本文主要是介绍旋转中心 机械手抓料方式,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、为什么要计算旋转中心?
机器视觉——旋转中心的标定_旋转标定-CSDN博客
在机械手抓料的时候传送带上过来的料可能是各个角度的,不同的位置,这样如果我们没有做好机械手标定的话很难抓取,因此我们要做旋转中和和机械手TCP标定。
但是这里我要记录一下再项目中用的其他的一种方式,不需要标定,但是这个的精度可能就没有那么好了。但是做这个所有前提都是要做9点标定的。
那我命名第一方式就是 项目抓取法。
二、项目抓取法
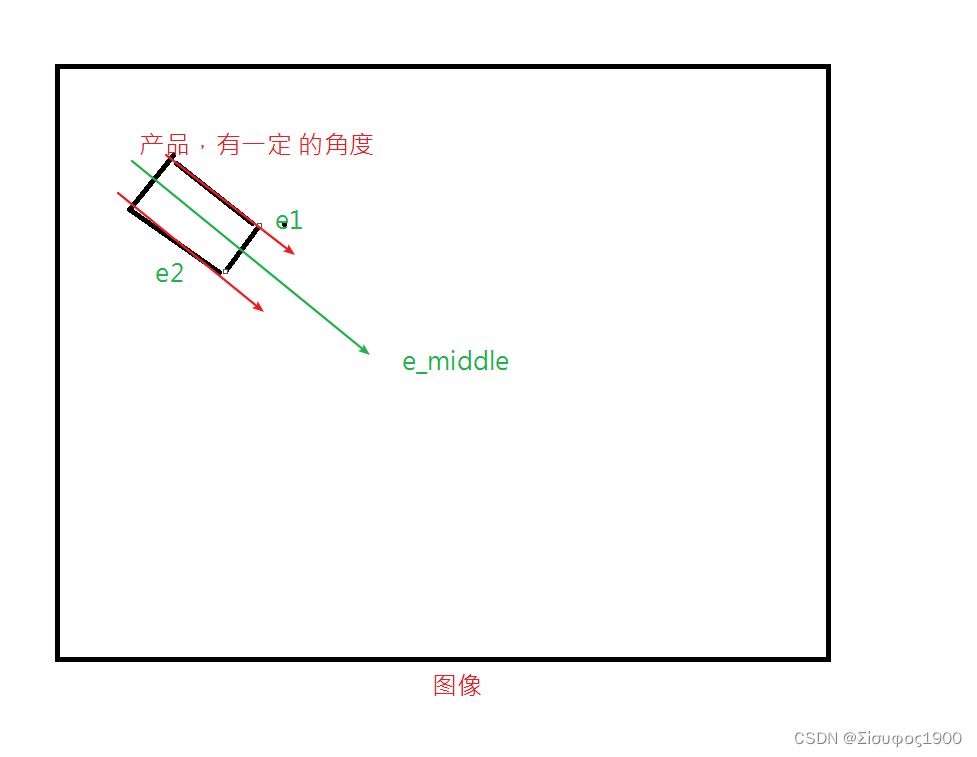
有一个前提就是相机不动,而且能排到传送带上的很大的视野,就是让每次产品的图片都在图像里面。示意图如下(盗图,懒得画)

计算偏移量
首先就是要做九点标定,做完之后我的思路是做一个 位移补偿

我们可以先计算出相机的的位置,然后用机械手做运动,让其走到我们想要的那个产品中间,如果有微小的差距,那么我们可以通过计算移动机械手,计算出差值 delt_x 和 delt_y ,这个值应该是很小的,其实就是一个补偿,我们也可以多做几次然后做一个均值,还可以做个标记然后做运动,其原理是一样的。
计算角度
我们的产品上面是一个矩性的东西,所以很容易找到一条边 如下
这篇关于旋转中心 机械手抓料方式的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







