三轴专题
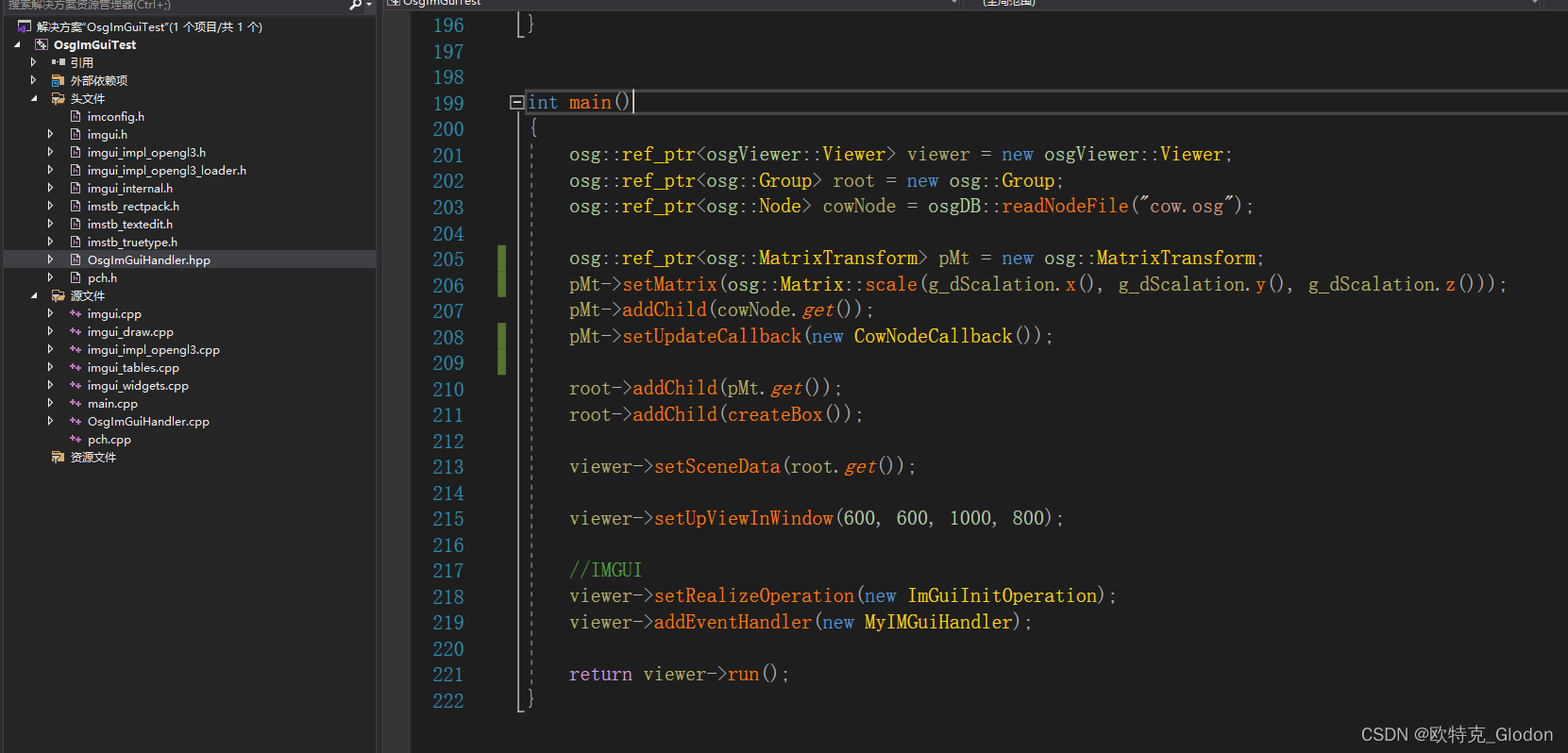
OSG编程指南<二十三>:基于OSG+ImGui制作模型编辑器,实现三轴方向的实时平移、旋转和缩放变化
1、概述 在OSG的开发应用过程中,我们有时候总会纠结于使用MFC还是Qt来嵌入OSG窗口以便于后续的功能开发,毕竟选择一个合适的UI框架,对于后续的开发还是省去很多麻烦的。但对于初学者来说,可能对框架消息机制的不熟悉,尤其是在做一些与场景互动的交互操作时候,耗费了大量时间在与OSG场景交互的实现上。如果有在使用osgearth库的开发者可能会发现源码带的示例中有osgearth_imgui
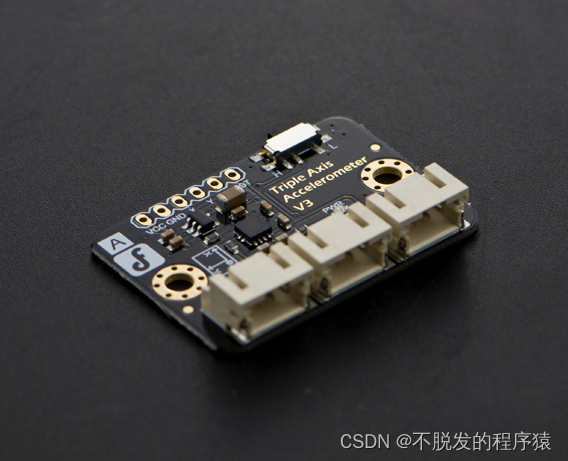
三轴 MEMS 加速度传感器
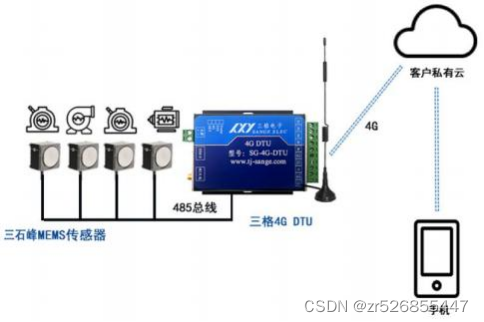
功能概述 本模块为了对电机、风机、水泵等旋转设备进行预测性运维而开发,只需一 个模块,就可以采集电机的 3 路振动信号(XYZ 轴)和一路温度信号,防护等 级 IP67 ,能够适应恶劣的工业环境。 传感器自动计算振动信号时域统计量:加速度峰值、峰峰值、有效值、峭度 指标、频率、速度有效值、以及设备的温度等,这些值写入到模组的 modbus 寄 存器,用户通过 PLC/服务器、DCS 系统
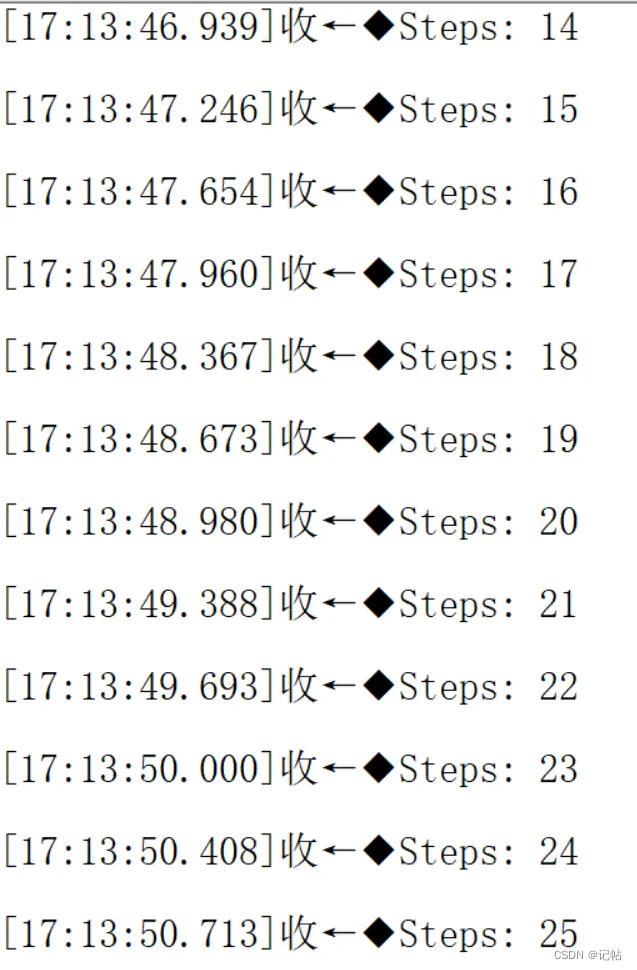
三轴加速度计LIS2DUX12开发(3)----计步器
三轴加速度计LIS2DUX12开发.3--轮询获取加速度数据 计步器硬件准备视频教学样品申请源码下载步数检测说明通信模式管脚定义IIC通信模式速率生成STM32CUBEMXIIC配置INT配置串口配置CS和SA0设置串口重定向参考程序初始换管脚获取ID复位操作BDU设置设置传感器的量程启用步数计和嵌入式功能配置步数检测中断引脚中断检测步数演示 计步器 最近在弄ST和瑞萨RA的课
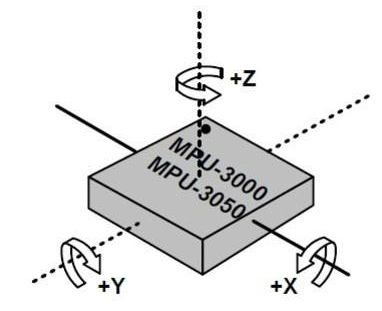
解决陀螺仪角度漂移问题 三轴陀螺仪和六轴陀螺仪的区别
陀螺仪角度漂移是指在使用陀螺仪时,由于各种误差和不完美的因素导致测量的角度随时间发生偏移。为了解决陀螺仪角度漂移问题,可以考虑以下几种方法:1.零位校准(Zero Calibration):陀螺仪在使用前可以进行零位校准,即在没有角速度输入时,将测量值归零。通过定期进行零位校准,可以减少角度漂移的影响。2.温度补偿(Temperature Compensation):陀螺仪的性能受环境温度的影响较
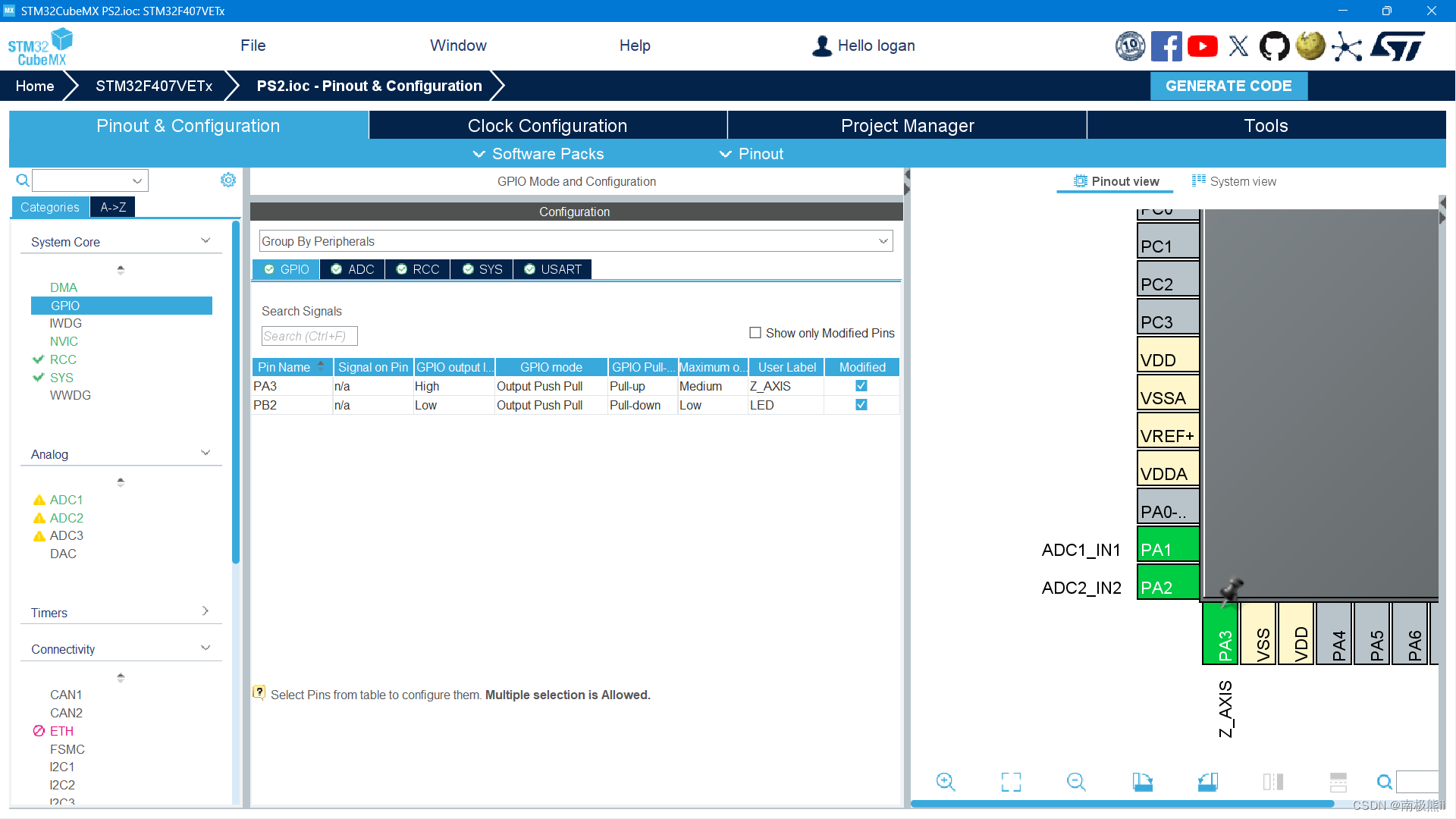
【STM32+HAL】三轴按键PS2摇杆
一、准备工作: 有关CUBEMX的初始化配置,参见我的另一篇blog:【STM32+HAL】CUBEMX初始化配置 有关定时器触发ADC模式配置,详见【STM32+HAL】ADC采集波形实现 二、所用工具: 1、芯片: STM32F407VET6 2、CUBEMX 3、IDE: MDK-Keil软件 4、STM32F4xxHAL库 三、实现功能: 读取x,y轴的偏移量(
三轴加速度计LIS2DUX12开发(1)----轮询获取加速度数据
三轴加速度计LIS2DUX12开发.1--轮询获取加速度数据 概述硬件准备视频教学样品申请源码下载通信模式管脚定义IIC通信模式速率生成STM32CUBEMX串口配置IIC配置CS和SA0设置串口重定向参考程序初始换管脚获取ID复位操作BDU设置设置传感器的量程轮询获取加速度演示 概述 最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。 本文将介绍如

可能是最便宜的姿态传感器,国产三轴加速度计SC7A20
可能是最便宜的姿态传感器 三轴检测 批量参考价格:整盘单价:¥1.242,一个包装10K,希望厂家能出点数量少的包装,这一盘太多了:) 特点 宽电压范围 1.71V-3.6V 1.8V 兼容数字 IO 口 低功耗模式下电源电流低至 2µA ±2G/±4G/±8G/±16G 动态全量程范围 12bit 有效数据(HR) I²C/SPI 数字输出接口 6D/4D 方向检测 自由落体检测 单击双

MPU6050基本读写和移植DMP读出三轴
文章目录 引言简述一下mpu6050和stm32的一些坑吧MPU6050 I2C读写MPU6050 初始化读取内部温度传感器读取陀螺仪DMP的移植读取三轴角度结语 引言 最近玩了IMU模块,看了很多的博客,从无到有。包含了一些我调试代码的过程,分享一些坑吧, 很多都是读不出来啥的,其实模块一般没啥问题,我会一步一步地教大家怎么排除常见问题。 我是参考正点原子的代码,因为他们没教

三轴地磁方位角原理及代码实现
开发平台:Arduino 控制板:Mbsbot-Mega2560版本 姿态传感器:GY85九轴模块 实现目标: 通过地磁计模块获取姿态角,位移量,估算当前相对位移 1.获取地磁计方位角 库函数获取地磁计原始数据 float* magScaled = sen10724.readMagScaled();max_x = max(magScaled[0], max_x);min_x =

EKF+CDKF两个滤波的MATLAB程序,估计三轴位置,带中文注释
背景 CDKF(中心差分卡尔曼滤波)是一种值得关注的确定性采样方法。与UKF(无迹卡尔曼滤波)不同,CDKF选取采样点的方式基于Sterling多项式插值公式,并以中心差分形式逼近非线性函数,达到至少2阶的近似精度。 CDKF的精度与UKF相当,但只需调整一个参数h。因此,在目标跟踪、导航系统等领域,CDKF都有良好的应用前景 。 源码 % EKF+CDKF效果对比% author:Ev

三轴机械手臂定位坐标转脉冲基本原理(自学笔记,非专业性)
以下为本人自学时摸索的简单算法原理,可能缺乏一些专业性,一些地方可能存在问题,仅供查考,如果可以请多多指教,麻烦指出告知。 目的:将坐标转换成角度(角度可以根据脉冲比值,转换成脉冲) 基本数学原理:投影,cos求角公式,三角函数,三角形,二维坐标系等 如上图所示(图片比较简陋请见谅),上图为原先思考使用的综合图。a,b,c分别为机械手臂三轴的长度,a+b+c为机械手臂三轴总长度。 如图,O点位

三轴陀螺仪与加速度计如何辅助Iphone定位
原文地址:http://www.aiw3.com/iphone/0520987.html 三轴陀螺仪与加速度计如何辅助Iphone定位 三轴陀螺仪与加速度计如何辅助Iphone定位内容导读: 去年的6月8日,伟大的苹果公司发布了最新一代iPhone 4G,这款新机器有很多硬件方面的升级,其中对游戏玩家来说来说,最大的一个“三轴陀螺仪”!... 去年的6月8日,
e2studio开发三轴加速度计LIS2DW12(3)----检测活动和静止状态
e2studio开发三轴加速度计LIS2DW12.3--检测活动和静止状态 概述视频教学样品申请源码下载新建工程工程模板保存工程路径芯片配置工程模板选择时钟设置UART配置UART属性配置设置e2studio堆栈e2studio的重定向printf设置R_SCI_UART_Open()函数原型回调函数user_uart_callback ()printf输出重定向到串口IIC属性配置初始换

M-A352AD10高精度三轴加速度计
一般描述 M-A352是一种三轴数字输出加速度计,具有超低噪声、高稳定性、低功耗等特点,采用了夸特的精细处理技术。. 多功能M-A352具有高精度和耐久性,非常适合广泛的具有挑战性的应用,如SHM、地震观测、工业设备的状态监测和工业机械(即生态教学机械/附件、农业机械/工具、机器人)的姿态检测。 特点 超低噪声:0.2µG/√Hz类型。 提高了抗冲击能力:1000克 可选择的

e2studio开发三轴加速度计LIS2DW12(4)----测量倾斜度
e2studio开发三轴加速度计LIS2DW12.4--测量倾斜度 概述视频教学样品申请源码下载计算倾斜角度工作原理单轴倾斜检测双轴倾斜检测三轴倾斜检测通信模式管脚定义IIC通信模式速率新建工程工程模板保存工程路径芯片配置工程模板选择时钟设置UART配置UART属性配置设置e2studio堆栈e2studio的重定向printf设置R_SCI_UART_Open()函数原型回调函数user

【CNC三轴基础知识以及画图】
一、如何辨别三轴、3+1轴、五轴之间的区别 三轴、3+1轴、五轴是指机器人或机械设备的运动轴数。它们的区别在于可以实现的运动自由度和适用范围。 三轴:指机器人或机械设备具有三个独立的运动轴,通常包括X轴、Y轴和Z轴。这种结构适用于简单的平面运动和简单的3D空间运动,例如在数控机床和3D打印机中常见。 3+1轴:指机器人或机械设备具有三个独立的线性轴和一个旋转轴。这种结构在三轴的基础上增加了
三轴加速度计LIS2DW12开发(2)----基于中断信号获取加速度数据
三轴加速度计LIS2DW12开发.2--轮基于中断信号获取加速度数据 概述视频教学样品申请生成STM32CUBEMX串口配置IIC配置CS和SA0设置INT1设置串口重定向参考程序初始换管脚获取ID复位操作BDU设置开启INT1中断设置传感器的量程配置过滤器链配置电源模式设置输出数据速率中断判断加速度数据状态演示 概述 本文将介绍实时获取和处理加速度数据。程序的核心流程包括初始
三轴加速度计LIS2DW12开发(2)----基于中断信号获取加速度数据
三轴加速度计LIS2DW12开发.2--轮基于中断信号获取加速度数据 概述视频教学样品申请生成STM32CUBEMX串口配置IIC配置CS和SA0设置INT1设置串口重定向参考程序初始换管脚获取ID复位操作BDU设置开启INT1中断设置传感器的量程配置过滤器链配置电源模式设置输出数据速率中断判断加速度数据状态演示 概述 本文将介绍实时获取和处理加速度数据。程序的核心流程包括初始

咸鱼ZTMR实例—OLED三轴加速
咸鱼ZTMR实例—OLED三轴加速 MMA7660FC加速度传感器基本使用 MMA7660FC MMA7660FC可在六个方向定制垂直水平座向 集成了众多智能的运动功能,如方向、震动和敲击检测集成了众多智能的运动功能,如方向,震动和敲击检测 自动唤醒休眠功能自动唤醒休眠功能 包括智能电源管理功能包括智能电源管理功能 ZTMR 上集成了一款三轴加速度计芯片(MM

基于单片机设计的电子指南针(LSM303DLH模块(三轴磁场 + 三轴加速度)
一、前言 本项目是基于单片机设计的电子指南针,主要利用STC89C52作为主控芯片和LSM303DLH模块作为指南针模块。通过LCD1602液晶显示屏来展示检测到的指南针信息。 在日常生活中,指南针是一种非常实用的工具,可以帮助我们确定方向,特别是在户外探险、航海、定位等场景中。传统的磁罗盘指南针存在一些不便之处,如体积较大、不易携带、容易受到外界干扰等。设计一款基于单片机的电子指南针是比较有
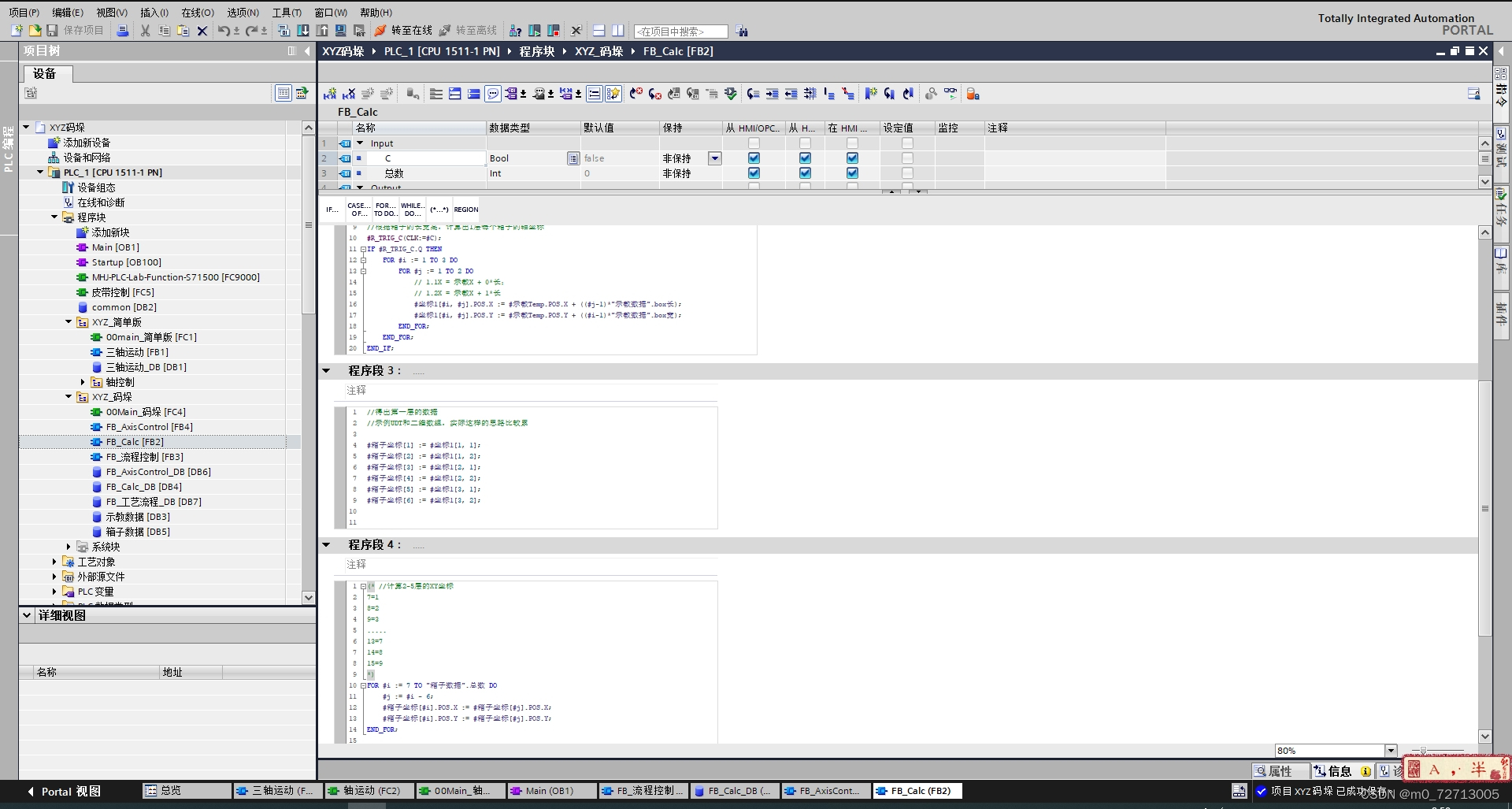
FactoryIO程序三轴码垛,仿真实验程序 使用简单的梯形图与SCL语言编写,通俗易懂,写有详细注释
FactoryIO程序三轴码垛,仿真实验程序 使用简单的梯形图与SCL语言编写,通俗易懂,写有详细注释,起到抛砖引玉的作用,比较适合有动手能力的入门初学者。 电机不是伺服电机,是仿真平台提供的固定控制方法,比如数字量、模拟量、二进制编码。 软件环境: 1、西门子编程软件:TIA Portal V16(博图V16) 2、FactoryIO 2.4 内容清单: 1、FactoryIO中文说明书+场景模
基于51单片机的三轴机械臂控制系统(PWM)
2021年参加校内电子竞赛所做的课题,发出来留作纪念,也希望能对大家有所帮助。 此项目获得了校电赛三等奖: ) 1系统方案 1.1 控制系统的论证与选择 方案一:使用纯模拟电路控制,利用三极管的通断,一些模拟集成电路(电压比较器、RC延时电路、NE555芯片等)来实现对电机的延时控制,从而达到机械手的各方向移动,并且通过改变延时时间来决定机械手的移动幅度。 分析:纯模拟电路控制理论上
Arduino驱动FXLN83XXQ三轴加速度传感器(惯性测量传感器篇)
目录 1、传感器特性 2、控制器和传感器连线图 3、驱动程序 FXLN83XXQ系列是款低功耗,高精度三轴加速传感器,拥有其类别中最高的带宽(2.7kHz),并且模拟输出,兼容性广泛。

iepe三轴振动传感器icp压电式加速度传感器网络采集模块
信息社会的发展,在很大程度上取决于信息与信号处理技术的先进性。数字信号处理技术的出现改变了信息与信号处理技术的整个面貌,而数据采集作为数字信号处理的必不可少的前期工作在整个数字系统中起到关键性、乃至决定性的作用,其应用已经深入到信号处理的各个领域中。实时信号处理、数字图像处理等领域对高速度、高精度数据采集卡的需求越来越大。总线由于其传输速度的限制而逐渐被淘汰。我公司推出的IBF288-IEPE-R

Arduion 驱动 ADXL335三轴加速度计模块
Arduion 驱动 ADXL335三轴加速度计模块 简介电气参数原理图接线代码实验结果 简介 ADXL335是一个小,薄,低功率,完整的三轴加速度计,具有信号调节电压输出。该产品测量加速度的最小全尺度范围为±3 g。它可以测量倾斜传感应用中重力的静态加速度,以及由运动、冲击或振动产生的动态加速度。 电气参数 供电电源3~5 V供电电流400uA通信接口模拟量输出工作温度