本文主要是介绍从来没见过这么“骚”的自主移动机器人底盘,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
随着服务机器人应用场景和服务模式的不断扩展,基于机器人底层应用进行上层开发的服务机器人底盘需求越来越强。机器人底盘的出现,在节省了开发时间、成本的同时,也能加快产品研发速度,抢占服务机器人高速增长的市场风口。

SLAMTEC新一代机器人开发平台—Apollo,除了具备超高的颜值外,还拥有超强稳定的工作性能。外观小巧精致、性能稳定、性价比高,简单易用。

内置高性能激光雷达,时刻扫描周围环境

SLAMWARE算法提供精准导航规划
Apollo内置SLAMWARE自主定位导航系统,为机器人自主定位导航提供强有效的导航算法,精准严谨的导航规划。
完整成熟的自主定位导航解决方案,性价比高

负载15小时连续不间断工作
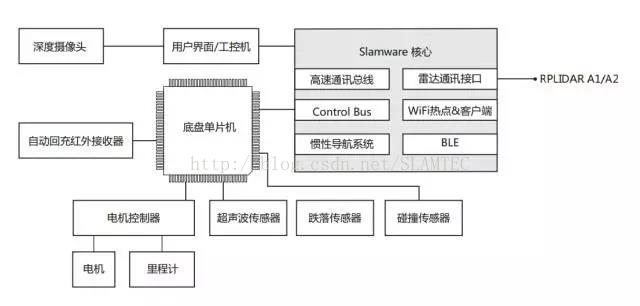
完全开放的用户接口,包括以太网、控制接口,电源等扩展接口;
支持Windows/Linux/Android/IOS开发环境互换,90%的接口定义均相同,方便用户快速切换;
丰富灵活的API接口,方便的几何函数计算,简单易用;
辅助软件包帮助协议及传感器诊断调试;
这篇关于从来没见过这么“骚”的自主移动机器人底盘的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!