底盘专题


利氪科技拿下C轮超级融资,国产智能底盘黑马奔向黄金时代
“智能驾驶遗珠,国产替代富矿。” 这是海通证券在最近一期研报中,描述线控底盘产业的用语。它很巧妙地点明了,这个藏在车身之下的部分,拥有何种特征——稳坐技术体系的核心点位,拥有前景广阔的市场。 事实上,大多数人都知道一个好的底盘有多重要,操控感、乘坐体验这些因素,一直都被绑定在底盘调教的概念上。但很少有人会特别关心底盘是怎么发展演变的,因为相比智驾这类话题,底盘更像一个没什么趣味的工科名词,更不

【通过新能源汽车的智慧数字底盘技术看计算机的相关技术堆栈?以后是软硬结合的全能程序员的天下,取代全栈(前后端都会的全栈程序员)】
汽车的“智慧数字底盘”是一个综合性的技术平台,旨在提升车辆的性能、安全性和驾驶体验。它集成了多种先进的技术和系统,是全能程序员的必杀技! 1. 传感器技术 a. 激光雷达(LiDAR) 用于生成高分辨率的3D地图,帮助车辆识别周围环境,进行实时障碍物检测和路径规划。 b. 摄像头 包括前视、后视和环视摄像头,用于车道保持、交通标志识别、行人检测和自动泊车等。 c. 雷达 提供高速物

使用树莓派和 L298N 来 DIY 小车底盘
树莓派小车可以作为 STEM(科学、技术、工程、数学)教育的工具,在实际操作中帮助学生理解和学习电子技术、编程和机器人原理。可以培养学生的动手能力、解决问题的能力和创新思维。 随着近年 AI 技术的高速发展,SLAM、VSLAM 甚至带 AI 功能的智能小车也成了学生们热衷的 “玩具”,价格不菲的成品智能小车,却也阻挡了不少学生的求知热情和脚步。 DIY 一个自己的丐版小车底盘,一来可以省米,
【自动驾驶】针对低速无人车的线控底盘技术
目录 术语定义 一般要求 操纵装置 防护等级 识别代号 技术要求 通过性要求 直线行驶稳定性 环境适应性要求 功能安全要求 信息安全要求 故障处理要求 通信接口 在线升级(OTA) 线控驱

干货满满!汽车线控底盘技术的前景、学习路径及资料!
线控底盘的概念随着新能源汽车的发展呼之欲出,其前景究竟几何?如何入门及成为线控底盘领域的专业人士… 关注我,共同交流,一起成长 前言一、汽车线控底盘研发岗的前景二、汽车线控底盘技术学习路径1.了解线控底盘技术2.入门线控底盘技术 前言 最近有粉丝问我汽车线控底盘方面的前景几何的问题,然后还有问怎么去开展线控底盘技术方面的学习,有没有啥资料,在这里统一和大家分享一下。

第 8 章 机器人底盘Arduino端入口(自学二刷笔记)
重要参考: 课程链接:https://www.bilibili.com/video/BV1Ci4y1L7ZZ 讲义链接:Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程 8.4.2 底盘实现_01Arduino端入口 ros_arduino_bridge/ros_arduino_firmware/src/libraries/ROSAr

gazebo抓取/轮式底盘仿真问题汇总
记录gazebo仿真中各种疑问 1、启动gazebo仿真环境后机器人不下落 <launch><arg name="world_name" default="worlds/empty.world"/><include file="$(find gazebo_ros)/launch/empty_world.launch" ><arg name="paused" value="true" /><ar
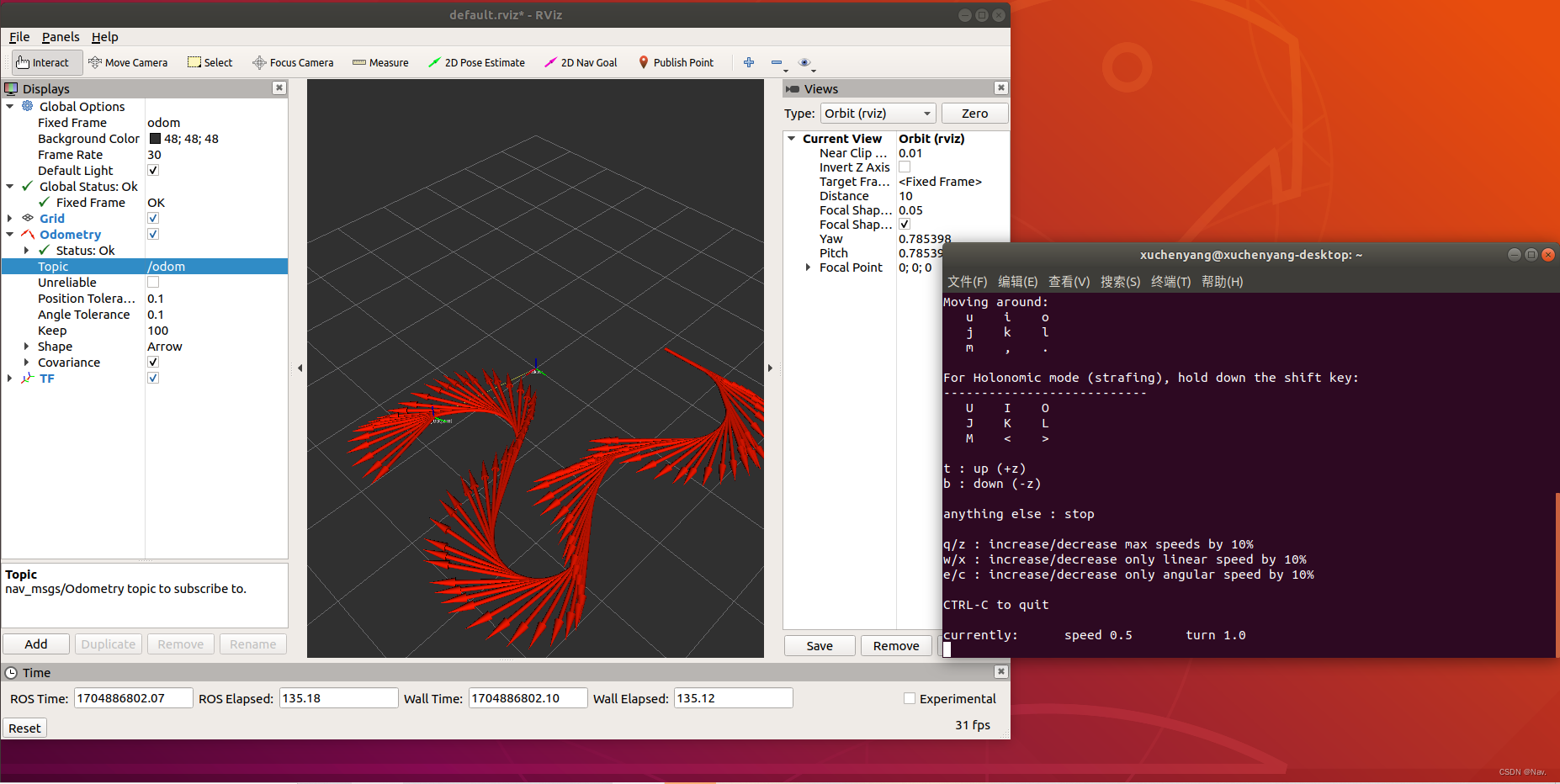
使用ros_arduino_bridge控制机器人底盘
使用ros_arduino_bridge控制机器人底盘 搭建了ROS分布式环境后,将ros_arduino_bridge功能包上传至Jetson nano,就可以在PC端通过键盘控制小车的运动了。实现流程如下: 系统准备;下载程序;程序修改;分别启动PC与Jetson nano端相关节点,并实现运动控制。 1 系统准备 ros_arduino_bridge是依赖于python-se
kinco底盘急停开关注意事项
机器人一直使用kinco的底盘,从软件工具kincoServco上可以看到急停的详细状态 连接上底盘后,代开I/O端口,里面第一个DIN1就是急停的选项。 这个位置如果是绿色指明正处于急停状 极性:当极性改变时,急停开关的按下与弹起会反过来。 状态保存:正常急停如下,按下后的状态 需要在基本操作里面,将存储IO配置参数添加到基本操作中,然后设置成1回车保存。
使用ros_arduino_bridge控制机器人底盘
使用ros_arduino_bridge控制机器人底盘 搭建了ROS分布式环境后,将ros_arduino_bridge功能包上传至Jetson nano,就可以在PC端通过键盘控制小车的运动了。实现流程如下: 系统准备;下载程序;程序修改;分别启动PC与树莓派端相关节点,并实现运动控制。 1 系统准备 ros_arduino_bridge是依赖于python-serial功能包的
Nvidia Jetson AGX Orin使用CAN与底盘通信(ROS C++ 驱动)
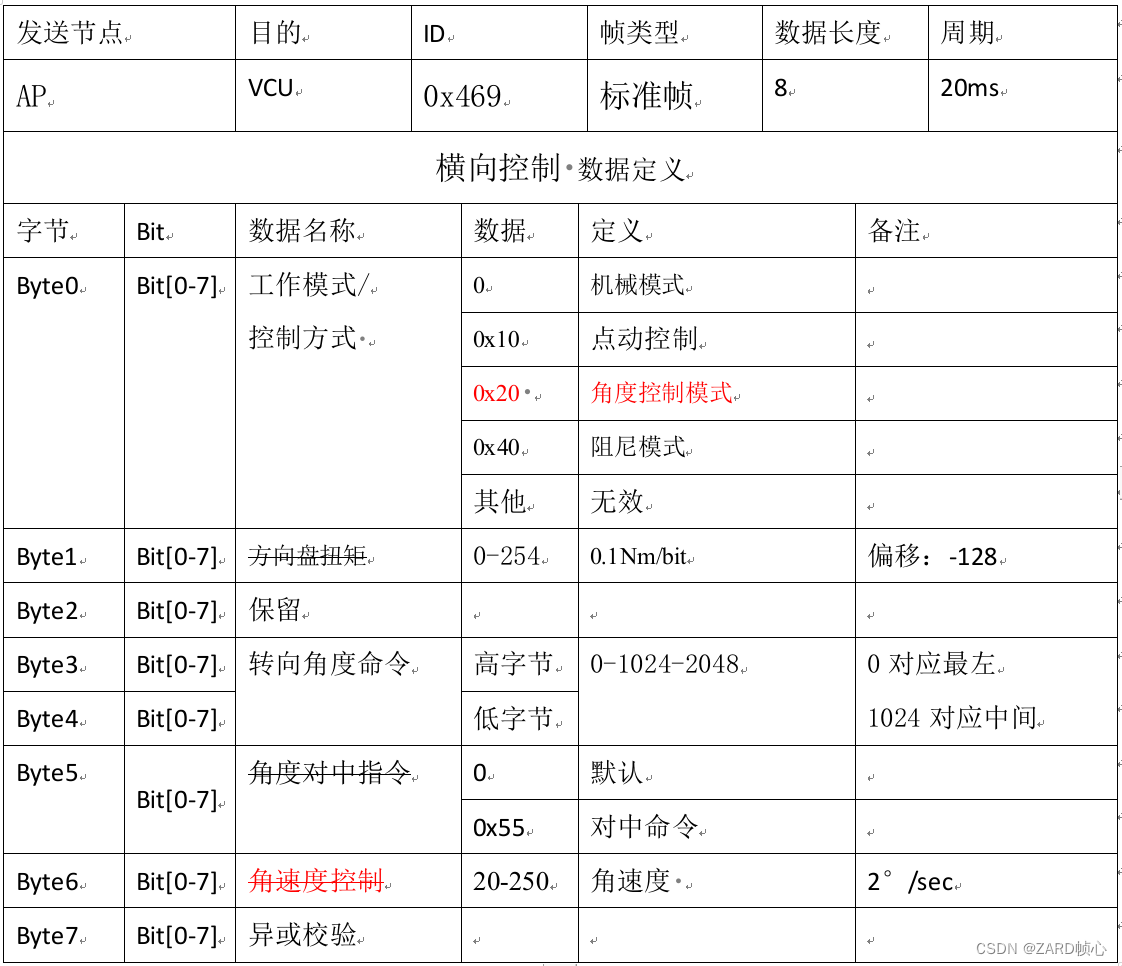
文章目录 一、Nvidia Jetson AGX Orin使用CAN通信1.1 CAN使能配置修改GPIO口功能1.2 can收发测试 二、通过CAN协议编写CAN的SocketCan ROS1驱动程序2.1 通讯协议2.2 接收数据节点2.3 发送数据节点2.4 功能包配置 三、ROS2驱动程序 一、Nvidia Jetson AGX Orin使用CAN通信 参考:http

热钱涌向线控底盘!XYZ全栈集成引领新风向
在车身、底盘部分,中央计算+区域控制带动传统车控、底盘及动力控制ECU市场迎来新一轮技术升级和域融合窗口期。线控制动、转向及空气悬架,正在加速与智能驾驶融合并进一步提升驾乘体验。 12月13-15日,2023(第七届)高工智能汽车年会暨高工金球奖评选颁奖典礼在上海隆重举行。在15号上午由【同驭汽车科技冠名】的专场六中,高工智能汽车研究院重磅发布了数据报告《中国智能汽车市场智能底盘数据报告(首发)
从来没见过这么“骚”的自主移动机器人底盘
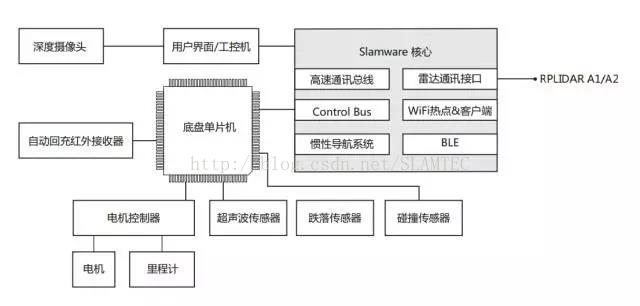
随着服务机器人应用场景和服务模式的不断扩展,基于机器人底层应用进行上层开发的服务机器人底盘需求越来越强。机器人底盘的出现,在节省了开发时间、成本的同时,也能加快产品研发速度,抢占服务机器人高速增长的市场风口。 SLAMTEC新一代机器人开发平台—Apollo,除了具备超高的颜值外,还拥有超强稳定的工作性能。外观小巧精致、性能稳定、性价比高,简单易用。 Apollo小巧精致,可用于任

全速冲刺!智能线控底盘「总动员」
作为智能化体验升级的关键一环,线控底盘赛道(从制动、悬架到转向)正在进入全面上车周期。同时,配合底盘域及中央控制架构,实现智驾与底盘的全面融合。 本周,丰田(以及旗下雷克萨斯品牌)宣布,即将于明年上市的纯电动SUV新车将成为这家全球汽车巨头首批在欧洲采用“线控转向”技术的车型。 ,时长00:09 同时,特斯拉的纯电动皮卡Cybertruck也将首次采用线控转向技术,并于上周开始交
选车最应看重的关键部件(三): 底盘
转载自董涛新浪博客http://blog.sina.com.cn/s/blog_41636c450100g4ni.html 早就想就底盘问题写点东西。前阵子博客上有人问我:汽车底盘到底是什么?不就是一个铁架子吗?各车不都差不多的铁架子吗?看来确实还有人没搞懂底盘到底是什么,更不用谈能够区别各车底盘的差异和优劣。 底盘当然不只是一个铁架子,尽管看起来是。只有当一个铁架子上装满传动系

ROS2+STM32智能小车底盘转向代码(C++版/HAL库版)
这个代码还没有测试通过,哈哈原理是不会错的你看吧 extern TIM_HandleTypeDef htim2;extern TIM_HandleTypeDef htim3;void adjustSpeed(TIM_HandleTypeDef htimx,/*引脚号*/unsigned int TIM_CHANNEL_X,/*速度*/int speed,int rotation){//获取分

5G时代想要进入机器人领域,云迹机器人底盘来帮你!
马上就要进入5G时代了,我们的生活将会发生非常大的变化。3G是读图时代,4G是视频时代,5G呢?没有人知道,但是有一点可以肯定,5G时代的酒店机器人会更加好用。如果你想进入机器人领域,抢占5G时代的制高点,可以让云迹机器人底盘来帮你。 云迹机器人底盘是一个包含完整成熟的感知、认知和定位导航能力的轮式机器人平台产品,是成熟的智能移动平台,功能齐全并且能够模块化开发,方便你的二次开发。 云迹机器人底

重大突破!国内首个ASIL D认证MCU在底盘域量产上车
中国本土车规级MCU再次实现了重要突破。 近日,芯驰科技的高性能车规MCU——E3搭载在明然科技悬架控制器(CDC)批量下线,并且成功在奇瑞瑞虎9、星途瑶光等车型上正式量产,成为了国内首个应用在主动悬架的车规控制芯片。 过去,由于车规级MCU的进入门槛极高、标准严苛等,中国本土车规级MCU大多只应用在雨刷、空调控制等低端控制功能上面,而动力系统、底盘系统、智能驾驶等中高端控制领域则是本

PIX 完成数千万Pre-A轮融资, 通用底盘才是想象的开始
This is not a game now, nobody can save you Spent up all your change and now your turn is done We won’t be afraid 'cause we’re the ones who made you Knock you out the frame, we won’t stop until you’re

23款奔驰GLC260L升级原厂 360全景影像 新款透明底盘
360全景影像影像系统提升行车时的便利,不管是新手或是老司机都将是一个不错的配置,无论是在倒车,挪车以及拐弯转角的时候都能及时关注车辆所处的环境状况,避免盲区事故发生,提升行车出入安全性。Xjh15863 360°全景影像包含:360模块,前部摄像头,左右带摄像头孔位的后视镜底壳,左右后视镜摄像头,线束等 通过中控大屏可以观察前后左右不同的车辆周边环境,极大地开拓了视野,防止车辆擦碰和人员安全
汽车行驶性能的主观评价方法(1)-底盘校准方法
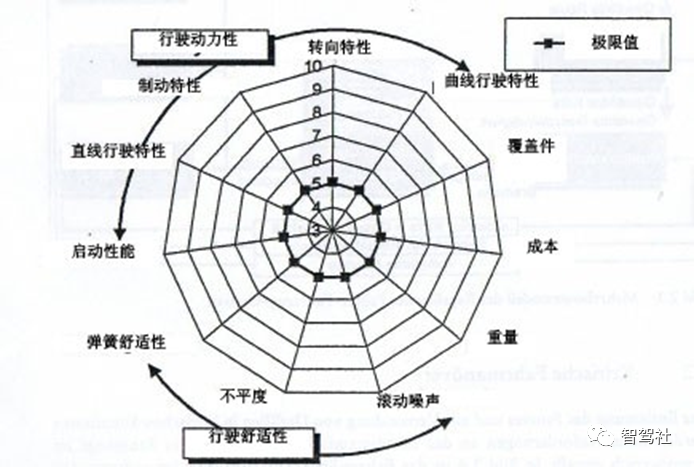
底盘校准的目的是,从行驶性能和行驶舒适性两个方面进行协调,从而优化行驶动力学特性。为了达到这一目标,工程人员早在设计阶段,就对大多数对行驶动力性有重要意义的部件提出了要求。这些要求不仅与底盘的组件有关,还必须考虑到车身、内饰、传动装置和控制系统所起的决定性影响(图 1.1)。在涉及所有零件的底盘调校过程中,这些研发要求被细化,并且转化为一个重复进行的过程。对此,有三种不同的方法可供采用: ■ 通
重大突破!国内首个ASIL D认证MCU在底盘域量产上车
中国本土车规级MCU再次实现了重要突破。 近日,芯驰科技的高性能车规MCU——E3搭载在明然科技悬架控制器(CDC)批量下线,并且成功在奇瑞瑞虎9、星途瑶光等车型上正式量产,成为了国内首个应用在主动悬架的车规控制芯片。 过去,由于车规级MCU的进入门槛极高、标准严苛等,中国本土车规级MCU大多只应用在雨刷、空调控制等低端控制功能上面,而动力系统、底盘系统、智能驾驶等中高端控制领域则是本
23款奔驰GLC260L升级原厂 360全景影像 新款透明底盘
360全景影像影像系统提升行车时的便利,不管是新手或是老司机都将是一个不错的配置,无论是在倒车,挪车以及拐弯转角的时候都能及时关注车辆所处的环境状况,避免盲区事故发生,提升行车出入安全性。Xjh15863 360°全景影像包含:360模块,前部摄像头,左右带摄像头孔位的后视镜底壳,左右后视镜摄像头,线束等 通过中控大屏可以观察前后左右不同的车辆周边环境,极大地开拓了视野,防止车辆擦碰和人员安全