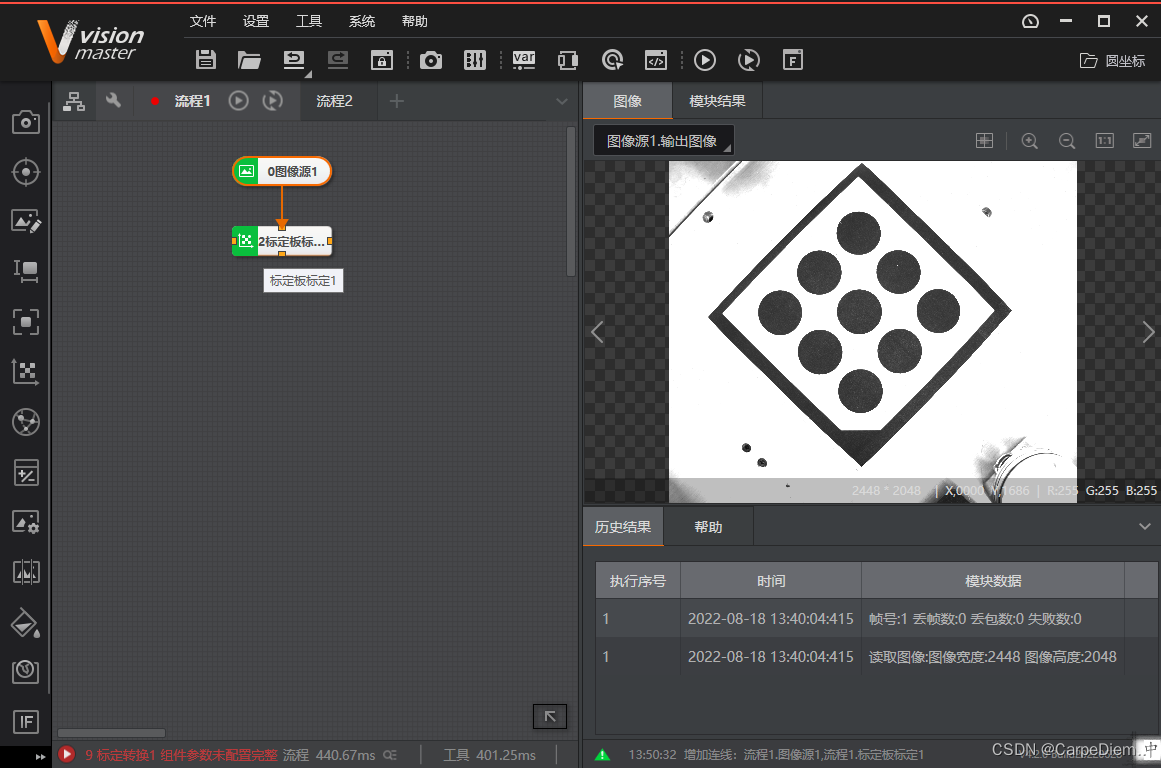
二、标定板标定
拖入标定板标定
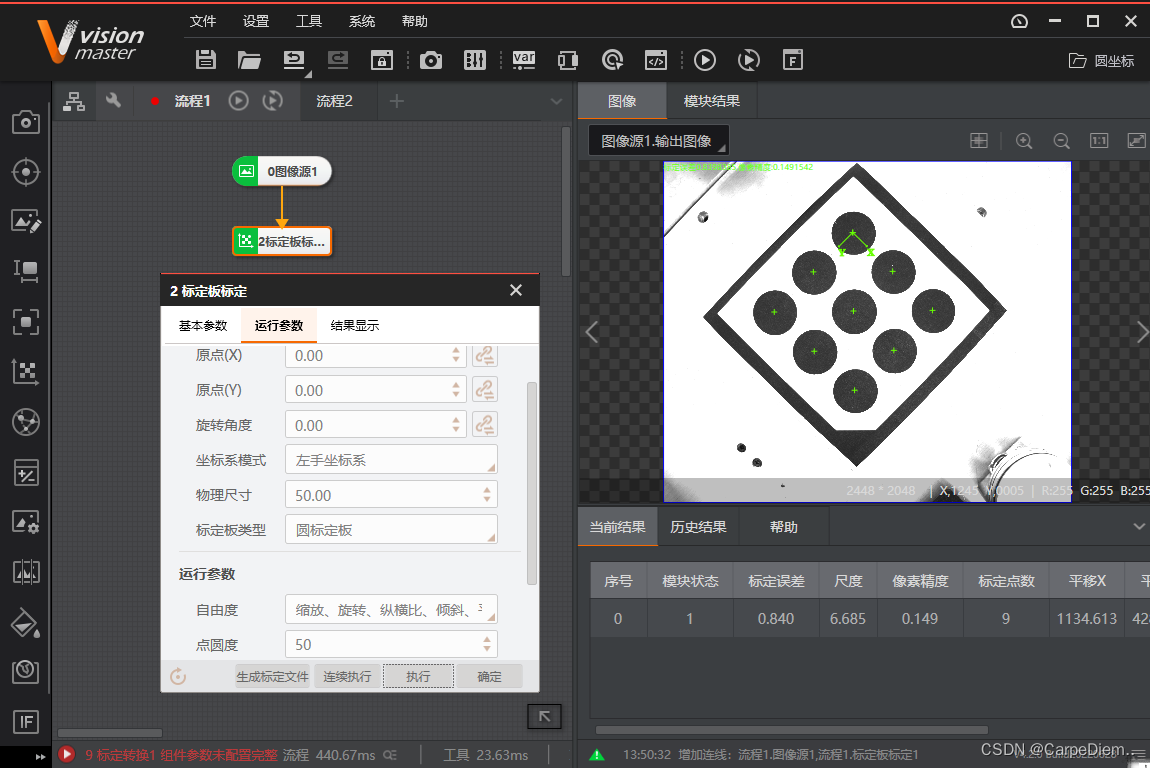
右键点击标定板标定,在运行参数里修改–物理尺寸(圆板两个相邻圆心的圆心距,单位是mm),标定板类型我们选择圆标定板,完事执行一下,这样我们九个点的圆心点就出来了
三、N点标定
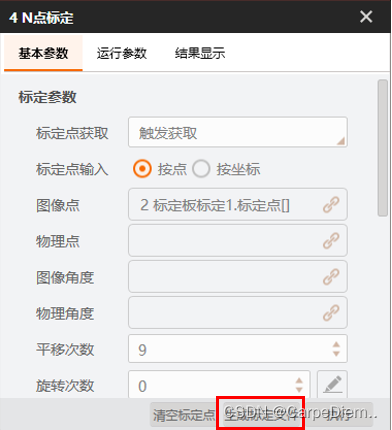
拖入N点标定,用的标定板是九个点,所以平移次数不用改,旋转次数改成“0”
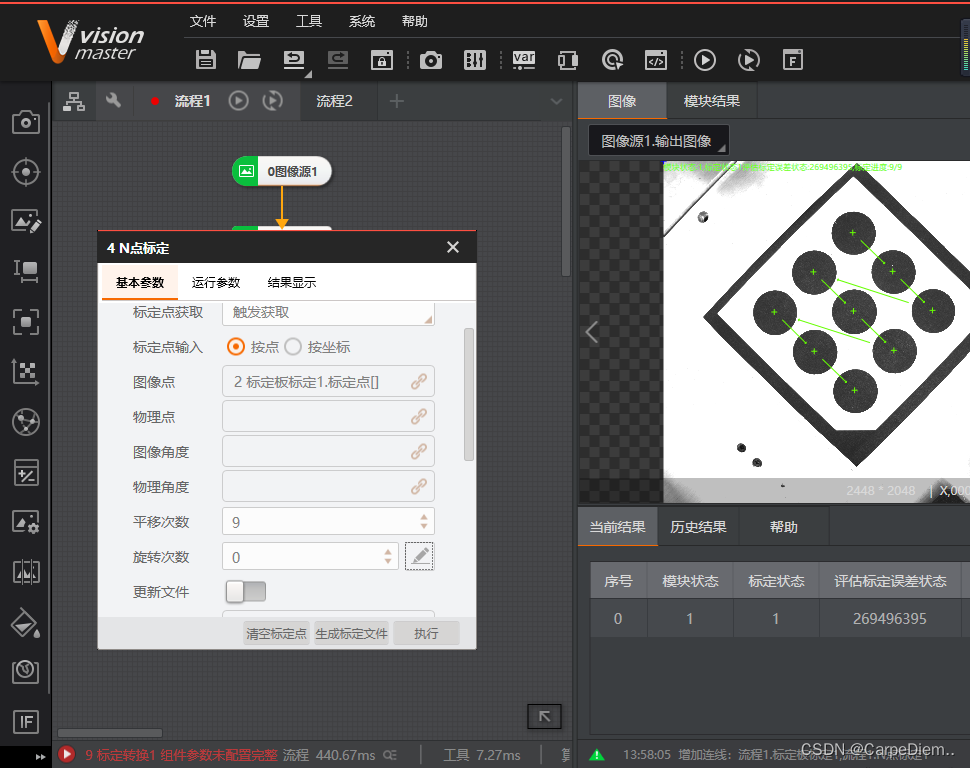
点击【铅笔图案】

手动输入我们已经用机械手走好的九个坐标输入在物理坐标里

执行,获取我们要的结果。
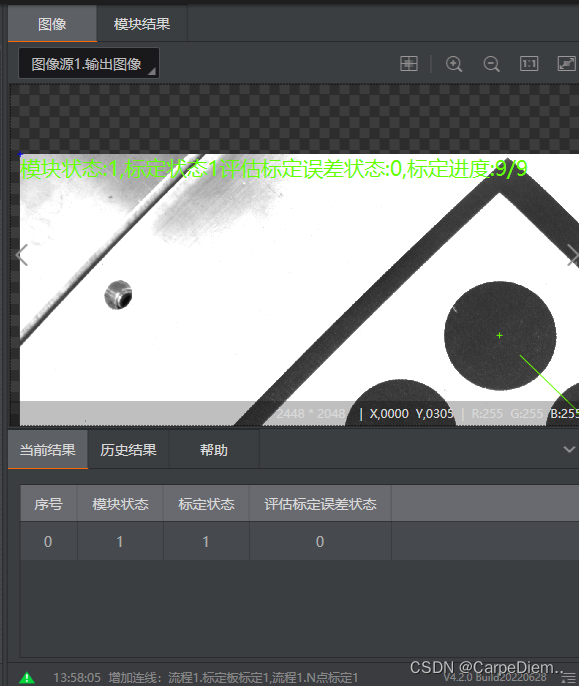
在模块结果里我们可以看见评估标定误差状态"0"证明没有问题,下面也可以看见平移像素平均误差(最好小于0.5效果最佳),因为我们标定板是A4纸打印的可能存在翘曲,走的点位也不一定非常准确,所以存在一定误差

最后点击标定生成文件,保存数据
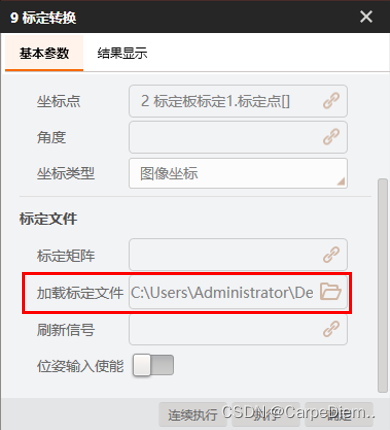
四、标定转换
测试我们之前标定的结果,添加标定转换
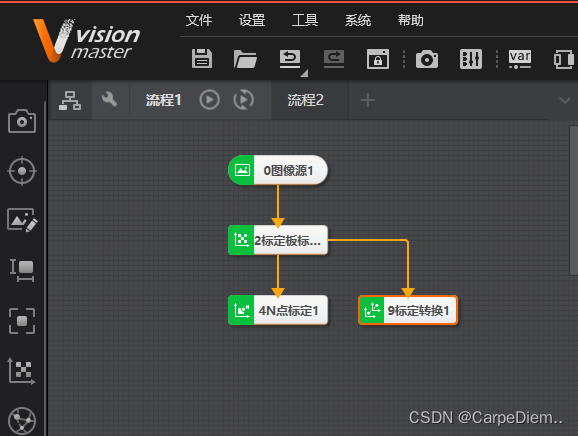
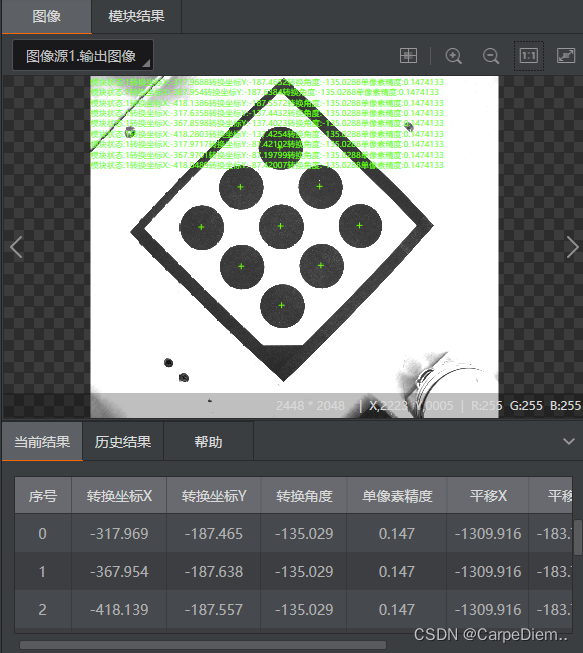
图像源设置为标定板图片,坐标点选择,标定板标定的圆心点,加载我们上面生成的标定文件

执行一下,就可以得到九个点的坐标结果
总结
以上就是VisionMaster4.2.0配合机械手九点标定的操作流程。
这篇关于海康VisionMaster配合机械手九点标定的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!