本文主要是介绍VIO外参标定方法总结,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、前言
VIO外参标定是指相机和IMU之间的转移矩阵的确定,包括3×3的旋转矩阵和3维平移向量。整体上分为离线标定和在线标定两类方法,这篇文章做一个总结,主要是经典的方法,记录其思想。
二、博文链接
1、离线标定方法
最基本的当然就是人工手动标定了,但这样不仅费力,并且误差大不够准确,作为初始猜测还可以。
VIO最知名的离线标定工具就是Kalibr了。
GitHub - ethz-asl/kalibr: The Kalibr visual-inertial calibration toolboxThe Kalibr visual-inertial calibration toolbox. Contribute to ethz-asl/kalibr development by creating an account on GitHub.![]() https://github.com/ethz-asl/kalibrKalibr标定的基本原理
https://github.com/ethz-asl/kalibrKalibr标定的基本原理
https://www.cnblogs.com/mybrave/p/9675936.html![]() https://www.cnblogs.com/mybrave/p/9675936.html
https://www.cnblogs.com/mybrave/p/9675936.html
camera-imu内外参标定 - 知乎在vio系统中,camera-imu间内外参精确与否对整个定位精度起着重要的作用。所以良好的标定结果是定位系统的前提工作。 目前标定算法主要分为离线和在线标定,离线标定以kalibr为代表,能够标定camera内参、camera-i…![]() https://zhuanlan.zhihu.com/p/68863677Camera-IMU联合标定原理 | AI技术聚合Camera-IMU联合标定原理一.相机投影模型二.IMU 模型三.Camera-IMU标定模型(一) 相机-IMU旋转(二) 相机-IMU平移(三) 视觉惯性代价函数四. camera-imu联合标定(一) 粗略估计camera与imu之间时间延时(二) 获取imu-camera之间初始旋转,还有一些必要的初始值:重…
https://zhuanlan.zhihu.com/p/68863677Camera-IMU联合标定原理 | AI技术聚合Camera-IMU联合标定原理一.相机投影模型二.IMU 模型三.Camera-IMU标定模型(一) 相机-IMU旋转(二) 相机-IMU平移(三) 视觉惯性代价函数四. camera-imu联合标定(一) 粗略估计camera与imu之间时间延时(二) 获取imu-camera之间初始旋转,还有一些必要的初始值:重…![]() https://aitechtogether.com/python/142928.html手眼标定
https://aitechtogether.com/python/142928.html手眼标定
机器人视觉标定(二)手眼标定 - 知乎在(一)中已经介绍了线结构光标定,通过线结构光可以得到物体被照射激光部分的相机三维坐标。当机械手臂安装了线结构光传感器后,相当于被安装了眼睛,得到相机三维坐标相当于眼睛看到了物体的位置,这时就需要眼睛…![]() https://zhuanlan.zhihu.com/p/78855930
https://zhuanlan.zhihu.com/p/78855930
2、在线标定方法
VINS-mono外参标定原理
https://zhuanlan.zhihu.com/p/413096765![]() https://zhuanlan.zhihu.com/p/413096765解放双手|教你进行相机与IMU外参的在线标定 - 计算机视觉life的文章 - 知乎
https://zhuanlan.zhihu.com/p/413096765解放双手|教你进行相机与IMU外参的在线标定 - 计算机视觉life的文章 - 知乎
https://zhuanlan.zhihu.com/p/70760958![]() https://zhuanlan.zhihu.com/p/70760958
https://zhuanlan.zhihu.com/p/70760958
三、VIO在线外参标定典型方法详解
1、自动标定:
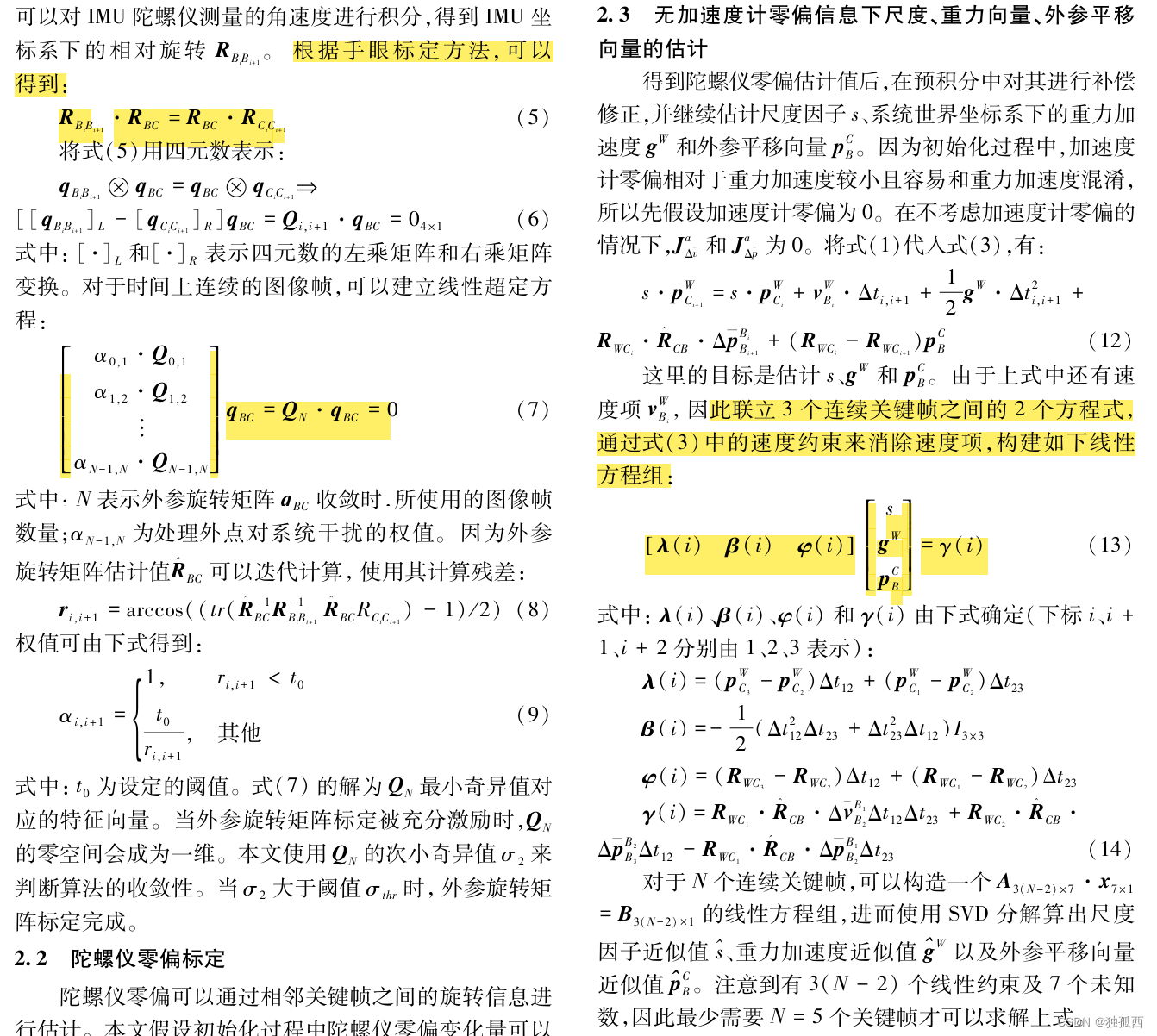
单目相机通过对极几何和随机采样一致性确定两帧图像之间的相对旋转,IMU可以得到自己坐标系下的前后两帧图像之间相对旋转,根据手眼标定方法,结合多帧数据,可以得到关于旋转的超定方程,利用优化方法则可以得到相机和IMU之间的旋转外参。
2、在线估计:
求外参残差关于位移和旋转的雅可比

四、VINS-mono的外参标定
VINS-mono上使用的外参自动标定与在线标定算法,来自Monocular_VisualInertial_State_Estimation_With_Online_Initialization_and_CameraIMU_Extrinsic_Calibration这篇论文。整体的流程方法如下:

手眼标定原理:
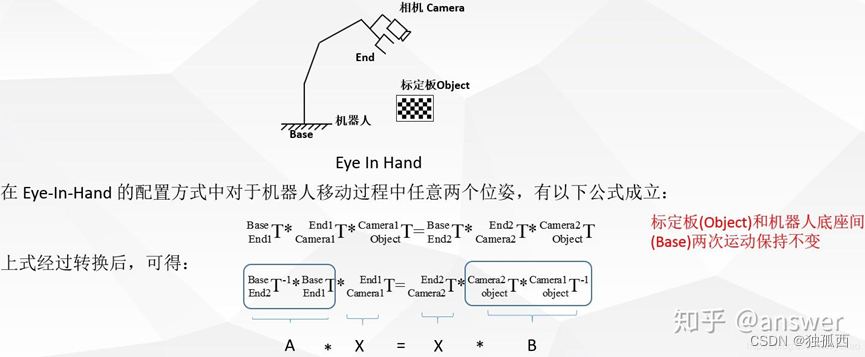
结合上图, 相邻Camera关键帧对应pose可以由两种方式(为后面构建方程铺垫):
a.八点法算法(solveRelativeR)
b.Imu预积分并与结合
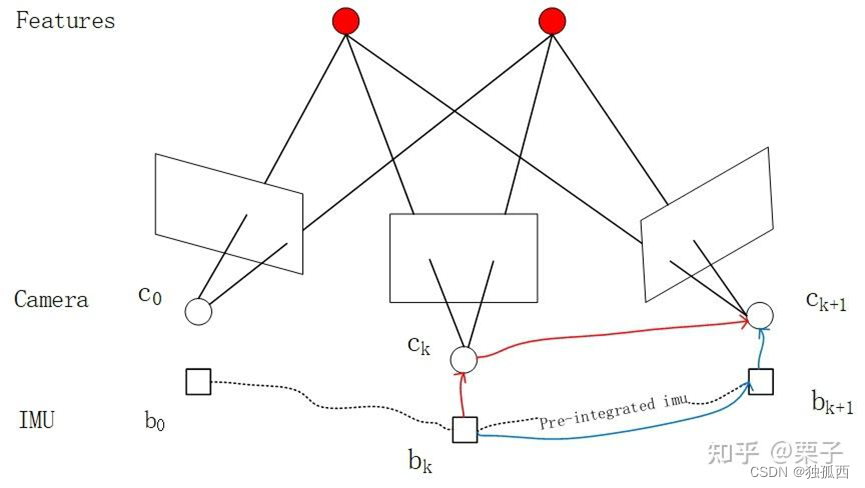
标定转换
红色线和蓝色线得到的变换值理论上应该相同,则可通过假设从Camera坐标系到Imu坐标系相对旋转量为即q和R ,进一步可构建方程并求解(vins-mono使用SVD求解方法)
根据手眼标定原理与上述原理,得到(4),转换成四元数格式,经过整理得到形如Ax=0的(7)式。

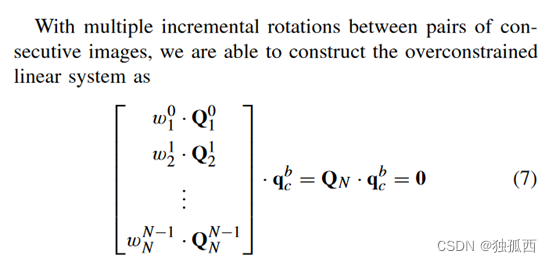
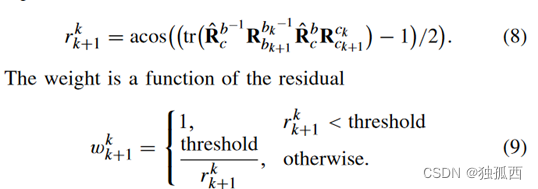
在求解过程中,因为上面在求解帧间的R、T变换时是用对极约束算法,该方法避免不了有错误的匹配等(outlier),因此对Ax=0中A矩阵加权计算从而增加在线标定结果鲁棒性,加权的计算方式(近似the Huber norm计算方式)参考作者引用的标定论文中的式8、9,如下
为什么奇异值大于0.25才认为标定成功?
代码中ric_cov(1) > 0.25,为倒数第二小的奇异值。最小的奇异值接近0(奇异值大于0,且通常前面几个大的奇异值总和能占所有奇异值总和的一大部分),这里给了个阈值,看其是否足够大,每个奇异值大小可以理解为分方向的力度大小。这边用0.25来限定倒数第二小的奇异值,是判断不为0的奇异解中,最终求解的奇异值是否是只有一个接近于0的,最优解只有一个,如果有多个接近0,都很小的话,那么该最小奇异解很可能不是最优,从而间接可以判断在标定过程中是否有充足的旋转等。
速度,姿态,特征深度和相机- IMU平移的线性初始化:一旦相机- IMU旋转固定,我们可以估计相机- IMU的平移,同时初始化速度,姿态和特征深度,以及IMU相对于初始参考帧的姿态。线性初始化通过最小化滑动窗口内IMU和单目相机所有测量误差的马氏范数之和进行最大似然估计。


值得注意的是,在这个线性初始化阶段,我们重用了用于相机- IMU旋转标定的传感器测量值,但
固定为常数。我们还直接使用陀螺仪测量值短期积分得到的增量和相对旋转。由于这种线性初始化通常只能在几秒内完成,直接使用IMU旋转不会造成明显的漂移。
进一步细化:
VINS-Mono在获得旋转变换之后,在进行VIO的过程中,将相机与IMU外参作为优化参数在整个算法运行过程中进行矫正,从而保证外参的准确性。
在状态初始化和获得相机- IMU标定后,进行了滑动窗口非线性估计器,以进行高精度的状态估计和标定优化。这是文献[ 7 ]和文献[ 8 ]的扩展,将相机- IMU标定纳入非线性优化中。由于非线性优化中的大量参数与线性初始化中的参数具有相同的物理意义,这里我们通过重用符号来表示状态向量( X )、雅克比矩阵( H、F、G)、协方差矩阵( P , Q)和信息矩阵( A ),从而引入了符号的轻微滥用。
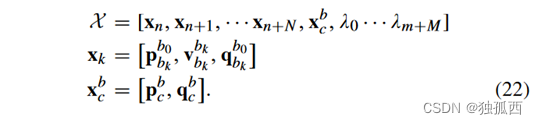
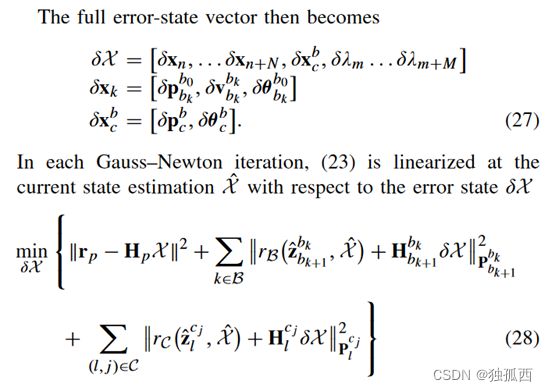
全状态的定义类似于线性情况,除了全6 - DOF相机- IMU变换包含在状态向量中。同样将重力矢量替换为四元数,对IMU平动和转动(转置再次被忽略)进行联合优化,我们最小化所有测量残差的马氏范数之和以获得最大后验估计。
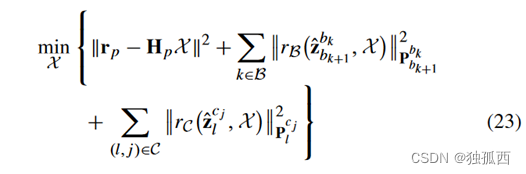
我们使用误差状态表示法[ 6 ]将非线性系统( 23 )线性化,并使用具有Huber范数的Gauss - Newton算法[ 30 ]求解,以实现鲁棒的异常值剔除。位置、速度和特征深度等线性分量的残差可以很容易地定义为最新状态估计的补充。
这篇关于VIO外参标定方法总结的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




