本文主要是介绍【论文复现|智能算法改进】基于改进鲸鱼优化算法的移动机器人多目标点路径规划,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 1.算法原理
- 2.数学模型
- 3.改进点
- 4.结果展示
- 5.参考文献
- 6.代码获取
1.算法原理
SCI二区|鲸鱼优化算法(WOA)原理及实现【附完整Matlab代码】
2.数学模型
使用 A* 算法生成所有目标点之间的距离矩阵U:
U = [ d 1 − 1 d 1 − 2 d 1 − 3 ⋯ d 1 − i d 2 − 1 d 2 − 2 d 2 − 3 ⋯ d 2 − i d 3 − 1 d 3 − 2 d 3 − 3 ⋯ d 3 − i ⋮ ⋮ ⋮ ⋱ ⋮ d j − 1 d j − 2 d j − 3 ⋯ d j − i ] U=\begin{bmatrix}d_{1-1}&d_{1-2}&d_{1-3}&\cdots&d_{1-i}\\d_{2-1}&d_{2-2}&d_{2-3}&\cdots&d_{2-i}\\d_{3-1}&d_{3-2}&d_{3-3}&\cdots&d_{3-i}\\\vdots&\vdots&\vdots&\ddots&\vdots\\d_{j-1}&d_{j-2}&d_{j-3}&\cdots&d_{j-i}\end{bmatrix} U= d1−1d2−1d3−1⋮dj−1d1−2d2−2d3−2⋮dj−2d1−3d2−3d3−3⋮dj−3⋯⋯⋯⋱⋯d1−id2−id3−i⋮dj−i
其中,di-j为第i个目标点到第j个目标点 A* 算法所规划路径的实际距离。
多目标点路径规划问题可表述为:移动机器人需要遍历n个目标点,且每个目标仅被遍历一次,目的是求一条经过所有目标点的最短路径。
V = ∑ i = 1 , i = 1 n x ( l i , l j ) V=\sum_{i=1, i=1}^nx\Big(l_i,l_j\Big) V=i=1,i=1∑nx(li,lj)
3.改进点
自适应搜索控制系数
在标准鲸鱼优化算法中,系数向量C为均匀分布在[0,2] 内的随机数,是一个控制搜索速率的参数,故C值是在每次迭代时随机生成的,这可能导致搜索行为较为随机,无法充分平衡算法全局搜索和局部搜索的能力,从而导致
收敛精度不足。本文提出一种自适应搜索控制系数动态调整:
C = 2 k ⋅ ( 1 − i / i max ) C=2k\cdot\begin{pmatrix}1-i / i_{\max}\end{pmatrix} C=2k⋅(1−i/imax)
记忆库列表策略
添加一个记忆库列表,使算法能够记录迭代过程中遇到过的当前最优解。
PS:个人感觉用处不大🤣
再加入一种自己提出的创新改进策略A
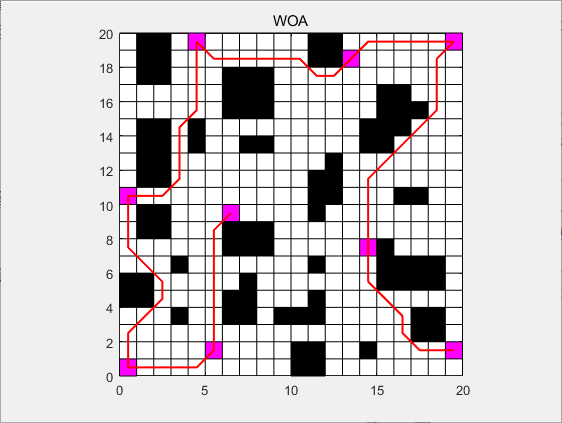
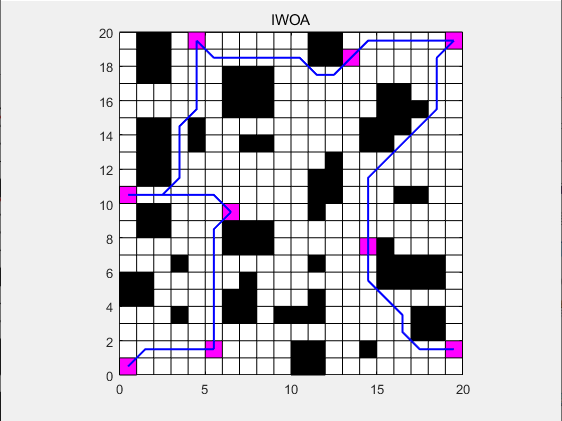
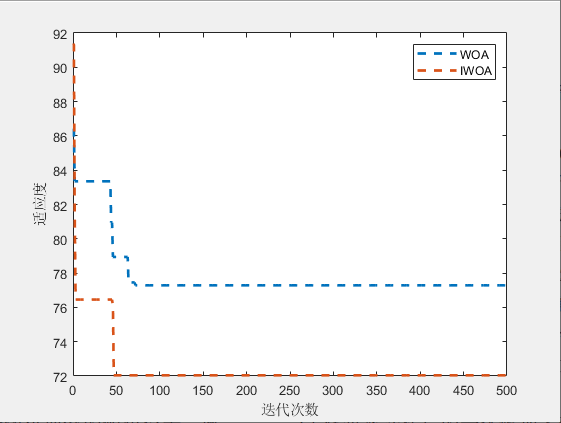
4.结果展示
5.参考文献
[1] 王步伟,潘鹏程.基于改进鲸鱼优化算法的移动机器人多目标点路径规划[J].机器人技术与应用,2023,(06):14-19.
6.代码获取
这篇关于【论文复现|智能算法改进】基于改进鲸鱼优化算法的移动机器人多目标点路径规划的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


