机械手专题

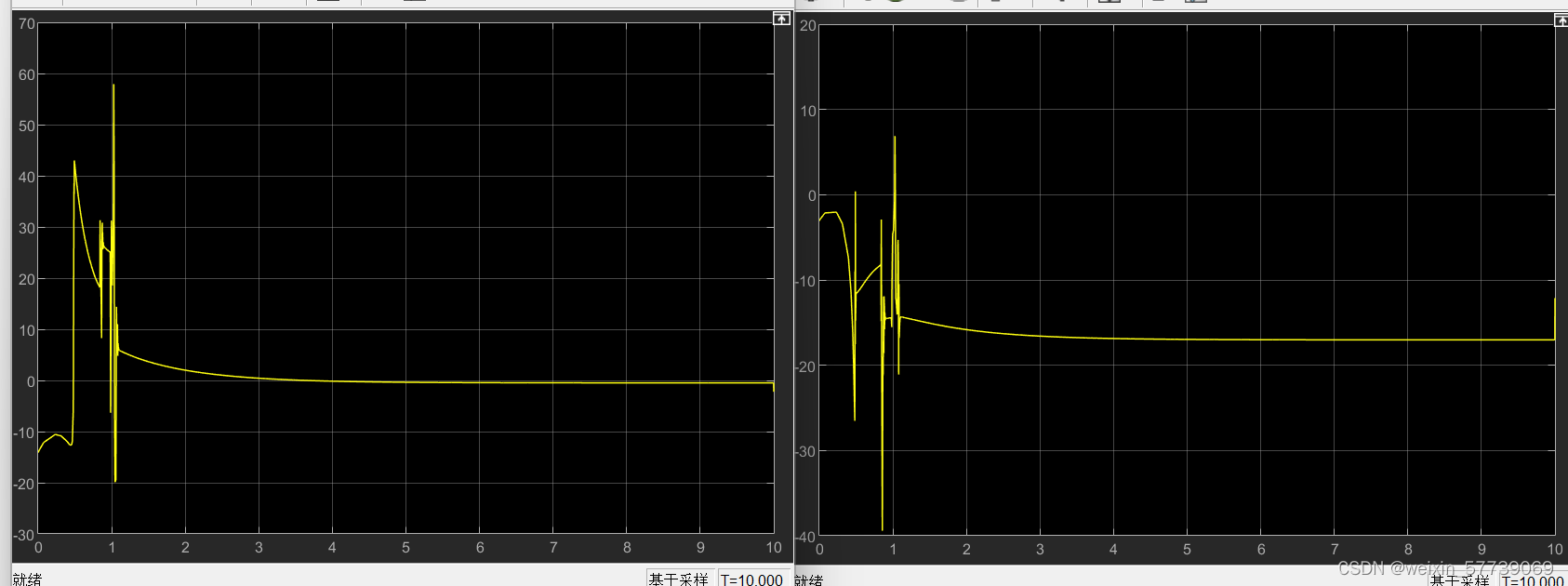
【机械手控制】基于matlab 4-RPR平面机械手的可操作性、工作空间分析和路径跟踪【含Matlab源码 7422期】
✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信或扫描文章底部QQ二维码。 🍎个人主页:Matlab凤凰涅槃 🏆代码获取方式:扫描文章底部QQ二维码 ⛳️座右铭:行百里者,半于九十。 更多Matlab路径规划仿真内容点击👇 ①Matlab路径规划(凤凰涅槃版) ⛳️关注微信公众号Matlab王者助手或Matlab海神之光,更多资源等你来!!

搜维尔科技:数据手套+机械手遥操作,五指触感灵巧手解决方案!
本灵巧手模仿人手的自由度分配及相关运动学参数进行设计的灵巧手,整手的手指设计采用了模块化的思想。整机重量轻,单指指尖抓取力强,五指灵巧手作为人体机器人或者机械臂末端操作工具,在工业生产的特殊环境中,对复杂形状的物体进行自适应抓取,以及复杂任务的操作。该灵巧手,凭借指尖末端多阵列压力传感器,可高精度地执行多种抓取操作。 指尖触觉传感器设计上下面电极为“五横五纵”形式,从而将

ABB机械手3HAC024518-001电机振动过大维修方案
【ABB机械臂伺服电机维修方案】 1. 更换轴承 如果检查发现轴承磨损,我们需要更换新的轴承。请选择与原轴承型号相同的产品,以确保电机正常运行。 2. 重新平衡转子 如果ABB机械手3HAC024518-001电机转子不平衡,我们需要重新平衡转子。这可以通过在转子特定位置增加或去除材料来实现。请遵循相关安全操作规程,确保平衡操作正确。 3. 修复定子绕组 如果定子绕组短路,我们需要修复定子绕组。这
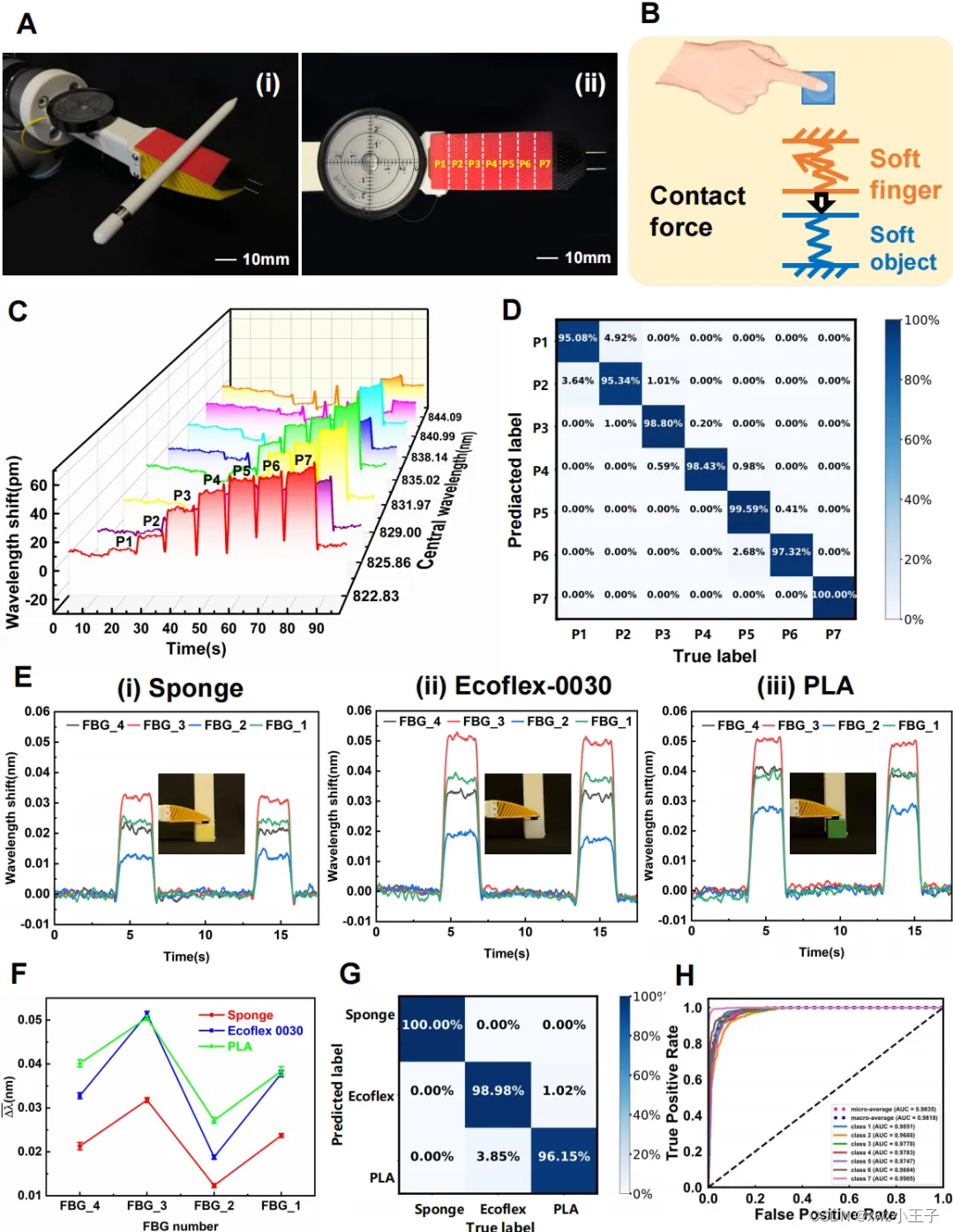
Advanced Intelligent Systems 清华大学曲钧天团队设计了基于光纤传感技术的多模态触觉感知仿生机械手
随着软体机器人技术的发展,触觉感知在人机安全交互、可穿戴设备和医疗器械领域发挥着重要作用。如何用简单的系统集成更多的触觉感知、获取更多交互信息面临着诸多挑战。 近日,清华大学国际研究生院曲钧天助理教授团队在国际期刊Advanced Intelligent Systems上发表以“A Bioinspired Robotic Finger for Multimodal Tactile Sensing

Panasonic机器人维修|松下机械手维修过程
在我们的科技日新月异的今天,松下机器人已经广泛应用于各个领域,发挥着越来越重要的作用。然而,这些Panasonic机械手维修过程也是一项重要且复杂的工作。 一、准备工作 在进行松下机器人维修前,需要充分了解机器人的构造和工作原理,以便于选择合适的维修方法。同时,还需要准备好必要的工具和设备,如维修手册、夹具、螺丝刀、焊接设备等。 二、故障诊断 在Panasonic机械臂维修过程中,故障诊断是至关重

EtherCAT运动控制器Delta机械手应用
ZMC406硬件介绍 ZMC406是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。 ZMC406支持6轴运动控制,最多可扩展至32轴,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随等功能。 ZMC406支持PLC、

ABB工业机械手IRB7600减速器维修识别故障
ABB机器人齿轮箱是机器人的核心部件之一,其维护和保养直接关系到机器人的使用寿命和工作效率。ABB工业机械手减速机主要由齿轮、轴承、油封等部件组成。减速器的主要功能是将电机的旋转运动转换为机器人的线性运动,从而实现机器人的各种动作。 常见的ABB机器人减速器故障 1. 齿轮磨损:长期使用可能导致齿轮磨损,从而影响机器人的运动精度和速度。 2. 油封泄漏:油封损坏可能导致润滑油泄漏,从而影响齿轮箱的

工业网关的数字化车间机械手和工业生产设备远程监控解决方案应用
工业生产环境中,数字化车间机械手和工业生产设备的远程监控日益成为一种趋势。随着工业互联网的快速发展和智能制造的兴起,传统的生产方式已经难以适应市场的需求和竞争的压力,因此,数字化车间机械手和工业生产设备的远程监控解决方案应运而生。 数字化车间机械手和工业生产设备远程监控解决方案:赋能智能制造的未来.随着科技的不断进步,数字化车间机械手和工业生产设备的远程监控解决方案在工业智能化的进程中具有重要
旋转中心 机械手抓料方式
一、为什么要计算旋转中心? 机器视觉——旋转中心的标定_旋转标定-CSDN博客 在机械手抓料的时候传送带上过来的料可能是各个角度的,不同的位置,这样如果我们没有做好机械手标定的话很难抓取,因此我们要做旋转中和和机械手TCP标定。 但是这里我要记录一下再项目中用的其他的一种方式,不需要标定,但是这个的精度可能就没有那么好了。但是做这个所有前提都是要做9点标定的。 那我命名第一方式就是 项目抓
人形机器人进展:IEEE Robotics出版双臂通用协同机械手操作架构
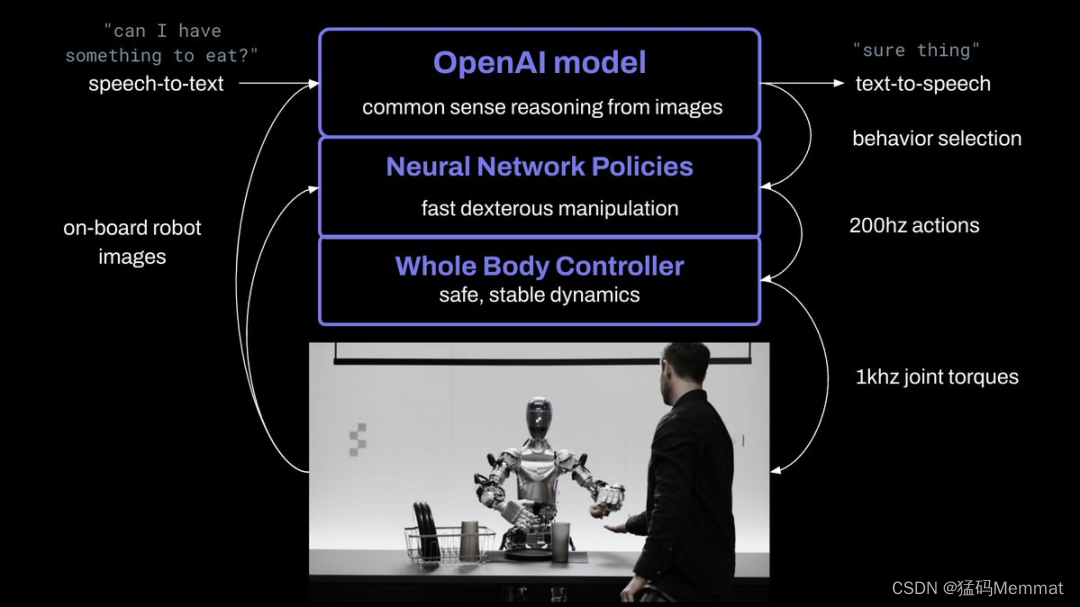
文章目录 1. Main2. My ThoughtsReference彩蛋a. OpenAI 投资: 人形机器人公司 Figure AIb. 人工智能软件工程师 Devin 上线 1. Main 图1 人居环境下的人形双臂机器人系统 通用人形机器人 作为近年来机器人与AI交叉领域的研究热点和技术竞争高地,因其具备在 非结构化人居环境 中承担各种琐碎家务的潜力而得到广
基于Arduino的可移动抓取机械手设计
目 录 摘 要 I Abstract II 引 言 1 1 系统总体设计方案 3 1.1 设计方案及流程 3 1.2 舵机的选择 5 1.3 遥控系统的选择 6 1.4 移动系统的选择 8 1.5 电源系统的选择 9 2 系统的硬件设计 11 2.1 整体的组成与安装 11 2.2 可移动的抓取机械手设计 15 2.3 Arduino开发平台 18 2.4 Arduino扩展板模块介绍 20 3
用于不确定机器人机械手的无颤振快速固定时间滑模控制
《Manipulators Chattering-free Fast Fixed-time Sliding Mode Control for Uncertain Robotic》 Huayang Sai , Zhenbang Xu, Enyang Zhang, Chunyang Han, and Yang Yu

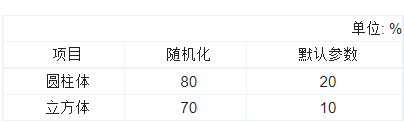
基于深度强化学习与多参数域随机化的水下机械手自适应抓取研究
源自:信息与控制 作者:王聪, 张子扬, 陈言壮, 张奇峰, 李硕, 王晓辉, 王森 引 言 水下机械手在海洋科考、海洋工程、搜救打捞等领域应用广泛,是目前水下有缆遥操作潜水器(remotely operated vehicle,ROV)与载人潜水器(human occupied vehicle,HOV)最主要的作业工具之一[1]。水下机械手目前主要分为两大类:液压机械手和电动机械手。其中,
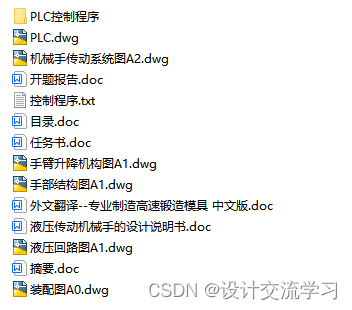
五自由度液压机械手及PLC控制系统设计(设计说明书+CAD图纸+开题报告+任务书+PLC控制程序+外文翻译……)
目 录 1 前言 1.1 工业机器人简介----------------------------------------------------------(1) 1.2 世界机器人的发展--------------------------------------------------------(1) 1.3 我国工业机器人的发展--------------------------
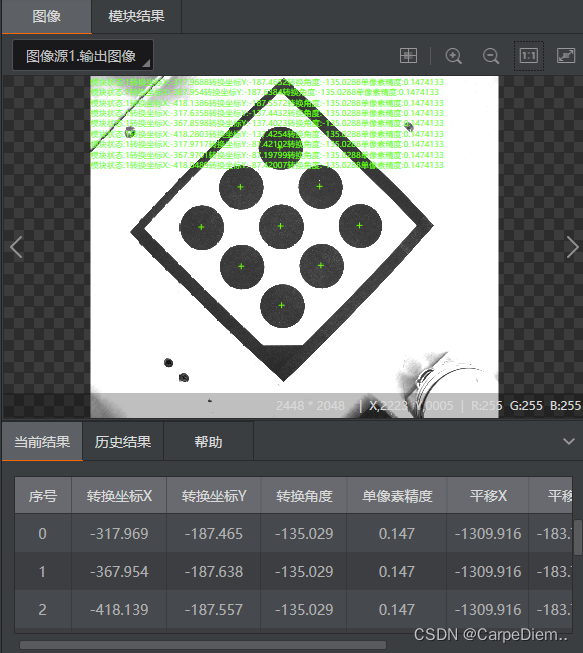
海康VisionMaster配合机械手九点标定
文章目录 一、图像源二、标定板标定三、N点标定四、标定转换总结 一、图像源 添加图像源,在图像源里添加标定板图片 二、标定板标定 拖入标定板标定 右键点击标定板标定,在运行参数里修改–物理尺寸(圆板两个相邻圆心的圆心距,单位是mm),标定板类型我们选择圆标定板,完事执行一下,这样我们九个点的圆心点就出来了 三、N点标定 拖入N点标定,用的标定板是九个点,所以平移

坐标机械手配件有哪些?
直线模组是一种常见的机械传动装置,广泛应用于机械手等自动化设备中,在机械手中的主要作用是实现机械手的运动控制和定位。 直线模组具有高精度、高可靠性的特点,可以满足坐标机械手对运动精度和稳定性的要求,在坐标机械手的关节处安装直线模组,可以将旋转运动转化为直线运动,从而实现机械手的精确定位和移动。除此之外,还有哪些坐标机械手配件呢? 1、执行器:主要功能是控制坐标机械手的运动,进行抓取、卸

ProEasy机械手案例:电池边包胶
如下图所示,对一个电池三边包边,因客户现场有很多规格电池的大小,所以就需要建立动态的工具坐标来实现适配所有种类的电池 程序如下:Ddome程序 function Speed(num) --速度设置 MaxSpdL(2000) --movl最大速度 MaxAccL(20000) --movl最大加速度
基于PLC的采摘机械手系统(论文+源码)
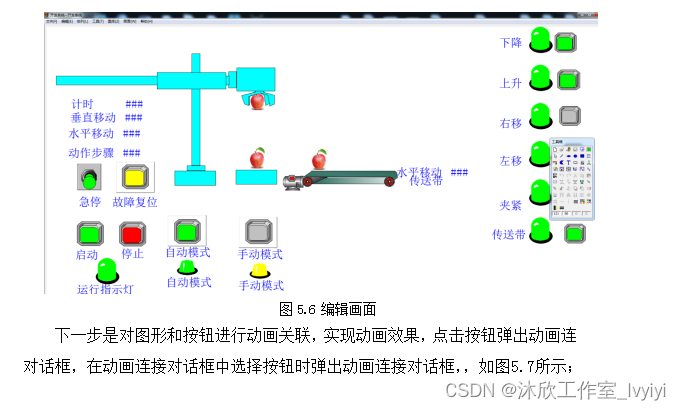
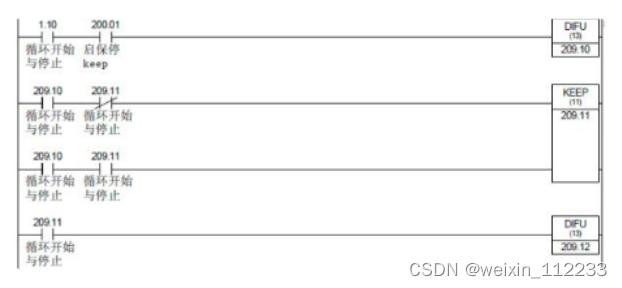
1.系统设计 本次设计围绕基于PLC的采摘机械手系统进行设计, PLC即可编程控制器其是一种常见的微处理器,本次拟采用西门子是S7-200 PLC,一方面对整个设计从器件选型到I/O分配,图纸绘制等进行设计,另一方面还通过组态王仿真软件进行仿真验证。通过仿真测试,本次设计的采摘采摘机械手在步进电机驱动下可以完成对采摘机械手在搬运过程中的下降、夹紧、上升、右旋、下降等全过程自动化控制,对后来学者具

机械手视觉引导相关算法
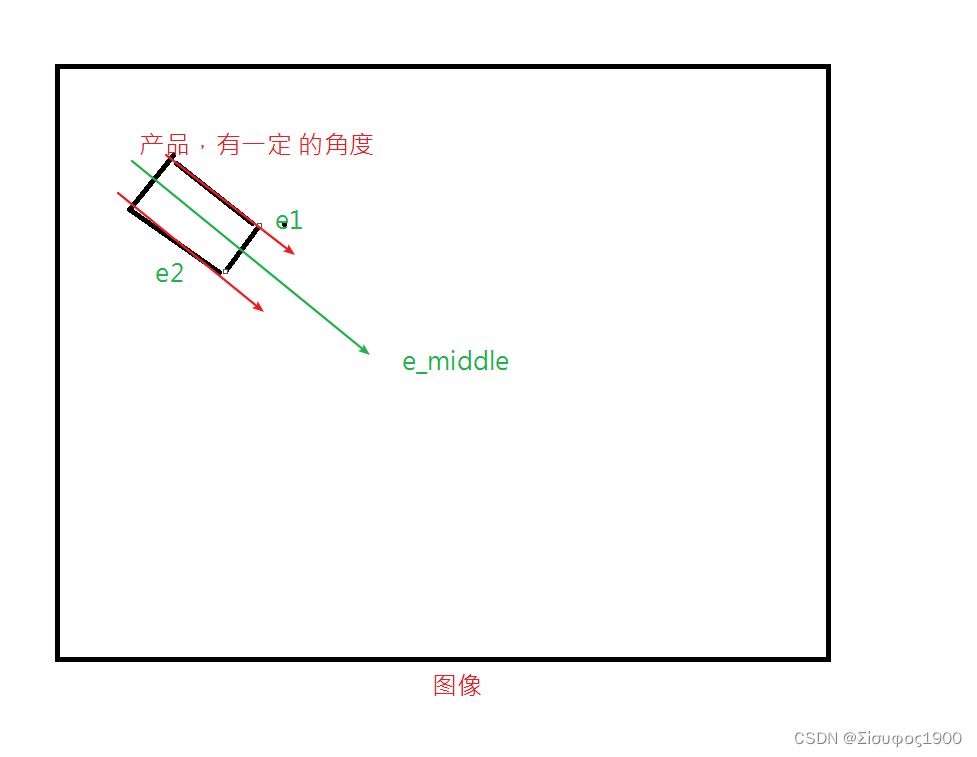
点击上方“小白学视觉”,选择加"星标"或“置顶” 重磅干货,第一时间送达 在开发项目的过程中,产品有一个入料初定位,需要操作员把产品放到载具上后,一个大视野的相机会拍一下产品,然后伺服电机对载具进行一个调整,以保证产品在小视野的相机范围内,从而进行检测。这里我们用到了相机和伺服电机的手眼标定,及位置补正算法。机械手分为:4轴,6轴或者XY模组或UVW模组。相关的视觉引导项目主要包括:抓取,放置

德国制造Kasite浮动去毛刺主轴——为您解决机械手各种工件精密加工去毛刺技术难题
德国制造Kasite浮动去毛刺主轴尖端技术方案 德国制造Kasite浮动去毛刺主轴——为您解决机械手各种工件精密加工去毛刺技术难题采用径向和轴向柔性浮动系统 + 高速电主轴4036DC-T 柔性系统的优点: -适用于机械手加工各种工件 -灵活性 -利用气压无级调节接触压力 -各个方向保持接触压力保证各个位置加工后表面光滑 -使用于各种机器人或者固定加工单元 高速电主轴优点: -速度高达 60 0
基于PLC控制的机械手设计
机电一体化专业设计交流 文章目录 前言一、摘要二、绪论1.1研究背景及意义1.2研究现状1.2.1国内研究现状1.2.2国外研究现状 二、相关概述2.1机械手2.2机械手工作原理2.3机械手的整体结构2.4PLC技术简介 三、机械手PLC控制系统设计3.1机械手各部件的设计3.1.1机械手手爪结构设计3.1.2机械手手腕结构设计3.1.3机械手手臂结构设计3.2机械手控制程序设计3.

LABVIEW TCP通讯之ABB机械手控制
前言: 最近在学习LABVIEW TCP通讯时,由于身边没有合适的设备,只能自己建立一个服务器一个客户端进行测试。电脑刚好安装了ABB机械手的RobotStudio,所以测试了TCP socket控制ABB机械手的程序。 如下 LABVIEW做服务器,ABB做客户端。 LABVIEW界面如下: 实现效果如下: ABB机械手二次开发之LABVIEW SOCKET通讯控制

多模态系统下软体机械手对多种意图的精准实时控制
脑机接口(BCI)技术在运动康复中表现出广泛的潜力,主要依靠神经可塑性来恢复运动功能并改善中风患者术后的生活质量。不过一般单纯依靠EEG信号输入的BCI系统通常很难自然地实时传达多任务软体机器人所需的各种控制命令。而多模态人机界面系统(mHMI),集合眼电信号(EOG)、脑电图(EEG)和肌电图(EMG)的特征来生成多维控制指令,有助于构建更友好、人性化的BCI辅助系统,帮助残疾人及运动障碍患

点云从入门到精通技术详解100篇-基于 3D 视觉信息的机械手抓取机械零部件(续)
目录 3.2 一对点云的快速全局配准 3.2.1 构建目标函数 3.2.2 构建对应关系 3.2.3 联合目标函数优化