寻路专题

Python QT实现A-star寻路算法
目录 1、界面使用方法 2、注意事项 3、补充说明 用Qt5搭建一个图形化测试寻路算法的测试环境。 1、界面使用方法 设定起点: 鼠标左键双击,设定红色的起点。左键双击设定起点,用红色标记。 设定终点: 鼠标右键双击,设定蓝色的终点。右键双击设定终点,用蓝色标记。 设置障碍点: 鼠标左键或者右键按着不放,拖动可以设置黑色的障碍点。按住左键或右键并拖动,设置一系列黑色障碍点

斯坦福UE4 C++课学习补充25:寻路EQS
文章目录 一、创建EQS二、修改行为树三、查询上下文 一、创建EQS 场景查询系统EQS:可用于收集场景相关的数据。然后该系统可以使用生成器,通过各种用户定义的测试就这些数据提问,返回符合所提问题类型的最佳项目Item。 EQS的一些使用范例包括:找到最近的回复剂或弹药、判断出威胁最大的敌人,或者找到能看到玩家的视线 参考链接:https://dev.epicgames.c

A*算法解决迷宫寻路问题
A*算法解决迷宫寻路问题 问题描述 下图是一个迷宫,试为机器人找一条从Start到End的最短路径设计一搜索算法 设计思路 a)状态空间的表示 首先将迷宫图转换为列表形式呈现,每个格子用 (横坐标,纵坐标,上通路状态,下通路状态,左通路状态,右通路状态)来表示,通路状态用1或0表示,可通过为1,不可通过为0。比如起点(1,1),假定不能从起点出去,所以(1,1)可以走下或走右,所以第一格

【游戏跨场景寻路】基于egret(白鹭)的游戏地图跨场景寻路功能的实现
每次时间久了算法就会淡忘,温故耗时,故做下整理,方便日后取材。 参考网址: 原理性讲解:https://www.toutiao.com/a6540828594954830340/ 基于as3的代码:https://blog.csdn.net/sjt223857130/article/details/77199601 堆优化理解:https:

寻路算法 A* 广度优先 深度优先
一般的游戏中都会有寻路算法,在我学程序的这几年里,或多或少有意无意的接触到,虽然我目前的项目中并不需要设计相关的寻路算法,但作为致力于成为独立游戏开发者的我,总是要学习的~~因为,将来的某一天,肯定会用到。 以前就很好奇,一个网游RPG,那些任务引导是怎么让玩家去找到对应的NPC,还有在地图上点一个点,玩家就会自动找到不错的方式去到达目标点,其中如果遇到障碍是跳起来,还是费起来,还是绕过去

Unity中初步使用Navmesh寻路系统
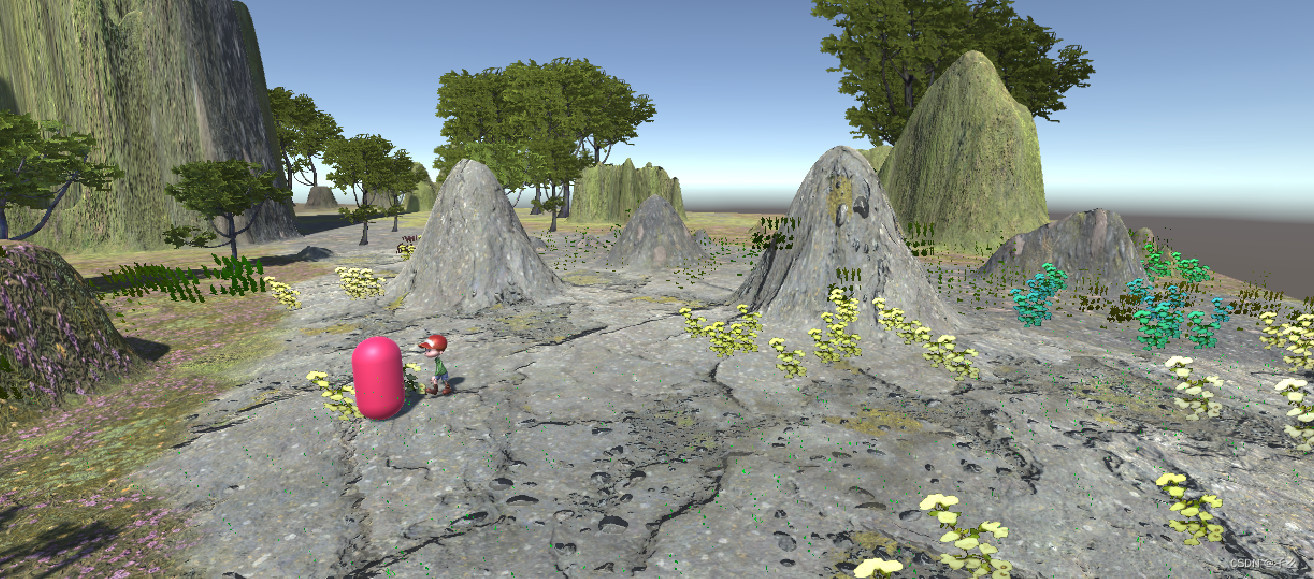
效果demo: 一、新建测试场景 测试场景:新建空Navmesh作为路径的容器 二、设置导航路径 在可以通过的物体上勾选Navigation Static,代表参与到导航的烘焙。 进行烘焙,点击bake按钮,场景出现蓝色的导航网格即代表成功。 三、设置某些不可走的地方 四、添加小人,挂上NavMeshAgent组件 五、利用这个组件控制小人的移动 usin

一篇写的比较简单的A*寻路算法(转)
http://www.raywenderlich.com/zh-hans/21503/a%E6%98%9F%E5%AF%BB%E8%B7%AF%E7%AE%97%E6%B3%95%E4%BB%8B%E7%BB%8D 这篇文章还可以在这里找到 英语 If you're new here, you may want to subscribe to my RSS feed or follow

人工智能: 自动寻路算法实现(三、A*算法)
前言 本篇文章是机器人自动寻路算法实现的第三章。我们要讨论的是一个在一个M×N的格子的房间中,有若干格子里有灰尘,有若干格子里有障碍物,而我们的扫地机器人则是要在不经过障碍物格子的前提下清理掉房间内的灰尘。具体的问题情景请查看人工智能: 自动寻路算法实现(一、广度优先搜索)这篇文章,即我们这个系列的第一篇文章。在前两篇文章里,我们介绍了通过广度优先搜索算法和深度优先算法来实现扫地机器人自动寻路的

人工智能: 自动寻路算法实现(二、深度优先搜索)
前言 本篇文章是机器人自动寻路算法实现的第二章。我们要讨论的是一个在一个M×N的格子的房间中,有若干格子里有灰尘,有若干格子里有障碍物,而我们的扫地机器人则是要在不经过障碍物格子的前提下清理掉房间内的灰尘。具体的问题情景请查看人工智能: 自动寻路算法实现(一、广度优先搜索)这篇文章,即我们这个系列的第一篇文章。在上一篇文章里,我们介绍了通过广度优先搜索算法来实现扫地机器人自动寻路的功能。在这篇文

人工智能: 自动寻路算法实现(一、广度优先搜索)
前言 随着人工智能技术的日益发达,我们的生活中也出现了越来越多的智能产品。我们今天要关注的是智能家居中的一员:扫地机器人。智能扫地机器人可以在主人不在家的情况下自动检测到地面上的灰尘,并且进行清扫。有些更为对路线进行规划,找到可以清理灰尘的最短路径,达到省电的效果。当然,绕过障碍物也是必须拥有的技能。我们今天就来看一下扫地机器人自动寻路的算法的简单实现。这里我们不对机器人如何识别出灰尘进行讨论,
一种非常简单有效的基于格子的寻路算法
这是之前手游项目中琢磨出来的一个简单易行, 同时感觉比较高效的一个寻路算法. 当然有一个前提, 是基于格子的寻路, 你的格子可以是正方形, 六边形等. 总之, 从一个格子移动到旁边任何一个格子的代价是相等的, 也就是步数都是一, 这个算法可能也适应于其它场景, 当然我对寻路算法也没什么研究, 仅仅是解决了我所遇到的问题. 这是一个最短路径寻路算法. 地图如下, 6 * 6, 当

游戏中的寻路算法研究
1)Unity NavMesh研究 思考:毫无疑问,unity中自带的navmesh寻路是比较健全的,无奈在服务器中无法使用,这样子我们没办法做怪的导航,但是可以先体验下都有哪些api,并且可以可视化的看效果。 2)优先队列的研究 1)用途:海量定时器:如活动3天后开,避免轮询。取出前面几个:寻路搜索算法: A*算法2)数据结构:二叉堆。 思考:这个不仅仅是定时器,也为下面的A*学习
【recast-navigation-js】使用three.js辅助绘制Agent寻路路径
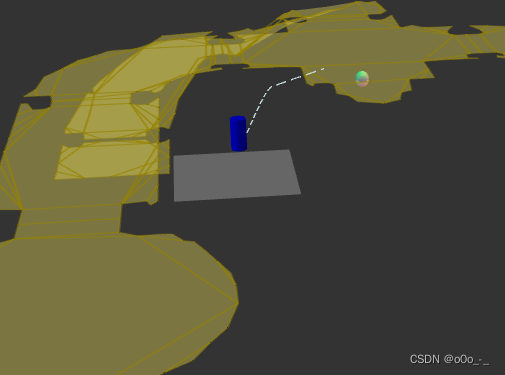
目录 说在前面setAgentTarget绘制寻路路径结果问题其他 说在前面 操作系统:windows 11浏览器:edge版本 124.0.2478.97recast-navigation-js版本:0.29.0golang版本:1.21.5上一篇:【recast-navigation-js】使用three.js辅助绘制Agent setAgentTarget 使用r
GDPU unity游戏开发 寻路与导航
学会寻路,出门在外,身份不是他给的,他做不了你一直的导航。 角色寻路 角色控制器替换为普通的角色控制器,给实验九的地形增加NavMesh Surface组件,然后给角色增加NavMesh Agent组件,并选择合适的参数。通过脚本来实现自动寻路。 结合实验十的动画角色,将角色控制器替换为动画角色,并通过脚步来实现自动寻路。采用寻路系统后,角色的移动是由寻路系统来完成的,也就是说寻路系统

蓝桥杯-专题-简单图论(大臣旅费网络寻路)
很久没写题了,最近就刷刷蓝桥杯,本来图论写的少,就接触过初级的最短路,现在就是练练手 1.大臣旅费 题目 很久以前,T王国空前繁荣。为了更好地管理国家,王国修建了大量的快速路,用于连接首都和王国内的各大城市。 为节省经费,T国的大臣们经过思考,制定了一套优秀的修建方案,使得任何一个大城市都能从首都直接或者通过其他大城市间接到达。同时,如果不重复经过大城市,从首都到达每个大城市的方案都是唯一的。
题目 1452: 网络寻路
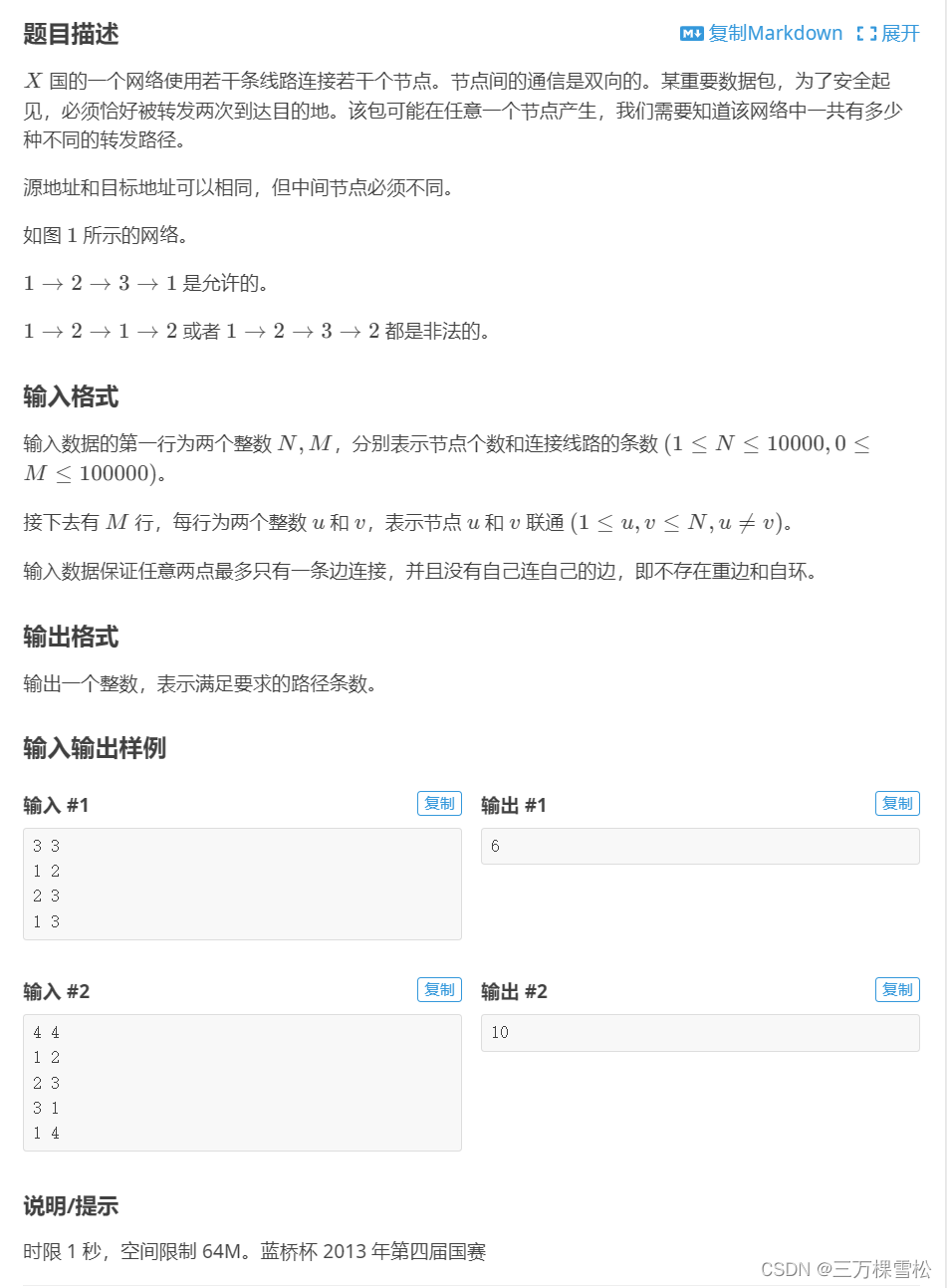
题目描述: X 国的一个网络使用若干条线路连接若干个节点。节点间的通信是双向的。某重要数据包,为了安全起见,必须恰好被转发两次到达目的地。该包可能在任意一个节点产生,我们需要知道该网络中一共有多少种不同的转发路径。 源地址和目标地址可以相同,但中间节点必须不同。 如下图所示的网络。 1 -> 2 -> 3 -> 1 是允许的 1 -> 2 -> 1 ->

Godot插值、贝塞尔曲线和Astar寻路
一、插值 线性插值是采用一次多项式上进行的插值计算,任意给定两个值A和B,那么在A和B之间的任意值可以定义为:P(t) = A * (1 - t) + B * t,0 <= t <= 1。 数学中用于线性拟合,游戏应用可以做出跟随效果(宠物跟随、npc跟随) const FOLLOW_SPEED = 4.0func _physics_process(delta):var mouse_pos =
【蓝桥杯-单链表-网络寻路】
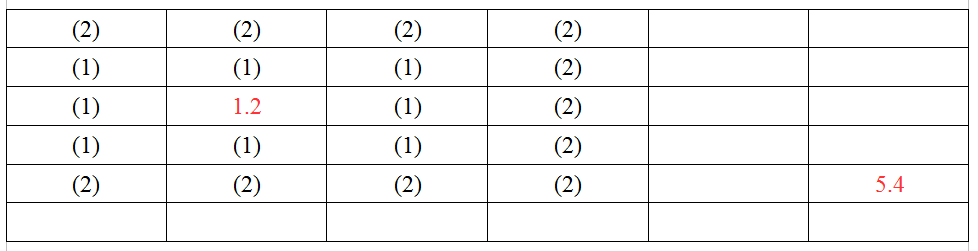
蓝桥杯-单链表-网络寻路 单链表基本操作操作一:向链表头插入一个数操作二:在第 k个插入的数后插入一个数操作三:删除第 k个插入的数后面的一个数; P8605 [蓝桥杯 2013 国 AC] 网络寻路 单链表基本操作 初始化有关操作 // head 表示头结点的下标// e[i] 表示节点i的值// ne[i] 表示节点i的next指针是多少// idx 存储当前已经用到
游戏地图寻路算法 -- A*(分析 + 实现 + 教学视频连接)
首先理解游戏地图怎么设定那里不让走那里让走: 把图片分成一块一块格子,标记各个格子是否能走; 介绍一下A* A*的核心就是 : 一个评估函数 F = G + H 和 2个表 假设 从A点到B点: F = G + H: - F: 从A到B的最短路径长度; - G: 从起点,沿着产生的路径, 移动到指定点的耗费; - H: 预估值,估计从A到B多长;(是一个比较理想的值)

Unity AI Navigation自动寻路
目录 前言一、Unity中AI Navigation是什么?二、使用步骤1.安装AI Navigation2.创建模型和材质3.编写向目标移动的脚本4.NavMeshLink桥接组件5.NavMeshObstacle组件6.NavMeshModifler组件 三、效果总结 前言 Unity是一款强大的游戏开发引擎,而人工智能(AI)导航是游戏中至关重要的一部分。通过Unity

【游戏测试】客户端性能 - 寻路采集热点图
原文由资深游戏测试开发工程师 陈子昂,发表于TesterHome社区,点击原文链接可与作者交流。 导读 写这个类型文章的原因是,很多时候会写代码的很多,但是如何少走弯路,做出一些有价值工具产出贡献一点绵薄之力。 在入职第二年也打算大力发展做这块(根据过往积累和经验写下了这个文章),但是后面平台化后,这件事会推研到 2022 年。 过去也是把这个工具开发方式小范围共享过,在对方公司也获得了