圆柱体专题

【机器人学】7-4.六自由度机器人自干涉检测-两圆柱体空间关系【附MATLAB代码】
目录 前言 公式推导 MATLAB代码 前言 前面介绍了两个圆柱的旋转变换,已将两个圆柱体旋转到了比较好分析的位置,下面将正式分析两个圆柱体的位置关系。会借用投影的思想。 一 根据机械臂的几何数据以及DH参数,确定机械臂等效的圆柱体的上下圆心坐标。 二 将一个圆柱体旋转到与坐标Z轴对齐,另一个圆柱体转到,上下圆在XoY

【Java】—— Java面向对象进阶:继承小练习-Java中实现圆柱体类及其体积计算
目录 1. 定义圆类(Circle) 2. 定义圆柱体类(Cylinder) 3. 测试圆柱体类 4. 总结 在Java中,我们可以通过面向对象的方式来模拟现实世界中的物体,比如圆柱体。本篇文章将通过一个简单的示例来展示如何定义一个圆柱体类(Cylinder),并计算其体积。此外,我们还将创建一个圆类(Circle)作为基类,因为圆柱体的底面本质上是一个圆。 根

【机器人学】7-3.六自由度机器人自干涉检测-圆柱体的旋转变换【附MATLAB代码】
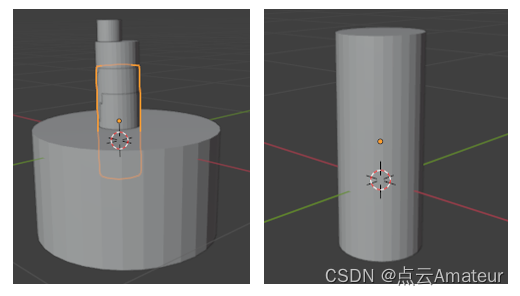
前言 上一章确定了机械臂等效的圆柱体的上下圆心坐标,这篇文章将解决算法三个核心中的第二个核心: 一 根据机械臂的几何数据以及DH参数,确定机械臂等效的圆柱体的上下圆心坐标。 二 将一个圆柱体旋转到与坐标Z轴对齐,另一个圆柱体转到,上下圆在XoY平面的

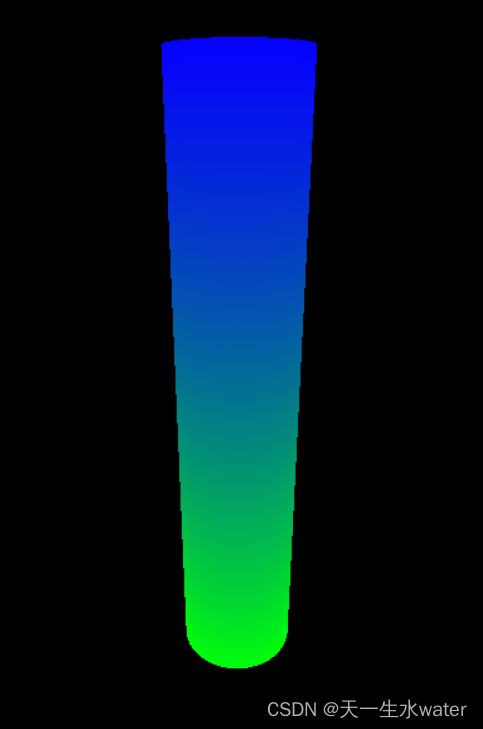
通过 MATLAB 的 cylinder 函数生成圆柱体的表面坐标,生成表示一个具有非标准形状的圆柱体(在本例中是杯子)
MATLAB的机器人系统工具箱(RST)的官方例程Plan a Reaching Trajectory with Multiple Kinematic Constraints规划具有多个运动学约束的到达轨迹 % 创建用于视觉化杯子的点[X,Y,Z] = cylinder(cupRadius*linspace(0,1,50).^0.125);% 调整 Z 坐标的比例,使其符合杯子的高度Z
【CGAL】圆柱体检测结果后处理
文章目录 文章说明算法思路代码展示结果展示 文章说明 这篇文章主要介绍,对使用CGAL中的 Region Growing 算法爬取圆柱体的结果进行后处理,以获取位置、轴向量、半径都较为合理的单个圆柱体。 在之前的一篇文章中,使用了open3D生成的标准圆柱体测试了爬取圆柱的代码,结果并不好。结果中标准圆柱体被分了好几部分,也就是说,算法检测到了多个圆柱体,但实际上只有一个。其原

UG编程中圆柱体的精确编程之道
UG编程中圆柱体的精确编程之道 在UG编程的世界中,圆柱体作为一种基础且重要的几何形态,其编程过程既需要精确的技巧,又蕴含着深厚的理论知识。本文将从四个方面、五个方面、六个方面和七个方面,深入探讨如何在UG编程中精确创建圆柱体,带领读者领略这一过程的奥秘与挑战。 四个方面:圆柱体的基本定义与属性 首先,我们需要明确圆柱体的基本定义和属性。圆柱体是一种由两个平行且相等的圆形底面以及连接这两个底

Three.js——二维平面、二维圆、自定义二维图形、立方体、球体、圆柱体、圆环、扭结、多面体、文字
个人简介 👀个人主页: 前端杂货铺 ⚡开源项目: rich-vue3 (基于 Vue3 + TS + Pinia + Element Plus + Spring全家桶 + MySQL) 🙋♂️学习方向: 主攻前端方向,正逐渐往全干发展 📃个人状态: 研发工程师,现效力于中国工业软件事业 🚀人生格言: 积跬步至千里,积小流成江海 🥇推荐学习:🍖开源 rich-vue3 🍍前端面试
1009 圆柱体表面积
#include<iostream>#include<iomanip>using namespace std;#define pi 3.14int main(){double r,h,s;cin>>r>>h;s=2*pi*r*h+2*pi*r*r;cout<<setiosflags(ios::fixed)<<setprecision(2)<<s<<endl;return 0;}

OJ第六批——Problem I: B 继承 圆到圆柱体
问题及代码: Problem I: B 继承 圆到圆柱体 Time Limit: 1 Sec Memory Limit: 128 MB Submit: 276 Solved: 209 [ Submit][ Status][ Web Board] Description 定义了Circle圆形类,在此基础上派生出Cylinder圆柱体类。 Circle圆形类定义如下
FreeCAD傻瓜教程之创建参数化几何图形-螺旋体、平面、球体、椭球体、圆柱体、圆锥体、棱柱、椭圆
目的:学会用FreeCAD绘制参数化的几何图形。 一、使用的工作台和工具 1.1选择Part 工作台 1.2单击创建图元...工具 也就是上图黄色工具区域的倒数第2个 1.3 打开几何图元 下方的下拉列表 二、绘制螺旋体、弹簧、螺丝杆 2.1 选择几何图元列表中的 “螺旋体” 设置 节距、高度、半径、坐标系等数值 2.2使用放样功能对弹簧线材进行填充 2.2.1
一个three.js渲染的圆柱体
一个three.js渲染的圆柱体 <!DOCTYPE html><html lang="en"><head><meta charset="UTF-8"><meta name="viewport" content="width=device-width, initial-scale=1.0"><title>Well Visualization</title><style>body { marg
【Vuforia+Unity】AR03-圆柱体物体识别(Cylinder Targets)
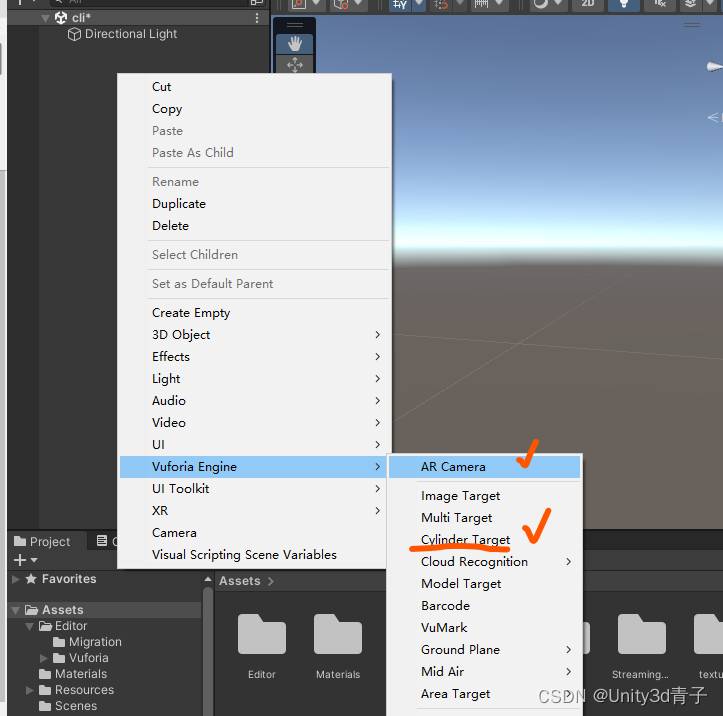
1.创建数据库模型 这个是让我们把生活中类似圆柱体和圆锥体的物体进行AR识别所选择的模型 Bottom Diameter:底部直径 Top Diameter:顶部直径 Side Length:圆柱侧面长度 请注意,您不必上传所有三个部分的图片,但您需要先为侧面曲面关联一个图像,然后才能下载设备数据库并使用这个圆柱体目标。 剩下的步骤和前面一样,下载数据库,放到Unity中
【Vuforia+Unity】AR03-圆柱体物体识别
1.创建数据库模型 这个是让我们把生活中类似圆柱体和圆锥体的物体进行AR识别所选择的模型 Bottom Diameter:底部直径 Top Diameter:顶部直径 Side Length:圆柱侧面长度 请注意,您不必上传所有三个部分的图片,但您需要先为侧面曲面关联一个图像,然后才能下载设备数据库并使用这个圆柱体目标。 剩下的步骤和前面一样,下载数据库,放到Unity中

PyBullet (四) 将圆柱体看作机器人,推动目标,让目标按照输入的路径在可移动障碍物中移动
将圆柱体看作机器人,推动目标,让目标按照输入的路径在可移动障碍物中移动 1. 整体思路1.1 分情况讨论1.1.1 锐角/直角 + 锐角1.1.1.1 计算垂足1.1.1.2 计算距离1.1.1.3 向“上”移动1.1.1.4 “推” 1.1.2 钝角 + 锐角1.1.2.1 计算垂足1.1.2.2 计算方向 1.1.3 锐角 + 直角1.1.3.1 “1.1.1.1”1.1.3.2 向“上
12. Threejs案例-绘制颜色渐变圆柱体
12. Threejs案例-绘制颜色渐变圆柱体 实现效果 知识点 CylinderGeometry (圆柱缓冲几何体) 一个用于生成圆柱几何体的类。 构造器 CylinderGeometry(radiusTop : Float, radiusBottom : Float, height : Float, radialSegments : Integer, heightSegment

第七周项目 2 简单计算问题体验(并联电阻,圆柱体表面积)
/**Copyright (c) 2014, 烟台大学计算机学院*All rights reserved.*文件名称 :main.cpp*作 者 :韩娟*完成日期 :2014年10月11日*版 本 号 :v1.0**问题描述 :输入两个电阻r1,r2的阻值,计算并输出他们并联后的阻值*输入描述 :两个浮点数,代表两个电阻阻值*程序输出 :一个浮点数,代表并联电阻的阻值*

多平面包络的圆柱体参数估计
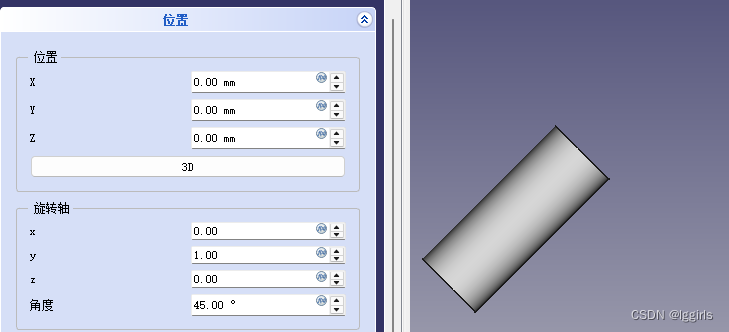
多平面包络的圆柱体参数估计 场景 现有多个空间平面包络一个柱体,从圆柱顶端俯视如图所示: 中心位置为圆柱实际所在位置。现在已知这些平面的参数(每个平面的方程均为ax+by+cz+d=0形式, 参数为a,b,c,d),希望求解它们包络的这个圆柱的几何信息。 分析 三维空间中,圆柱的几何信息有两类表达方式: 圆柱中轴的方向向量 ( u , v , 1 ) (u,v,1) (u,v,1)和中
zzuli oj 1011: 圆柱体表面积(java)
题目描述 输入圆柱体的底面半径r和高h,计算圆柱体的表面积并输出到屏幕上。要求定义圆周率为如下宏常量 #define PI 3.14159 输入 输入两个实数,为圆柱体的底面半径r和高h。 输出 输出一个实数,即圆柱体的表面积,保留2位小数。 样例输入 42.1 71.6 样例输出 30076.14 import java.util.*;public cla
PLC-LiSLAM线-面-圆柱体-激光SLAM
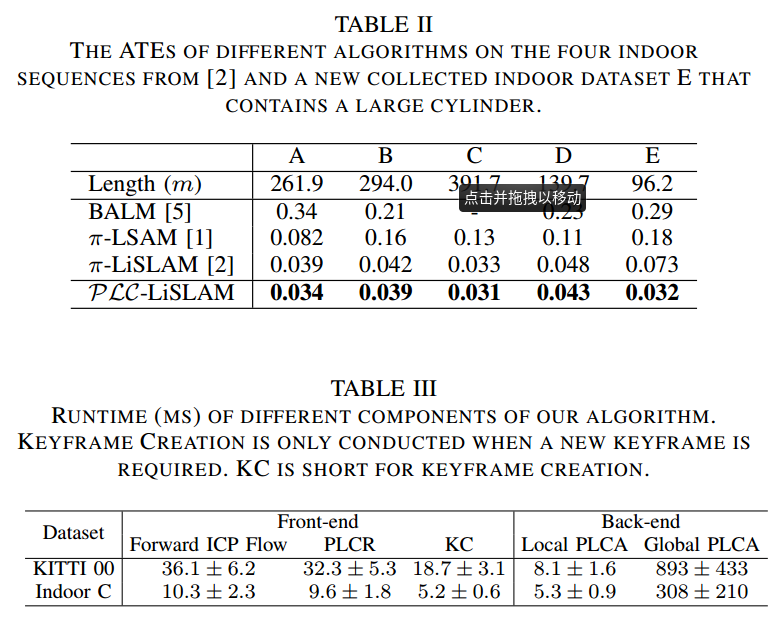
1. 摘要 平面、线段与圆柱体广泛存在于人造环境中。在本文中,我们提出了一个使用这些landmark的激光雷达SLAM系统。我们的算法有三个部分:局部建图、全局建图与定位。局部与全局建图模块通过最小化三维点到模型的残差来联合优化这些landmark的参数与位姿,这个过程我们称之为PLCA(plane-line-cylinder adjustment)。可以证明,通过一些预处理,PLCA问题与这些

圆柱体稳态温度分布 | 分离变量法(二)| 偏微分方程(十四)
今有无限长圆柱体 ( x 2 + y 2 < a 2 , − ∞ < z < + ∞ ) (x^2+y^2<a^2,-\infty<z<+\infty) (x2+y2<a2,−∞<z<+∞), 内部无热源,边界柱面温度保持为 F ( x , y ) F(x,y) F(x,y),求柱内稳态温度分布。 注意到圆柱的对称性及柱面温度分布与z无关,可设柱内温度为 u ( x , y ) u(x,y) u

Workbench网格划分 练习1圆柱体
今天根据软件功能顺序来学习并熟悉一下三种网格划分方法 1. 建立模型 首先画一个圆柱体,然后使用切割功能, 从底部平均切割成四部分 存为step格式 拖动建立fluent 拖动导入模型 并拖动模型导入fluent 2. 模型在ansys中的设置 打开DM并generate,看到四个独立parts,全选并重命名 全选并整合为一个实体,使产生拓扑关系,如图所示 初始划分如图所示
3ds MAX 扩展基本体,圆角长方体,圆角圆柱体
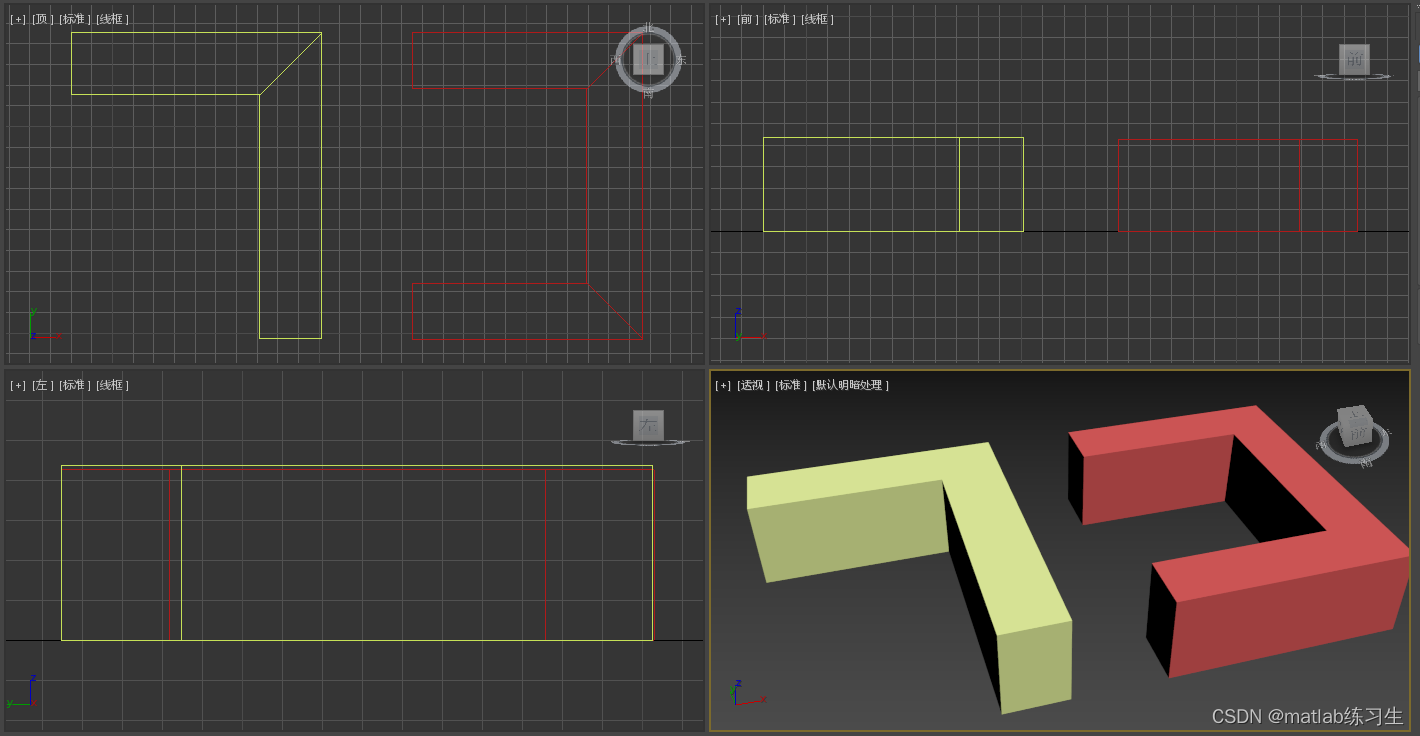
和之前讲过的基本体建模不同,圆角长方体和长方体不在同一类别下,需要在生成器中选择扩展基本体,如图: 选择对象类型为切角长方体,并按照绘制长方体的步骤拉伸 需要注意的是,第一次点击左键确定长方体的高后,并不会立刻完成,接下来随着鼠标移动改变的是圆角半径,如图: 可以在修改器中进一步修改具体参数: 切角圆柱体的绘制方式类似,常用于桌垫等图形绘制: 只要贴上萌萌哒的图片并选择

chatgpt赋能python:Python圆柱体表面积计算方法及其应用
Python圆柱体表面积计算方法及其应用 Python作为一种强大的编程语言,被广泛应用于各个领域,包括工程建模、数据分析和科学计算等。本文将介绍一种使用Python编写的圆柱体表面积计算方法,并探讨其在工程和物理学中的应用。 圆柱体表面积的定义和计算方法 圆柱体表面积是指圆柱体的所有表面积之和。对于一个底面半径为 r r r,高为 h h h的圆柱体,其表面积可以通过以下的公式进行计算:
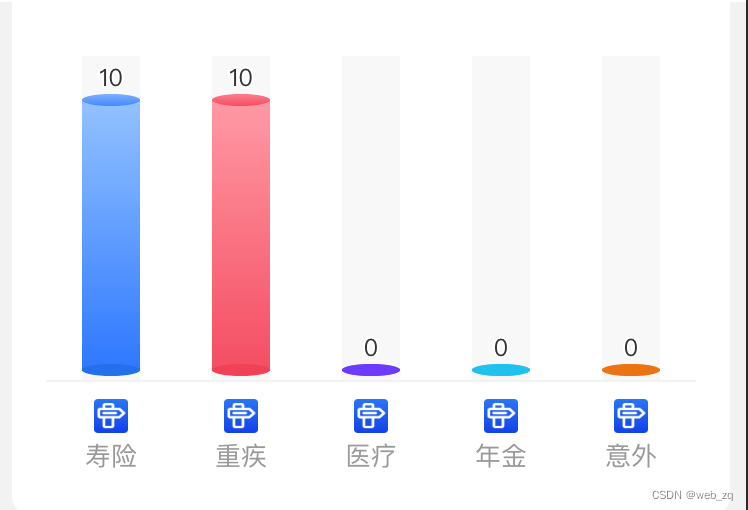
echarts实现圆柱体 渐变柱体
const weatherIcons = [ { lable: ‘寿险’, id: 2, img: require(@/assets/images/customerModule/title-action.png) }, { lable: ‘重疾’, id: 3, img: require(@/assets/images/customerModule/title-action.png) }, { l