先验专题

Unet改进10:在不同位置添加CPCA||通道先验卷积注意力机制
本文内容:在不同位置添加CPCA注意力机制 目录 论文简介 1.步骤一 2.步骤二 3.步骤三 4.步骤四 论文简介 低对比度和显著的器官形状变化等特征经常出现在医学图像中。现有注意机制的自适应能力普遍不足,限制了医学影像分割性能的提高。本文提出了一种有效的通道先验卷积注意(CPCA)方法,该方法支持通道和空间维度上注意权重的动态分布。通过采用多尺度深度卷积模块,有效地提取

噪声抑制中先验信噪比与后验信噪比的关系
噪声抑制算法中,谱减算法用的是后验证信噪比,维纳滤波器使用的是先验信噪比,MMSE(最小均方误差)算法既用到了先验信噪比,也用到了后验信噪比,那么,自然提出一个问题,在降噪过程中,先验信噪比与后验信噪比到底那个作用比较大。这个结论其实通过验证可以得出,先验信噪比是影响噪声抑制的主要参数,后验信噪比是辅助参数。 那么先验信噪比与后验信噪比它们之间又有什么关系,

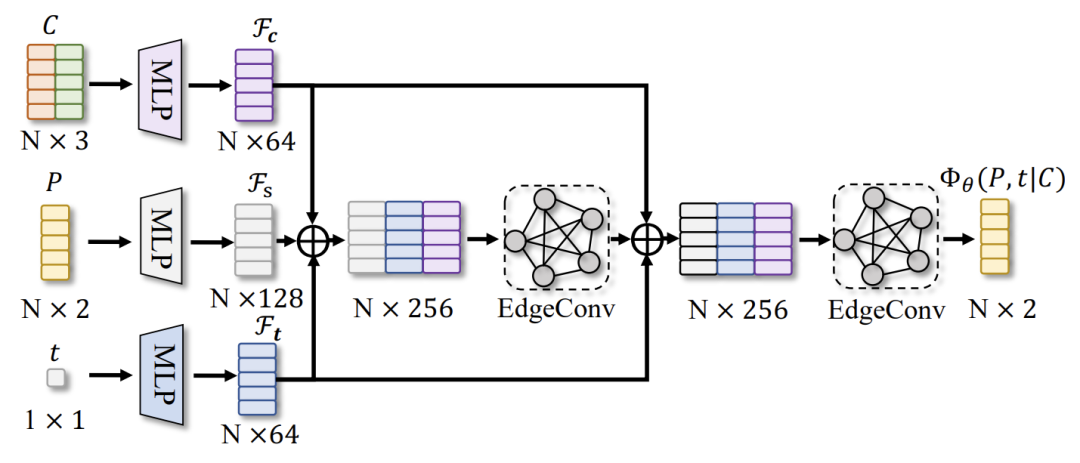
3D 生成重建014-Bidiff使用二维和三维先验的双向扩散
3D 生成重建014-Bidiff使用二维和三维先验的双向扩散 文章目录 0 论文工作1 论文方法2 效果 0 论文工作 大多数三维生成研究集中在将二维基础模型向上投影到三维空间中,要么通过最小化二维评分蒸馏采样(SDS)损失,要么通过对多视图数据集进行微调。由于缺乏显式的三维先验,这些方法经常导致几何异常和多视图不一致。近来研究人员试图通过直接在三维数据集上
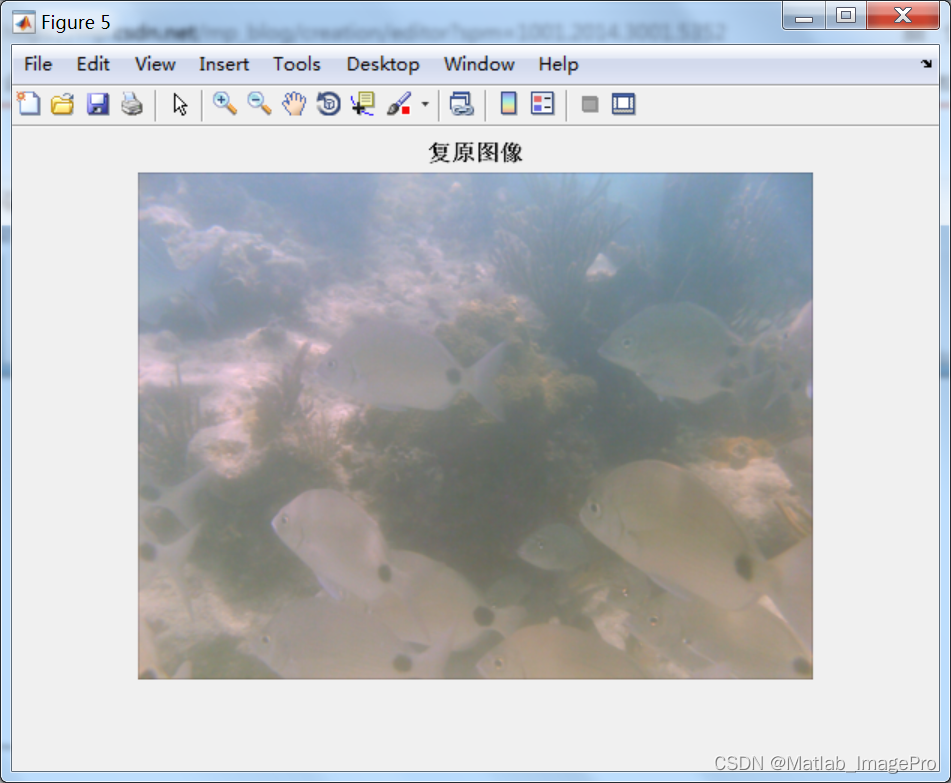
基于改进暗原色先验和颜色校正的水下图像增强,Matlab实现
博主简介: 专注、专一于Matlab图像处理学习、交流,matlab图像代码代做/项目合作可以联系(QQ:3249726188) 个人主页:Matlab_ImagePro-CSDN博客 原则:代码均由本人编写完成,非中介,提供有偿Matlab算法代码编程服务,不从事不违反涉及学术原则的事。 ~~~~~~~~~~~~~~~~~~~~~~~~~~~
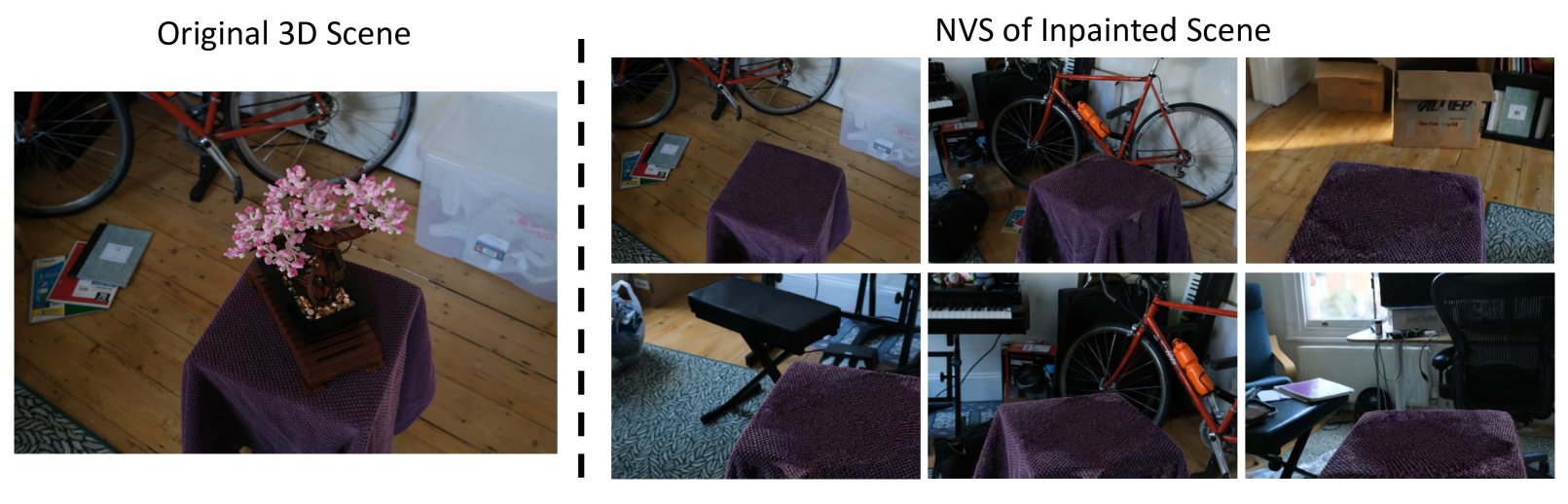
InFusion:通过从扩散先验学习深度完成来修复3D高斯
InFusion: Inpainting 3D Gaussians via Learning Depth Completion from Diffusion Prior InFusion:通过从扩散先验学习深度完成来修复3D高斯 Zhiheng Liu * 刘志恒 *1144Hao Ouyang * 欧阳浩 *2233Qiuyu Wang 王秋雨33Ka Leong Cheng 郑家亮2

共轭先验-Conjugate Prior
定义:如果先验分布和似然函数可以使得先验分布和后验分布有相同的形式,那么就称先验分布与似然函数是共轭的。 读数理统计学导论时,遇到过共轭先验的概念。 贝叶斯判别准则中,分别假设了先验分布 p(θ) p(\theta),后验分布 p(θ|X) p(\theta|X),以及 p(X),p(X|θ) p(X), p(X|\theta)似然函数。 贝叶斯定理可以写作: P(θ|X)=P(θ)P(
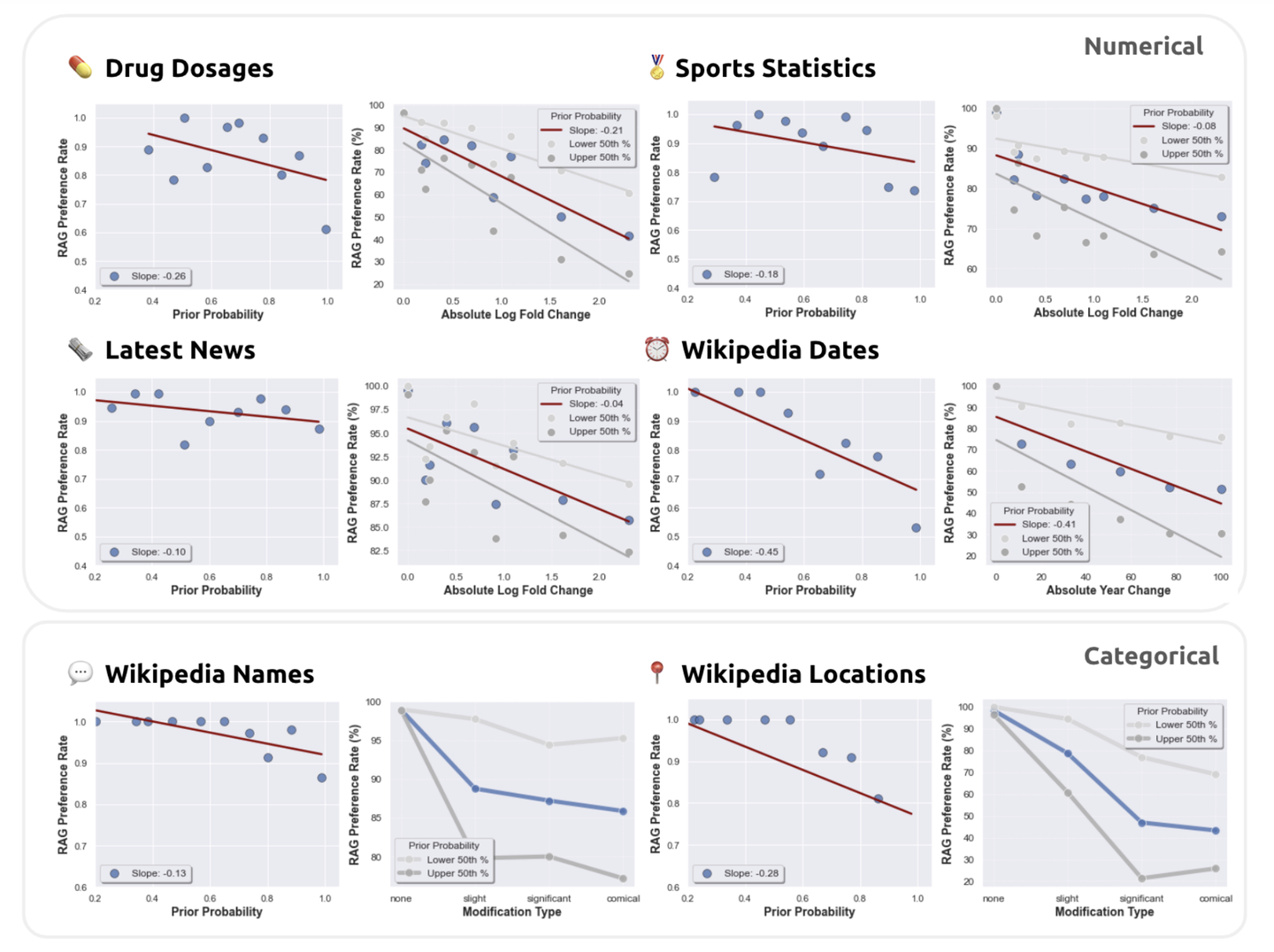
斯坦福:当RAG和大模型先验知识发生冲突
本文介绍了对提取增强生成(RAG)模型在与大模型(LLMs)的内部先验知识发生冲突时的表现进行系统分析。研究探讨了在信息冲突情况下,LLM是否能正确处理错误或忽视错误的检索内容。 👉 挑战和解决方式: 1️⃣ 挑战1:如何确保模型在面对错误检索内容时不会重复错误信息。这一挑战难在于模型的内部先验可能不够强大以抵抗错误信息的影响。通过增强模型的内部先验知识,提高模型识别和忽略错误信息的能力,可

全量知识系统 程序详细设计之 先验逻辑: “内在上的不确定性”的粗糙逻辑方法
Q1. 先从 全知系统中 的命名法和分类学 开始吧 好的,让我们从命名法和分类学的角度来探讨全知系统中的设计。 命名法 在全知系统中,命名法是一个至关重要的组成部分。它涉及到如何给系统中的各个元素、对象、模块等进行命名,以确保名称的清晰性、一致性和可理解性。 1. 清晰性:命名应该能够清晰地表达元素的含义和用途。例如,如果一个模块负责处理用户数据,那么它的名称应该能够清晰地反映出这一点。

经典文献阅读之--NoPe-NeRF(优化无位姿先验的神经辐射场)
0. 简介 在没有预先计算相机姿态的情况下训练神经辐射场(NeRF)是具有挑战性的。最近在这个方向上的进展表明,在前向场景中可以联合优化NeRF和相机姿态。然而,这些方法在剧烈相机运动时仍然面临困难。我们通过引入无畸变单目深度先验来解决这个具有挑战性的问题。这些先验是通过在训练期间校正比例和平移参数生成的,从而能够约束连续帧之间的相对姿态。这种约束是通过我们提出的新型损失函数实现的。对真实世界室

贝叶斯公式(先验/后验概率)
转自https://www.cnblogs.com/yemanxiaozu/p/7680761.html 前言 以前在许学习贝叶斯方法的时候一直不得要领,什么先验概率,什么后验概率,完全是跟想象脱节的东西,今天在听喜马拉雅的音频的时候突然领悟到,贝叶斯老人家当时想到这么一种理论前提可能也是基于一种人的直觉. 先验概率:是指根据以往经验和分析得到的概率.[1] 意思是说我们人有
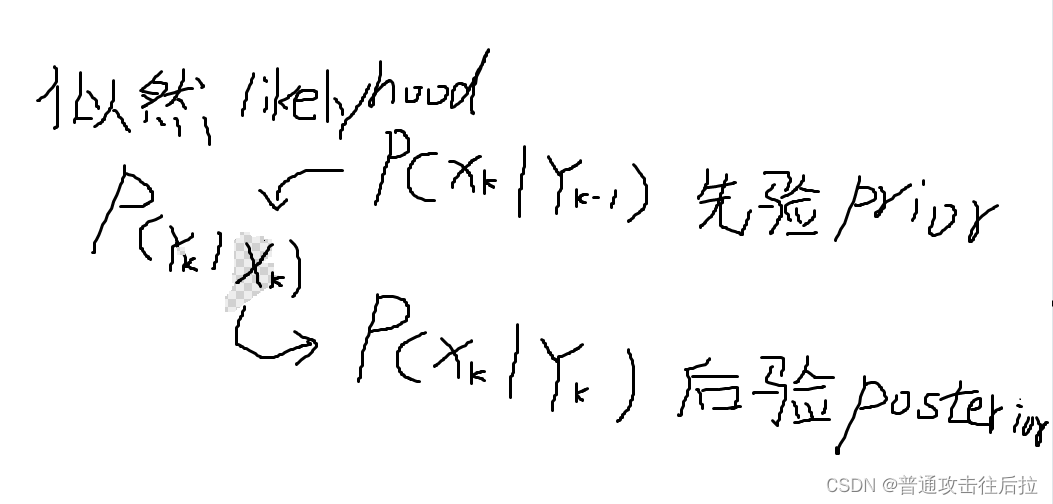
先验分布、后验分布、极大似然的一点思考
今天和组里同事聊天的时候,无意中提到了贝叶斯统计里先验分布、后验分布、以及极大似然估计这三个概念。同事专门研究如何利用条件概率做系统辨识的,给我画了一幅图印象非常深刻: 其中k表示时序关系。上面这个图表示后验分布是由先验分布与似然估计一同获得的。 我们经常在代码里给神经网络的最后一层的各个unit的概率值叫likelyhood,其实就是指在当前输入样本下输出各个logit的概率,其含义与极大似
![49、东北大学、阿尔伯塔大学:MVS-GCN多视角脑区、具有先验脑结构学习的图模型[GCN六元理论识别所有EEG!]](https://img-blog.csdnimg.cn/direct/7a68563ab7644e9c95cad3eb643a5d2a.png)
49、东北大学、阿尔伯塔大学:MVS-GCN多视角脑区、具有先验脑结构学习的图模型[GCN六元理论识别所有EEG!]
本文由东北大学医学图像智能计算教育部重点实验室,加拿大阿尔伯塔大学于2022年1.19日发表于<Computers in Biology and Medicine> JCR\IF: Q1\7.7 Abstract: 目的:近年来,脑功能网络(FBN)已被用于神经系统疾病的分类,如自闭症谱系障碍(ASD)。由于实验对象的高度异质性和脑网络中的噪声相关性,用FBN诊断神经系统疾病是一项具有挑战性的

规划器的先验唯心主义:从决策规划的视角来评估自动驾驶系统的感知能力
引言 本文提出了一个全新的框架,用于评价自动驾驶系统的感知能力,并在此基础上有效提升了感知性能和城市 NOA 能力。该框架充分考虑了微小感知噪声对规划结果的影响,并采用系统化的方法对感知能力进行评估和优化。实际应用结果表明,该方法显著提高了城市 NOA 的准确性、鲁棒性和响应能力,为用户提供了更高水平的自动驾驶体验。 论文标题: Transcendental Idealism of Plan
学习笔记(01):Windows版YOLOv4目标检测实战:训练自己的数据集-先验框聚类分析
立即学习:https://edu.csdn.net/course/play/28748/401686?utm_source=blogtoedu Try to set subdivisions=64 in your cfg-file. CUDA status Error: file: G:\AIfile\darknet\src\dark_cuda.c : cuda_make_array() : l

论文阅读:四足机器人对抗运动先验学习稳健和敏捷的行走
论文:Learning Robust and Agile Legged Locomotion Using Adversarial Motion Priors 进一步学习:AMP,baseline方法,TO 摘要: 介绍了一种新颖的系统,通过使用对抗性运动先验 (AMP) 使四足机器人在复杂地形上实现稳健和敏捷的行走。主要贡献包括为机器人生成AMP数据集,并提出一种教师-学生训练框架来学习稳健
从大模型中蒸馏功能性重排列任务的先验知识
导读 本文是VCC朱家辉同学对论文 Distilling Functional Rearrangement Priors from Large Models 的解读,该工作来自北京大学和中山大学,并已被发表在国际机器人顶会ICRA 2024上。 项目主页: https://sites.google.com/view/lvdiffusion/ 该工作提出了一种结合大语言模

Unsupervised Single Image Dehazing Using DarkChannel Prior Loss(使用暗通道先验损失的无监督单图像去雾)
概述: 由于收集匹配的清晰和模糊图像的固有限制,基于先验和基于学习的方法诉诸于综合数据的训练; 由室内图像和相应的深度信息构建。在处理室外场景时,这可能会导致域转移。我们提出了一种通过最小化众所周知的暗通道先验 (DCP) 能量函数的完全无监督的训练方法。我们不使用合成数据向网络提供,而是仅使用真实世界的户外图像,并通过直接最小化DCP来调整网络的参数。尽管我们的 “深度DCP”

高斯混合模型(GMM)先验的推断
GMM先验的优化方程 假设图像降质模型为: Y = A X + N Y=AX+N Y=AX+N,我们希望恢复 X X X通过解决一个最大后验问题。 max X P ( X ∣ Y ) = max X P ( Y ∣ X ) P ( X ) = min X − log P ( Y ∣ X ) − log P ( X ) \begin{aligned}\max\limits_
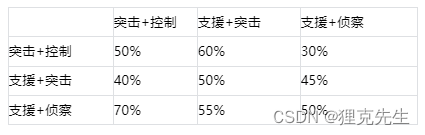
数据分析等于算命?基于纳什均衡的竞技游戏英雄数值设计先验模型
1.背景 最近在玩《战地1》,发现战地的角色设计还是很有意思的,不同于《彩虹六号》特色鲜明,和游戏策略强结合的干员技能,战地系列里面支援兵、医疗兵等不同兵种的能力是比较隐晦的,例如支援兵可以像突击兵一样往前猛冲,主要特点是供弹能力,刚玩的时候感觉没有什么兵种的感受,但是玩久了之后发现队伍缺了支援兵是真的不行的,侦察兵、医疗兵的强度会大大减弱 于是有了一个想法:能不能预先判断怎么样的兵种数值,可以
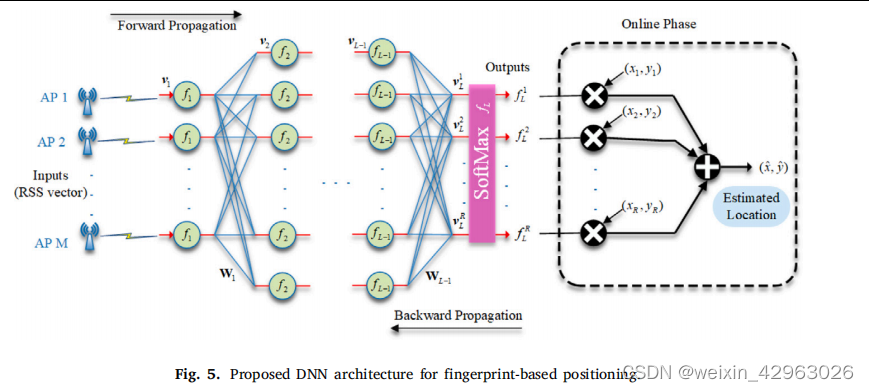
5.2 基于深度学习和先验状态的实时指纹室内定位
文献来源 Nabati M, Ghorashi S A. A real-time fingerprint-based indoor positioning using deep learning and preceding states[J]. Expert Systems with Applications, 2023, 213: 118889.(5.2_基于指纹的实时室内定位,使用深度学习和
剖析一下Mask R-CNN获得实例分割的这三个步骤。第一步,利用先验框获得建议框。第二步,利用建议框获得预测框。第三步,利用预测框获得语义分割结果。
问题描述: 剖析一下Mask R-CNN获得实例分割的这三个步骤。第一步,利用先验框获得建议框。第二步,利用建议框获得预测框。第三步,利用预测框获得语义分割结果。 问题解答: 生成建议框(Region Proposal): 使用特征金字塔网络(FPN)提取多尺度的特征图。在特征图上使用区域提议网络(RPN)生成一系列候选建议框。这些建议框通常是在不同尺度上提出的,并具有不同的长宽比。 生成

笔记1:基于锚框(先验框)的目标检测
一、边缘框(bounding box) 1.1 定义 边缘框:真实标注的物体位置 2.1 表示方式 1、(x1,y1)和(x2,y2) 2、(x1,y1)和w,h 二、锚框(anchor box)/先验框(prior bounding box) 2.1 定义 对边缘框的预测 2.2 预测方式 一般很难直接通过坐标数据预测边缘框,通常采用多个边缘框,当包含目标时,再慢慢调整。 第
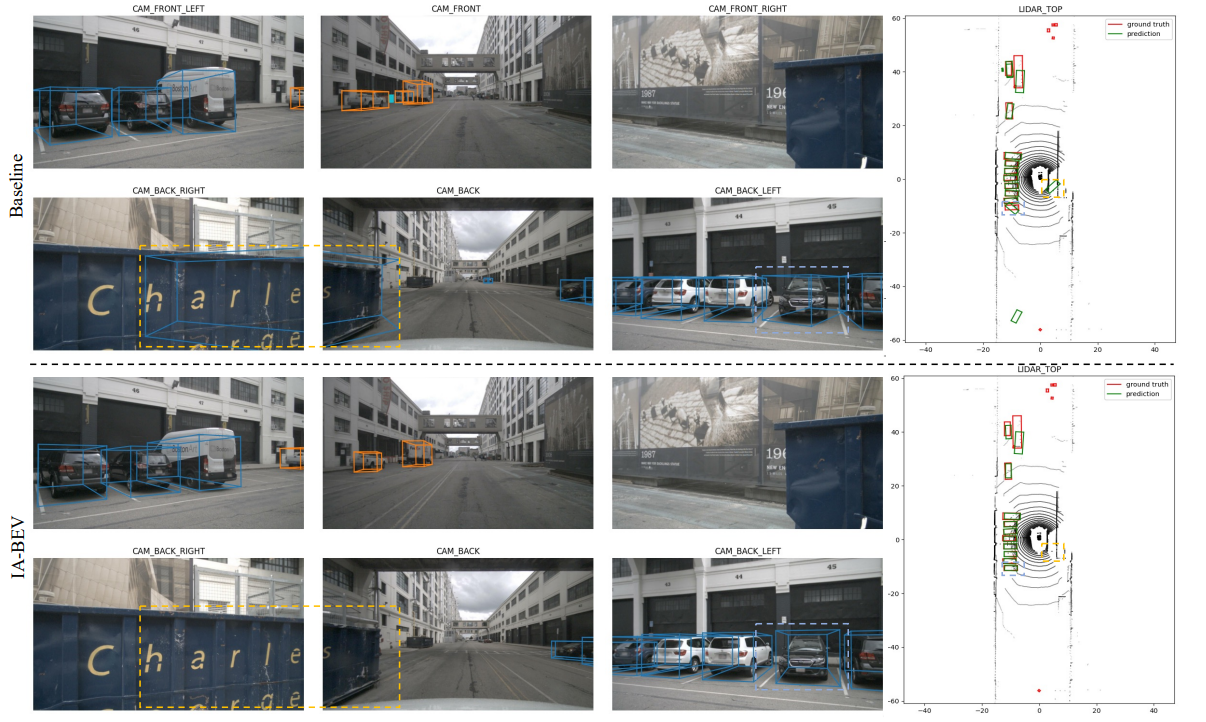
【三维目标检测】【自动驾驶】IA-BEV:基于结构先验和自增强学习的实例感知三维目标检测(AAAI 2024)
系列文章目录 论文:Instance-aware Multi-Camera 3D Object Detection with Structural Priors Mining and Self-Boosting Learning 地址:https://arxiv.org/pdf/2312.08004.pdf 来源:复旦大学 英特尔Shanghai Key Lab /美团 文章目录 系

pytorch实现DCP暗通道先验去雾算法及其onnx导出
pytorch实现DCP暗通道先验去雾算法及其onnx导出 简介实现ONNX导出导出测试 简介 最近在做图像去雾,于是在Pytorch上复现了一下dcp算法。暗通道先验去雾算法是大神何恺明2009年发表在CVPR上的一篇论文,还获得了当年的CVPR最佳论文。 实现 具体原理就不阐述了,网上的解析多的是,这里直接把用pytorch复现的代码贴出来: import torc
pytorch实现DCP暗通道先验去雾算法及其onnx导出
pytorch实现DCP暗通道先验去雾算法及其onnx导出 简介实现ONNX导出导出测试 简介 最近在做图像去雾,于是在Pytorch上复现了一下dcp算法。暗通道先验去雾算法是大神何恺明2009年发表在CVPR上的一篇论文,还获得了当年的CVPR最佳论文。 实现 具体原理就不阐述了,网上的解析多的是,这里直接把用pytorch复现的代码贴出来: import torc
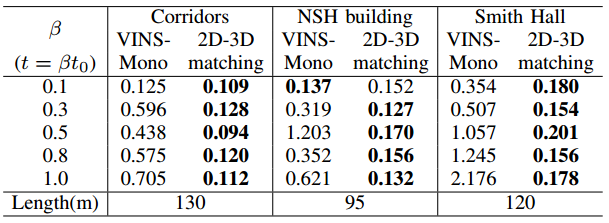
论文笔记_S2D.65_基于先验LIDAR点云地图的单目相机定位
目录 基本情况 摘要 主要内容 基于单目相机在LIDAR点云地图中定位的流程 A .2D-3D 的线提取 B .2D-3D 线段的匹配 C .线匹配和位姿的优化 实验 总结 基本情况 文章:Monocular Camera Localization in Prior LiDAR Maps with 2D-3D Line Correspondences作者:Huai Yu1