移动机器人专题

多目标应用:基于自组织分群的多目标粒子群优化算法(SS-MOPSO)的移动机器人路径规划研究(提供MATLAB代码)
一、机器人路径规划介绍 移动机器人(Mobile robot,MR)的路径规划是 移动机器人研究的重要分支之,是对其进行控制的基础。根据环境信息的已知程度不同,路径规划分为基于环境信息已知的全局路径规划和基于环境信息未知或局部已知的局部路径规划。随着科技的快速发展以及机器人的大量应用,人们对机器人的要求也越来越高,尤其表现在对机器人的智能化方面的要求,而机器人自主路径规划是实现机器人智能化的

多目标应用:基于双存档模型的多模态多目标进化算法(MMOHEA)的移动机器人路径规划研究(提供MATLAB代码)
一、机器人路径规划介绍 移动机器人(Mobile robot,MR)的路径规划是 移动机器人研究的重要分支之,是对其进行控制的基础。根据环境信息的已知程度不同,路径规划分为基于环境信息已知的全局路径规划和基于环境信息未知或局部已知的局部路径规划。随着科技的快速发展以及机器人的大量应用,人们对机器人的要求也越来越高,尤其表现在对机器人的智能化方面的要求,而机器人自主路径规划是实现机器人智能化的
【路径规划】移动机器人在未知环境下目标的路径规划算法
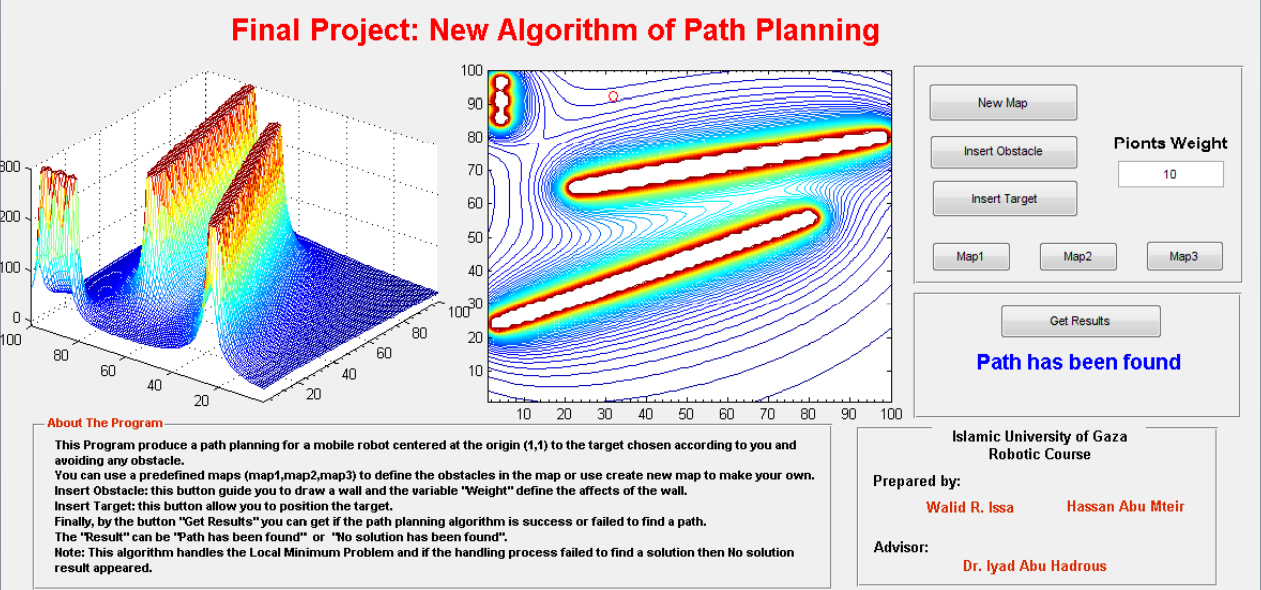
摘要 本文介绍了一种新型路径规划算法,专用于在包含多个障碍物的环境中为机器人找到最优路径。该算法通过分析障碍物位置和目标点位置,生成一个引导机器人避开障碍物并到达目标的路径。项目展示了路径规划在机器人导航中的重要性,并通过实验验证了算法的有效性。 理论 路径规划是机器人导航的核心技术,旨在寻找从起点到目标点的最优路径,避开环境中的障碍物。本文提出的算法通过以下步骤实现路径规划: 1.

多目标应用:基于多目标雾凇算法(MORIME)的移动机器人路径规划研究(提供MATLAB代码)
一、机器人路径规划介绍 移动机器人(Mobile robot,MR)的路径规划是 移动机器人研究的重要分支之,是对其进行控制的基础。根据环境信息的已知程度不同,路径规划分为基于环境信息已知的全局路径规划和基于环境信息未知或局部已知的局部路径规划。随着科技的快速发展以及机器人的大量应用,人们对机器人的要求也越来越高,尤其表现在对机器人的智能化方面的要求,而机器人自主路径规划是实现机器人智能化的重

多目标应用:基于NSGA3的移动机器人路径规划研究(提供MATLAB代码)
一、机器人路径规划介绍 移动机器人(Mobile robot,MR)的路径规划是 移动机器人研究的重要分支之,是对其进行控制的基础。根据环境信息的已知程度不同,路径规划分为基于环境信息已知的全局路径规划和基于环境信息未知或局部已知的局部路径规划。随着科技的快速发展以及机器人的大量应用,人们对机器人的要求也越来越高,尤其表现在对机器人的智能化方面的要求,而机器人自主路径规划是实现机器人智能化的重

全国大学生数学建模大赛模拟测试选拔题——移动机器人路径规划
移动机器人路径规划是机器人学的一个重要研究领域。 它要求机器人依据某个或某些优化原则(如最小能量消耗、最 短行走路线、最短行走时间等),在其工作空间中找到一条从 起始状态到目标状态能避开障碍物的最优路径。 机器人路径规划问题可以建模为一个有约束的优化问 题,都要完成路径规划、定位和避障等任务。 如上图所示正方形地板边长为1*1,整体为20*20块 地板的地面上,深蓝色为障碍物无法通行,浅

嵌入式智能移动机器人导航系统:状态空间控制算法、路径规划算法、PID控制算法(代码示例)
一、项目概述 随着科技的发展,智能机器人在各个领域的应用越来越广泛。本文介绍一个智能移动机器人导航系统的设计与实现,旨在通过状态空间控制与约束满足算法,确保机器人在动态环境中安全、平稳地导航。该系统的主要目标是解决机器人在复杂环境中自主移动的问题,提高其导航的安全性和效率。通过本项目,用户可以了解到如何设计一个具有自主导航能力的智能机器人,并应用于服务机器人和无人机等场景。 #mermai

slam移动机器人预测n秒后的里程数据
slam移动机器人预测n秒后的里程数据 为了实现这个功能,需要完成以下几个步骤: 订阅/odom话题并获取当前和上一时刻的里程计数据。计算两次里程计数据之间的位置和角度的偏移量。计算时间间隔dt。使用运动模型计算当前的速度vx, vy, vth。预测3秒后的位置和角度。将预测的位置和角度转换为geometry_msgs::TransformStamped类型。 #inc
移动机器人程序节点崩溃的处理
对于一些特殊情况例如程序节点崩溃,可能需要一些特殊的处理方法。处理目的是为了保证程序出现特殊异常情况导致崩溃也能在每人干预的情况下正常运行并完成某些初始化状态。常见处理工程化方法如下。 针对节点崩溃问题,可以设置守护进程或脚本来监控程序运行状态,如果发生崩溃可以用脚本将程序拉起保证在线状态同时保存堆栈日志。 对于定义建图节点崩溃重启后需要找回崩溃前丢

自主移动机器人两级规划架构
两级规划架构 目前大多数的自主移动机器人的导航系统都由两级规划系统组成,即基于全局环境信息的全局路径规划和基于传感器信息的局部路径规划。全局路径规划的任务是根据已知的全局信息将全局目标分解成局部目标交给局部路径规划。局部路径规划根据传感器获得的局部环境信息给出一条安全、无碰的局部路径,并且与传感器、多传感器融合模块、控制模块等组成连续的闭环使机器人到达局部目标。这种两级规划系统的优点是既弥补了
【论文复现|智能算法改进】基于改进鲸鱼优化算法的移动机器人多目标点路径规划
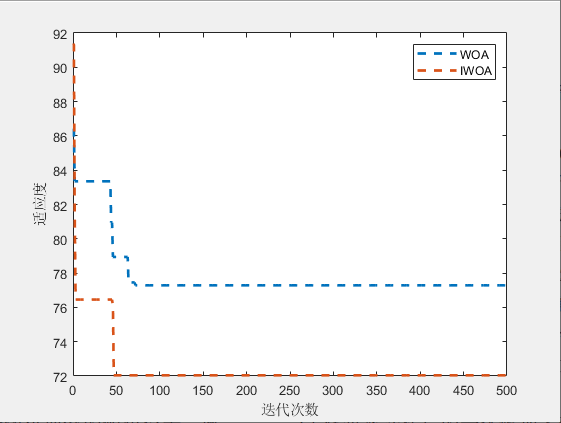
目录 1.算法原理2.数学模型3.改进点4.结果展示5.参考文献6.代码获取 1.算法原理 SCI二区|鲸鱼优化算法(WOA)原理及实现【附完整Matlab代码】 2.数学模型 使用 A* 算法生成所有目标点之间的距离矩阵U: U = [ d 1 − 1 d 1 − 2 d 1 − 3 ⋯ d 1 − i d 2 − 1 d 2 − 2 d 2 − 3 ⋯ d 2 −

基于移动机器人多传感器的信息融合
多传感器信息融合的意义:可有效的解决单传感器的模糊点更精确的观察和解释环境。 多传感器信息融合的方法(算法): 经典推理法、加权平均法、卡尔曼滤波、贝叶斯估计、D-S证据理论、统计决策理论、聚类分析、参数模板、熵法、品质因数法、估计理论法、专家系统法、产生式规则、人工神经网络、模糊推理、粗糙集理论、小波分析、支持向量机 多传感器信息融合的体系结构:集中式、分布式、混合式 多传感器信息融合的层
3.4 移动机器人工作空间(摘自自主移动机器人导论2)
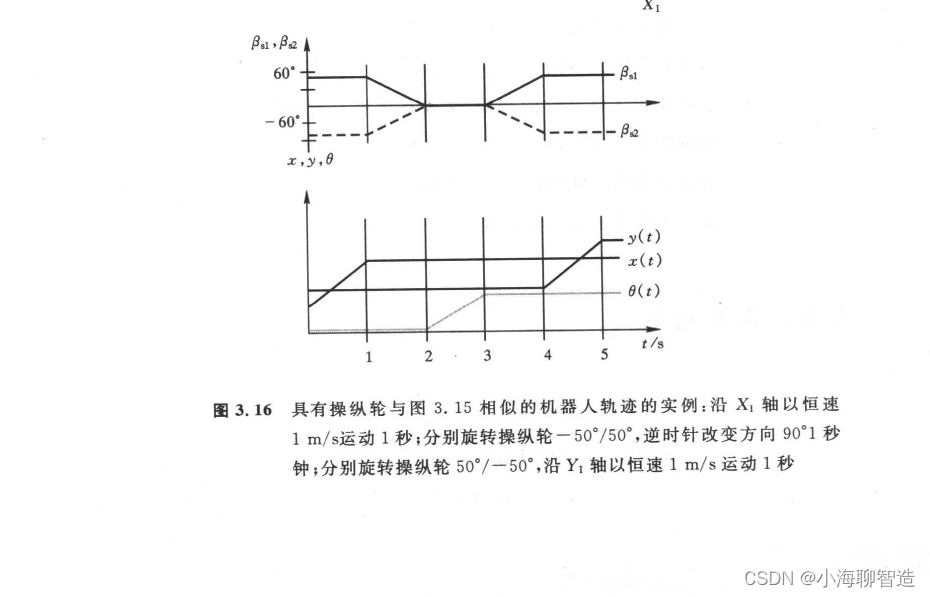
对于一个机器人来说,机动性等效于它的控制自由度。但是,机器人是处于某种环境的,因而下一个问题是把我们的分析放到环境之中。 我们关心机器人用它可控制的自由度在环境中定位它本身的方法。例如,考虑 Ackerman 车辆或汽车,对这种车辆而言,控制的自由度总数是 δm = 2。一个为操纵;另一个为驱动轮的执行。但在它的环境中,车辆的自由度是什么呢?事实上,它是 3 个。汽车可以在平面上将它自己定位于任
用户场景对移动机器人功能的影响
场景会促进机器人的改进与迭代,也是因为场景的不同才发展出了不同功能的机器人,例如割草机和擦窗机器人,同时通过在不同应用场景的测试可以全面测试机器人的各项功能,也是因为在某些场景中跑出问题所以才有了功能迭代,下面介绍几种常见机器人的场景相关的优化问题和技术点。 首先介绍一下泳池清洁机器人,其用户场景就是常见的各种泳池,通常是别墅自带的小型泳池,面积通常在十几平方米,有

移动机器人系统与技术:自动驾驶、移动机器人、旋翼无人机
这本书全面介绍了机器人车辆的技术。它介绍了道路上自动驾驶汽车所需的概念。此外,读者可以在六足机器人的构造、编程和控制方面获得宝贵的知识。 这本书还介绍了几种不同类型旋翼无人机的控制器和空气动力学。它包括各种旋翼推进飞行器在不同空气动力学环境下的模拟和飞行。 这本书适合学术界、教育工作者、学生和对自动驾驶汽车、机器人和旋翼无人机感兴趣的研究人员。 书籍推荐- 《移动机器人系统与技术》这
16册 | 移动机器人(自动驾驶)系列
此文档整理推荐了16本移动机器人(自动驾驶)相关的书籍,内容包括:ROS、机器人基础开发、分布式机器人控制、集群机器人控制、嵌入式机器人、多传感器融合等等。 学习,切勿急于求成,读书自学,需多注意编程实操练习! 《ROS小白入门:机器人简易编程》 书籍:Robot Operating System (ROS) for Absolute Beginners: Robotics Progra
无人驾驶(移动机器人)路径规划之RRT与RRTStar算法及其matlab实现
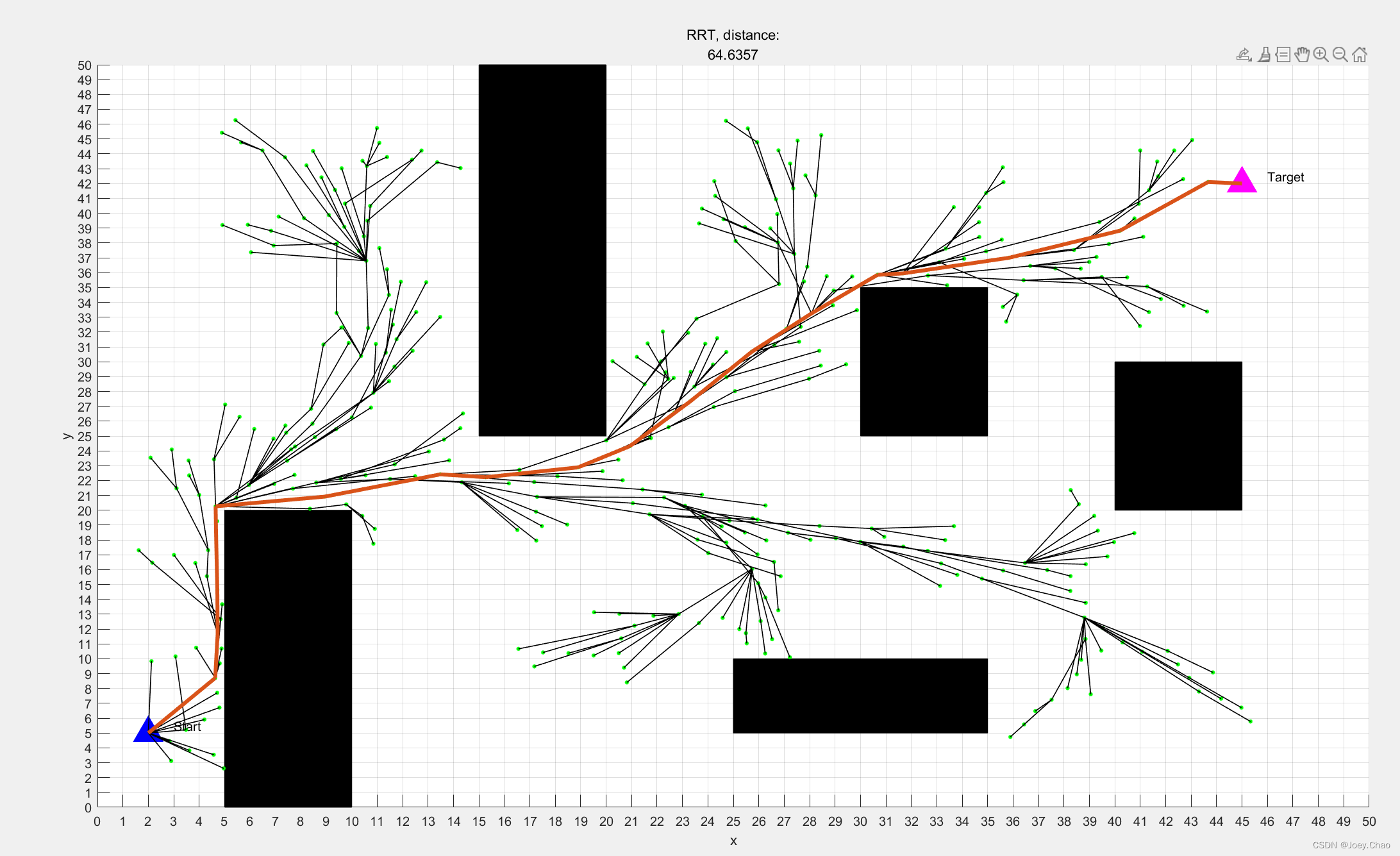
在自动驾驶与移动机器人路径规划时,必定会用到经典的算法RRT与RRT Star。下面是RRT与RRTStar的matlab实现效果。可以发现RRTStar效果明显改善。 目录 一、效果比较 1.1 RRT算法效果(黑色为障碍物,红色线为最终路径,蓝色三角形为开始点,粉色三角形为目标点) 1.2 RRTStar算法效果(黑色为障碍物,红色线为最终路径,蓝色三角形为开始点,粉色三

工业机器人——AGV移动机器人
AGV即:Automated Guided Vehicle 简称AGV,当前最常见的应用如:AGV搬运机器人或AGV小车,主要功用集中在自动物流搬转运,AGV搬运机器人是通过特殊地标导航自动将物品运输至指定地点,最常见的引导方式为磁条引导,激光引导,磁钉导航、惯性导航。 一、应用范围 1、仓储业 2、制造业 3、邮局、图书馆、港口码头和机场 4、烟草、医药、食品、化工 5、危险场所和特

机器人路径规划:基于Q-learning算法的移动机器人路径规划,可以自定义地图,修改起始点,提供MATLAB代码
一、Q-learning算法 Q-learning算法是强化学习算法中的一种,该算法主要包含:Agent、状态、动作、环境、回报和惩罚。Q-learning算法通过机器人与环境不断地交换信息,来实现自我学习。Q-learning算法中的Q表是机器人与环境交互后的结果,因此在Q-learning算法中更新Q表就是机器人与环境的交互过程。机器人在当前状态s(t)下,选择动作a,通过环境的作用,形成新

移动机器人运动规划---基于图搜索的基础知识
配置空间 机器人规划的配置空间概念:一个空间包含所有机器人自由度的机器人配置,描述为C-space 机器人配置:表示对机器人上面所以点的位置的描述机器人自由度:规划的时候用最少的坐标数量去表示机器人配置,例如无人机规划,在微分平坦中进行规划则是x\y\z\yaw四个变量,所以对于无人机轨迹规划来说有四个自由度。机器人配置空间:一个空间包含所有机器人自由度的机器人配置,描述为C-space 任
机器人路径规划:基于移动机器人路径规划的Q-learning算法,可以自定义地图,修改起始点,提供MATLAB代码
一、Q-learning算法 Q-learning算法是强化学习算法中的一种,该算法主要包含:Agent、状态、动作、环境、回报和惩罚。Q-learning算法通过机器人与环境不断地交换信息,来实现自我学习。Q-learning算法中的Q表是机器人与环境交互后的结果,因此在Q-learning算法中更新Q表就是机器人与环境的交互过程。机器人在当前状态s(t)下,选择动作a,通过环境的作用,形成新
无人驾驶(移动机器人)路径规划之A star(Tie Breaker)算法及其matlab实现
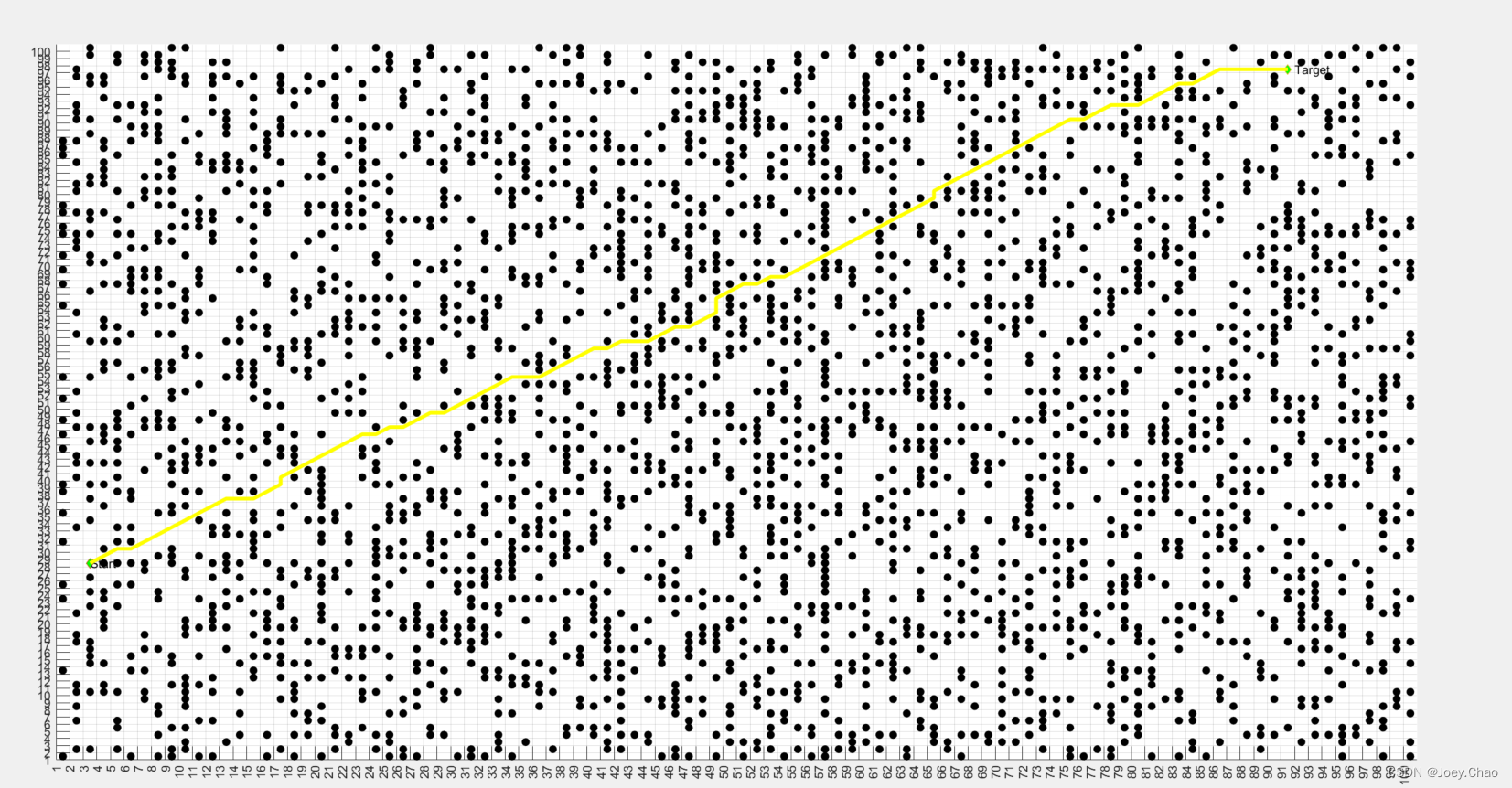
在自动驾驶与移动机器人路径规划时,必定会用到经典的算法A star。下面是我未加入与加入Tie Breaker 的matlab实现效果。可以发现加入Tie Breaker之后效果明显改善。 目录 一、效果比较 1.未加入Tie Breaker(黑色为障碍物,菱形绿色为目标点与起始点,红色为close,绿色为open,黄色为最终路径) 2.加入Tie Breaker(黑色为障碍物,
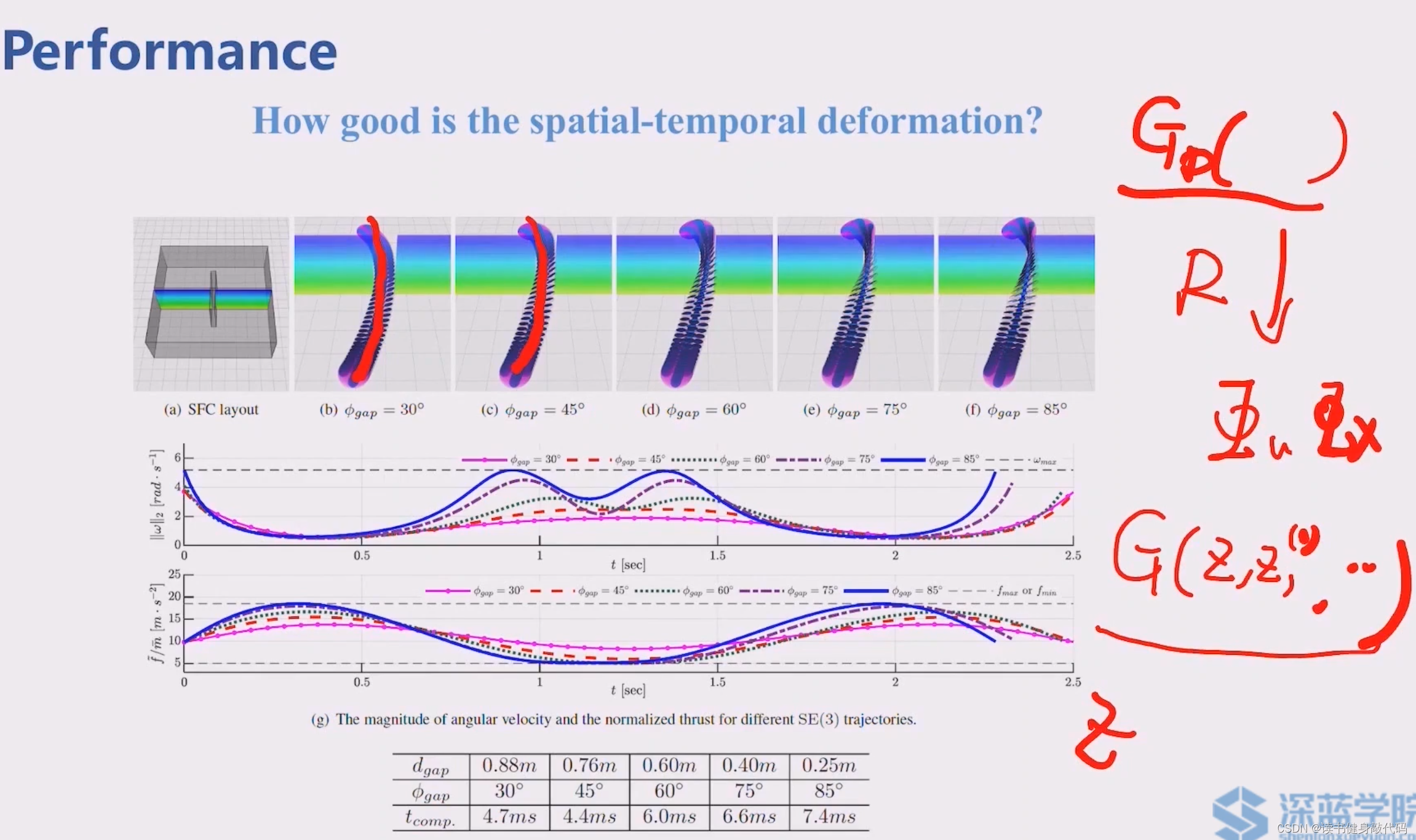
【深蓝学院】移动机器人运动规划--第5章 最优轨迹生成--笔记
文章目录 1. Preliminaries2. Multicopter dynamics and differential flatness(多旋翼动力学和微分平坦特性)2.1 Differential Flatness2.2 具体建模2.3 Flatness Transformation的解析推导 3. Trajectory Optimization轨迹优化3.1 Problem form
【深蓝学院】移动机器人运动规划--第3章 基于采样的路径规划--笔记
0. Preliminaries 做规划都是将WS转到C space下进行。 找到可行解和最优解(这两个不同) 通过增量或者批次地在C-space中采样来增量式地构建树或者图。 不显式地构造 如果把整个规划问题看成一个大的优化问题,那么大问题可以拆分成小问题进行求解。 整个规划问题可以分为两个基本的tasks:Explotration和Exploitation Explotratio
【深蓝学院】移动机器人运动规划--第3章 基于采样的路径规划--作业
0. Assignment T1. MATLAB实现RRT 1.1 GPT-4任务分析 RRT伪代码: 任务1即使用matlab实现RRT,结合作业所给框架,简单梳理,可结合1.2代码理解: 设置start,goal,near to goal threshold Thr,step的步长DeltaTree初始化,数据结构:2D xy坐标,父节点xy坐标,父节点到该节点距离,父节点