vio专题

Xilinx系FPGA学习笔记(四)VIO、ISSP(Altera)及串口学习
系列文章目录 文章目录 系列文章目录VIO(Vivado)ISSP(Altera)串口学习FPGA串口发送FPGA串口接收 VIO(Vivado) VIO 的全称叫 Virtual Input/Output,建立一个虚拟的输入/输出信号,可以对需要调试的模块的输出信号的数值进行在线的查看,以及模拟一些信号输给需要调试模块,方便调试查找问题和验证模块的实际上板工作的正确
vivado HW_VIO
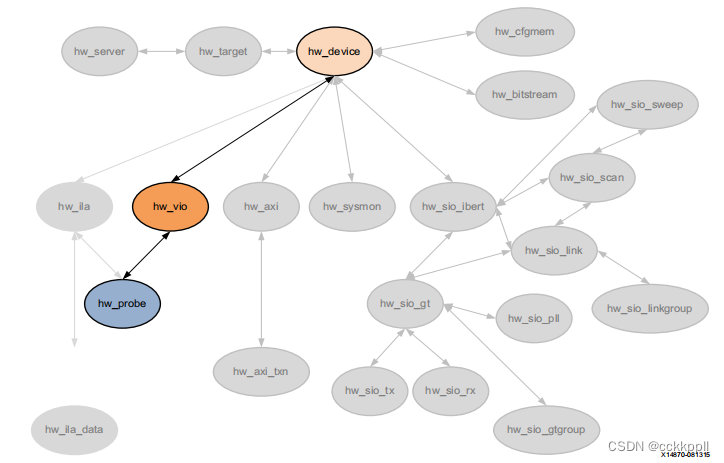
描述 虚拟输入/输出(VIO)调试核心hw_VIO可以监视和驱动内部 在编程的XilinxFPGA上实时显示信号。在没有物理访问的情况下 目标硬件,可以使用此调试功能来驱动和监视 存在于物理设备上。 VIO核心具有硬件探测器hw_probe对象,用于监视和驱动特定信号 关于设计。输入探针监视作为VIO核心输入的信号。输出探针驱动 从VIO核心向指定值发送信号。探针上的值是使用定义的 set_pro
基于EBAZ4205矿板的图像处理:03使用VIO调试输出HDMI视频图像
基于EBAZ4205矿板的图像处理:03使用VIO调试输出HDMI视频图像 在zynq调试时VIO是真的方便,特此写一篇博客记录一下 先看效果 项目简介 下面是我的BD设计,vtc用于生成时序,注意,2021.2的vivado的vtcIP是v6.2版本,多了一个sof_state,我不太清楚他是干嘛的,实测没接也一切正常。 VIO IP核用于实时调试数据,我们可以在progra
VIO外参标定方法总结
一、前言 VIO外参标定是指相机和IMU之间的转移矩阵的确定,包括3×3的旋转矩阵和3维平移向量。整体上分为离线标定和在线标定两类方法,这篇文章做一个总结,主要是经典的方法,记录其思想。 二、博文链接 1、离线标定方法 最基本的当然就是人工手动标定了,但这样不仅费力,并且误差大不够准确,作为初始猜测还可以。 VIO最知名的离线标定工具就是Kalibr了。 GitHub - ethz-a
vivado 设置 VIO 核以执行测量、查看 VIO 核状态
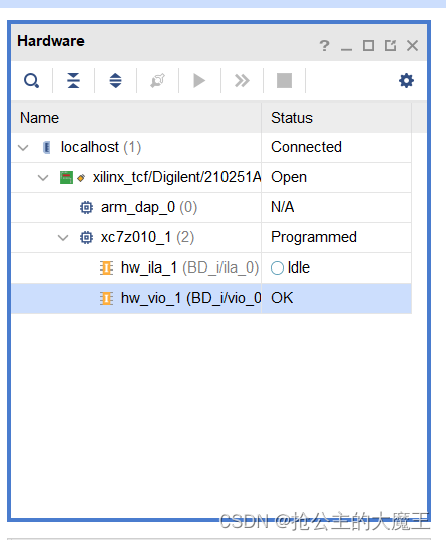
设置 VIO 核以执行测量 您添加到自己的设计中的 VIO 核会显示在“硬件 (Hardware) ”窗口中的目标器件下。如果未显示这些 VIO 核 , 请右键 单击器件并选择“ Refresh Hardware ”。这样将重新扫描 FPGA 或 ACAP 并刷新“ Hardware ”窗口。 注释 : 如果编程和 / 或刷新 FPGA 或

VIO第5讲:后端优化实践
VIO第5讲后端优化实践:逐行手写求解器 文章目录 VIO第5讲后端优化实践:逐行手写求解器1 非线性最小二乘求解流程1.1 H矩阵不满秩的解决办法1.2 H矩阵的构建1.2.1 确定维度1.2.2 构建海塞矩阵 1.3 初始化μ—LM算法1.4 求解线性方程1.4.1 非SLAM问题—求逆1.4.2 SLAM问题—舒尔补① 根据pose和landmark分块② 舒尔补③ 求解线性方程组

VIO第4讲:基于滑动窗口法的vio系统可观性与一致性
VIO第4讲基于滑动窗口算法的 VIO 系统:可观性和一致性 文章目录 VIO第4讲基于滑动窗口算法的 VIO 系统:可观性和一致性1 从高斯分布到信息矩阵1.1 SLAM和高斯分布1.2 协方差矩阵与信息矩阵 2 舒尔补应用:边际概率、条件概率2.1 舒尔补2.2 舒尔补的应用2.2.1 结论12.2.2 结论22.2.3 总结 3 滑动窗口算法与边缘化 Marginalization

VIO标定开源工具Kalibr源码笔记
Kalibr 构造样条,与秦开怀老师的公式比较,秦老师的仅仅分析标量,coeff在最后,U在最前: r = c o e f f ∗ B a s i s M a t r i x ∗ U r=coeff*BasisMatrix*U r=coeff∗BasisMatrix∗U coeff需要多个列构成。 aslam_backend实现优化。 knots即节点,是控制分段的点。 Bsplin

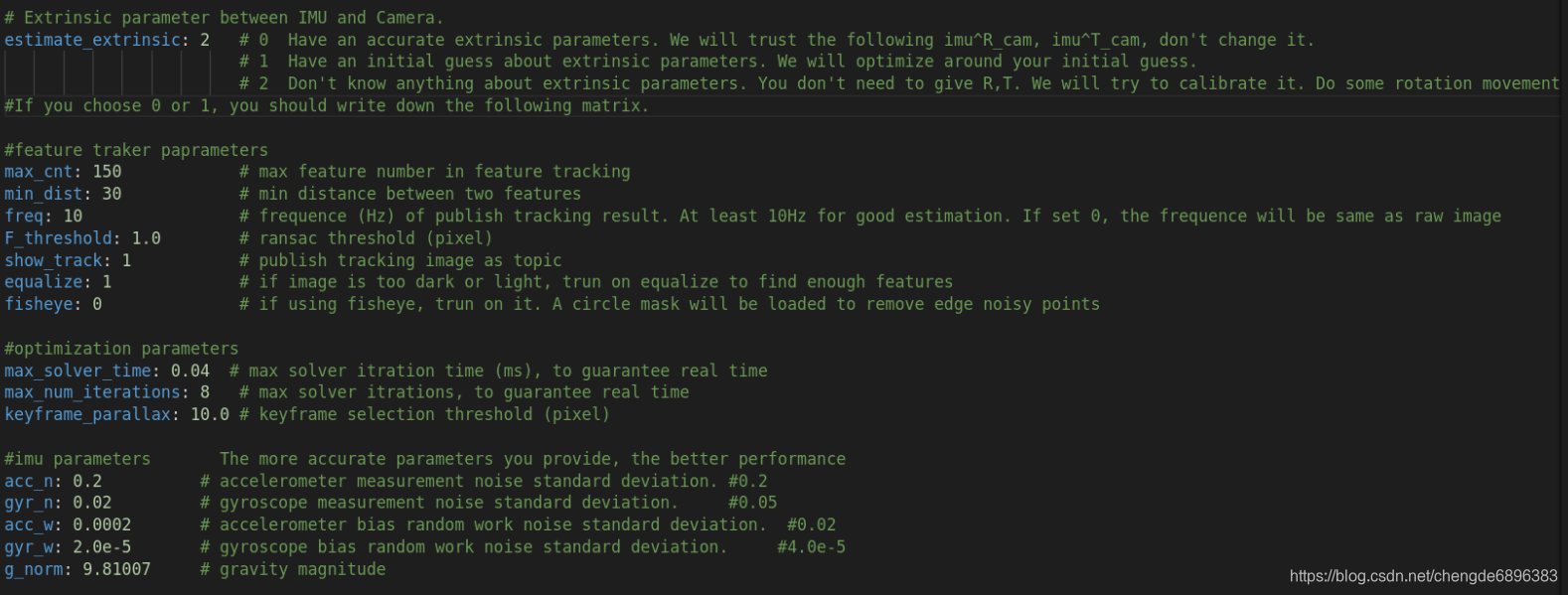
vio参数文件内相机imu参数的修改
imu标定工具 https://github.com/mintar/imu_utils 网络上有各种IMU校准工具和校准教程,曾经花费了巨大精力跟着各种教程去跑校准。 然而,标定使用的数据都是在静止状态下录制的,我们在使用vio或者imu-cam联合标定的时候,imu确是处于动态运动状态,如果直接使用静态标定出来的参数会很容易造成vio的崩溃漂移。标定出来的imu只能当作一个参考。 其实做不
VINS学习笔记之一: 开篇,从vio标定开始
今天是庚子鼠年腊月二十九,也是今年的最后一个工作日,大部分同事都回家了或在回家的路上了,无心干活,那就干点自己喜欢的事情吧 :) 前段时间乘着年底不忙整理了下VIO以及在线标定相关的论文和开源代码,下载好了著名的VINS-Mono,一直没有精力开始学习的进程,正好今天给即将到来的辛丑牛年做个学习开篇吧,给来年的学习进步开个好彩头,哈哈 VINS的demo是从Euroc数据集开始的,config
msckf-vio 跑Euroc数据集,并用evo进行评估
所需材料: Euroc数据集主页:https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasetsevo评估工具代码:https://github.com/MichaelGrupp/evo向msckf-vio中添加保存位姿的代码,可参考https://blog.csdn.net/xiaoxiaoyikesu/

Auterion PX4 VIO代码分析
也就是PX官方文档给的VIO代码,用的T265 也是之前在github里面搜PX4 T265搜到的 https://github.com/Auterion/VIO/blob/master/src/nodes/px4_realsense_bridge.cpp 这里写着发布里程计话题消息 这个函数的输入是里程计信息,我估计就是接受到里程计信息,然后发布里程计信息。(莫非是中间做 一
我感觉我自己基于pnp原理可以自己写个简单的SLAM了,而且还是VIO的。是的,可以自己推出。
我感觉我自己基于pnp原理可以自己写个简单的SLAM了,而且还是VIO的。 是的,可以自己推出。 我们就把二维码泛化成普通的东西,只是我们不知道边长,如果我们知道了,那就可以用pnp的原理倒推出相机的位姿。 这个边长比如我们是不是可以通过双目深度图得到?这样不就很多问题解决了!!!!! 自己这样就可以推导出一个SLAM了!!! 加上有IMU可以感知自己位姿的

VINS_FUSION入门系列---GPS与VIO融合
转载自:https://blog.csdn.net/pj_find/article/details/106566838 VINS_FUSION入门系列---GPS与VIO融合 pj_find 2020-06-05 14:32:28 878 收藏 7 文章标签: 自动驾驶 版权 参考的博客:https://blog.csdn.net/subiluo/article/details/10
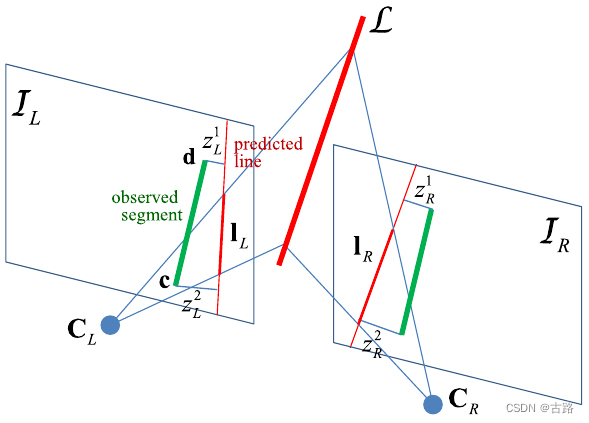
pl_vio线特征·part I
pl_vio线特征 0.引言1.LineFeatureTracker核心逻辑解读2.estimator_node中线段的处理2.1.订阅信息解压2.2.线特征管理 3.线段的表示与三角化3.1.普吕克线坐标3.2.正交表示 4.线段残差对位姿的导数4.1.直线的观测模型和误差4.2.误差雅克比推导 0.引言 pl_vio线特征·part II PL-VIO,本文关注线段。

深蓝学院视觉SLAM进阶:从零开始手写VIO
课程大纲 第1章:概述与课程介绍第2章:IMU传感器&IMU预积分与视觉信息融合第3章:滑动窗口算法理论与实践第4章:视觉前端第5章: VINS系统构建第6章:课程总结+V:jevnopark 第1章:概述与课程介绍 第1节: 概述与课程介绍 第2章:IMU传感器&IMU预积分与视觉信息融合 第1节: IMU传感器第2节: 基于优化的IMU预积分与视觉信息融合 第
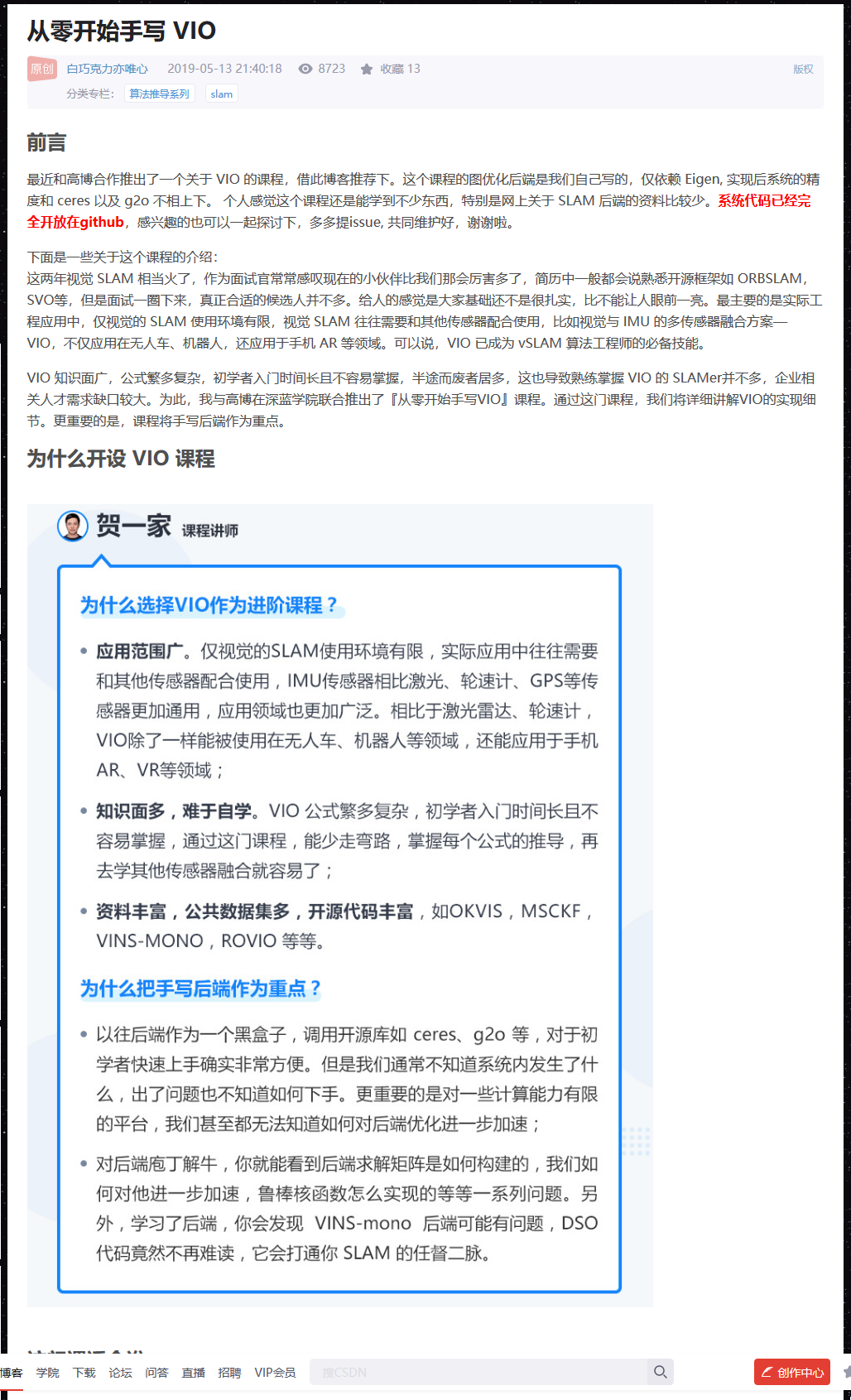
现在再回看这段话就感觉很平常了,里面很多算法名词都比较熟悉了,关于手写VIO的课。
现在再回看这段话就感觉很平常了,里面很多算法名词都比较熟悉了,不会觉得会ORBSLAM有多什么什么。这可能是这些天我弄无人机+SLAM给我带来的吧。特别是小觅。所以我觉得直接做个项目还是有好处的。你单纯直接啃书可能会卡在一些细节卡很久。做东西能先带给你一些具象的感受带给你一些信心。你再去回看书本感觉也会好些。你会觉得ROS也不过如此,opencv也不过如此。当然其实书本上还有很多需要学的,只

TUM VIO数据集介绍与尝试 The TUM VI Benchmark for Evaluating Visual-Inertial Odometry论文翻译
前言 做SLAM或是CV方向的应该大都接触过TUM提供的各种数据集,如RGBD数据集、单目数据集等。最近TUM发布了关于VIO即视觉惯性状态估计的对应数据集,成为了继飞行数据集EuRoc、MAV、车辆数据集Kitti等之后的又一个常用大型数据集。 本博客将就其数据集的论文《The TUM VI Benchmark for Evaluating Visual-Inertial Odometry》对
【深蓝学院】手写VIO第8章--相机与IMU时间戳同步--作业
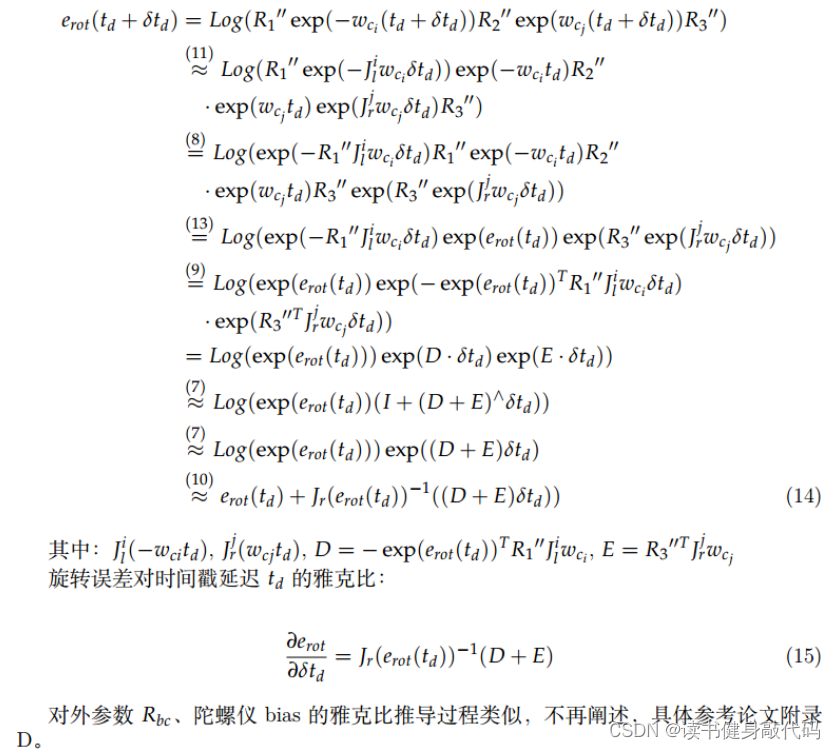
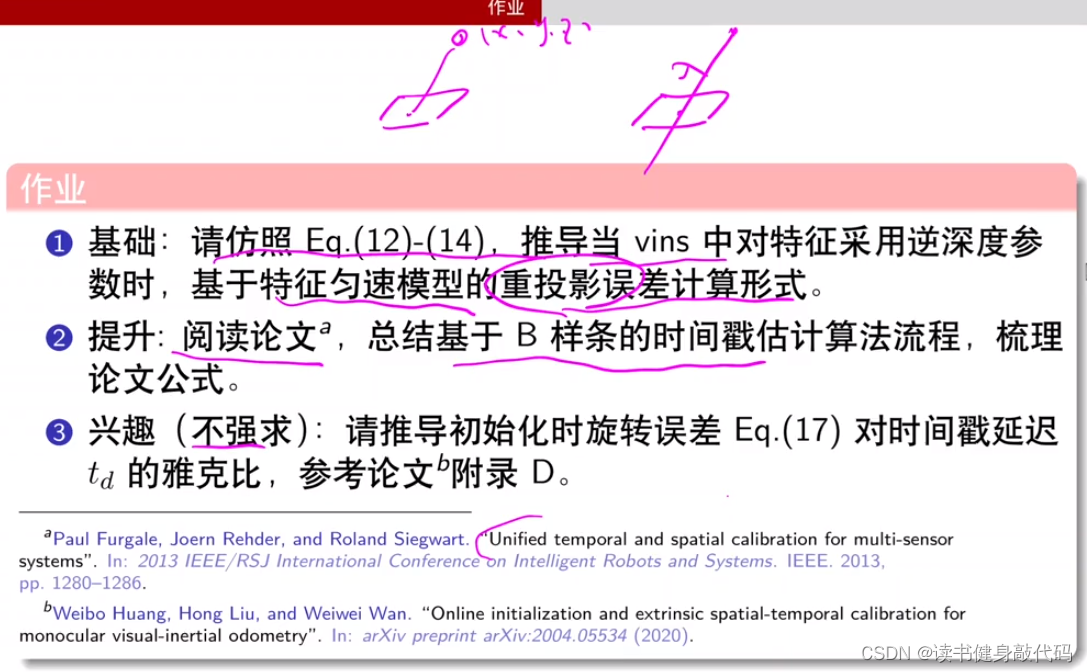
0. 题目 1. T1 逆深度参数化时的特征匀速模型的重投影误差 参考常鑫助教的答案:思路是将i时刻的观测投到world系,再用j时刻pose和外参投到j时刻camera坐标系下,归一化得到预测的二维坐标(这里忽略了camera的内参,逆深度是在camera系下) 要计算的是i时刻和j时刻之间的补偿之后的u坐标的重投影误差,所以i时刻也要补偿,具体步骤见下,式(5)参照14讲P47的公式,
【深蓝学院】手写VIO第8章--相机与IMU时间戳同步--作业
0. 题目 1. T1 逆深度参数化时的特征匀速模型的重投影误差 参考常鑫助教的答案:思路是将i时刻的观测投到world系,再用j时刻pose和外参投到j时刻camera坐标系下,归一化得到预测的二维坐标(这里忽略了camera的内参,逆深度是在camera系下) 要计算的是i时刻和j时刻之间的补偿之后的u坐标的重投影误差,所以i时刻也要补偿,具体步骤见下,式(5)参照14讲P47的公式,
vslam论文24:ESVIO: 基于事件相机的双目VIO(RAL 2023)
摘要 异步输出低延迟事件流的事件相机为具有挑战性的情况下的状态估计提供了很大的机会。尽管近年来基于事件的视觉里程测量技术得到了广泛的研究,但大多数都是基于单目的,而对立体事件视觉的研究很少。在本文中,我们介绍了ESVIO,这是第一个基于事件的立体视觉惯性里程计,它利用了事件流、标准图像和惯性测量的互补优势。我们建议的pipeline包括ESIO(纯基于事件的)和ESVIO(带有图像

MIT Kimera-VIO-ROS 安装
前言 我安装Kimera-VIO-ROS的时间是2023.10.28。由于已经离Kimera发布过去两年,所以遇到版本不同步问题,Kimera-VIO,Kimera-VIO-ROS,GTSAM的版本需要精心挑选。 Kimera-VIO在2021.07.01之后没有更新,git commit版本为641576f Kimera-VIO-ROS在2021.07.26之后就没有更新,git commi
MIT Kimera-VIO-ROS 安装
前言 我安装Kimera-VIO-ROS的时间是2023.10.28。由于已经离Kimera发布过去两年,所以遇到版本不同步问题,Kimera-VIO,Kimera-VIO-ROS,GTSAM的版本需要精心挑选。 Kimera-VIO在2021.07.01之后没有更新,git commit版本为641576f Kimera-VIO-ROS在2021.07.26之后就没有更新,git commi
ZYNQ学习笔记(一):基于ZYNQ7020、AN108的DDS实验(VIO可控频率字)
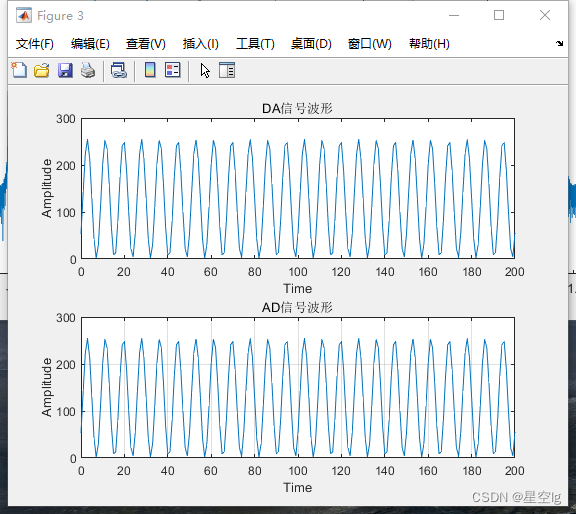
目录 一、设计需求、 二、DDS 基本原理、 三、Vivado工程建立、 四、添加设计源文件、模块例化、 3.1 添加设计源文件 3.2 模块例化 五、程序设计、 六、分析与综合、约束输入、 6.1 分析与综合过程 6.2 约束输入 七、连接测试、 八、数据导出与matlab分析、 九、实验改进、 9.1、模块例化 9.2、程序改进 9.3、约束输入 9.4、连接测试 总结、 实验

从零开始手写VIO课件逻辑
第一讲 概述与课程介绍 1-9页说的是课程的概要:第四页说了这门课主要讲什么 • IMU 的工作原理和噪声方程(第二讲) • 视觉与 IMU 紧耦合的基础理论(第三讲) • 从零开始实现 VIO 紧耦合优化器(仅基于 Eigen)(四讲之后)10-20页说的是VIO的概述:第十一至十四页说了什么是VIO,什么是IMU(组成、精度、使用场景等),和相机有什么不同,二者的优劣对比;第十五页说了这两个
【深蓝学院】手写VIO第8章--相机与IMU时间戳同步--笔记
0. 内容 1. 时间戳同步问题及意义 时间戳同步的原因:如果不同步,由于IMU频率高,可能由于时间戳不同步而导致在两帧camera之间的时间内用多了或者用少了IMU的数据,且时间不同步会导致我们首尾camera和IMU数据时间不同,会使估计存在误差,使我们的系统精度下降甚至出现错误的预测。如果以IMU时间为准确的,同步之后,我们可以用时间戳偏移对系统估计的 T w b T_{wb} Tw