rep专题
域内攻击 ---> AS-REP Roasting
今天,我们就来讲一下另外一种Roasting攻击 AS-REP Roasting 1.AS-REP Roasting原理 其实和kerberoasting一样,这种攻击也是一种暴力破解的攻击,完全取决于攻击者的字典。 但是不同于Kerberoasting,他不需要用户进行注册SPN,他其实就是对AS-REP过程中返回的那张TGT中用了用户的NTLM哈希加密的CT_Sessionk
内网安全--AS-REP Roasting攻击
AS-REP Roasting是一种对用户账号进行离线爆破的攻击方式。但是该攻击方式利用比较局限,因为其需要用户账户设置“不要求Kerberos预身份验证”选项,而该选项是默认没有勾选上的。Kerberos预身份验证发送在Kerberos身份验证的第一阶段(AS_REQ&AS-REP),它的主要作用是防止密码离线爆破。默认情况下,预身份验证是开启的,KDC会记录密码错误次数,防止在线爆破。 当关闭
从云课五分钟到一分钟之v-rep_pro_edu_v3_6_2
脚本 git clone https://gitcode.net/ZhangRelay/v-rep_pro_edu_v3_6_2_ubuntu16_04.gittar -xf v-rep_pro_edu_v3_6_2_ubuntu16_04/V-REP_PRO_EDU_V3_6_2_Ubuntu16_04.tar.xzcd ~/V-REP_PRO_EDU_V3_6_2_Ubuntu16_04./

CoppeliaSim Edu(原V-rep)入门三实验指南
Dummy对象和IKGroup的使用 实验目的 熟悉Dummy对象和IKGroup的使用,并用他们对UR10机器人进行逆运动学求解; 观察使用不同求解器、不同迭代步数下的逆解效果。 实验原理 利用雅可比矩阵将关节空间速度映射到直角坐标空间的性质可构造向量值函数: p = f ( q ) p = f(q) p=f(q) 而逆运动学问题即是求解方程: f ( q ) = p

rep movsb 和 cld
先说说MOVSB(MOVe String Byte):即字符串传送指令,这条指令按字节传送数据。通过SI和DI这两个寄存器控制字符串的源地址和目标地址,比如DS:SI这段地址的N个字节复制到ES:DI指向的地址,复制后DS:SI的内容保持不变。而REP(REPeat)指令就是“重复”的意思,术语叫做“重复前缀指令”,因为既然是传递字符串,则不可能一个字(节)一个字(节)地传送,所以需要有一个
V-REP四驱跃动冲锋仿真
转自maitd https://blog.csdn.net/qq_33243369/article/details/91492341 这个车能跑,但存在着问题我没能解决,就是导轮的问题,导轮与车身之间的连接总是有问题.还待解决. 完整工程下载链接:https://download.csdn.net/download/qq_33243369/11237112

v-rep--websocket接口
websocket是什么 V-REP 中的 Web Socket 是一种用于在 V-REP 和外部应用程序之间进行通信的协议和技术。Web Socket 基于 TCP 连接,可以提供双向、实时的数据传输,适用于互动性或实时交互性应用。 (比如v-rep在云服务器上运行,通过websocket和用户所使用的web前端通信) 什么是云仿真 就是将v-rep的仿真程序发送到云服务器上,借助

重头戏!ZeroMQ的请求-响应模式详解:ZMQ_REP、ZMQ_REQ
一、ØMQ模式总览 ØMQ支持多种模式,具体可以参阅:https://blog.csdn.net/qq_41453285/article/details/106865539本文介绍ØMQ的“请求-响应”模式 二、请求-响应模式 请求-响应模式由http://rfc.zeromq.org/spec:28正式定义请求-应答模式应该是最常见的交互模式,如果连接之后,服务器终止,那么客户端也终止,从
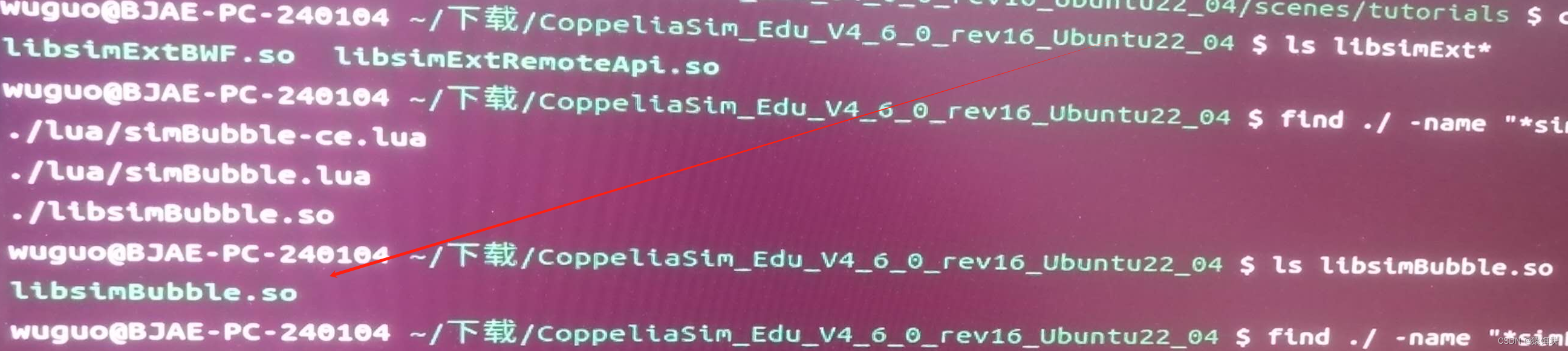
v-rep--API
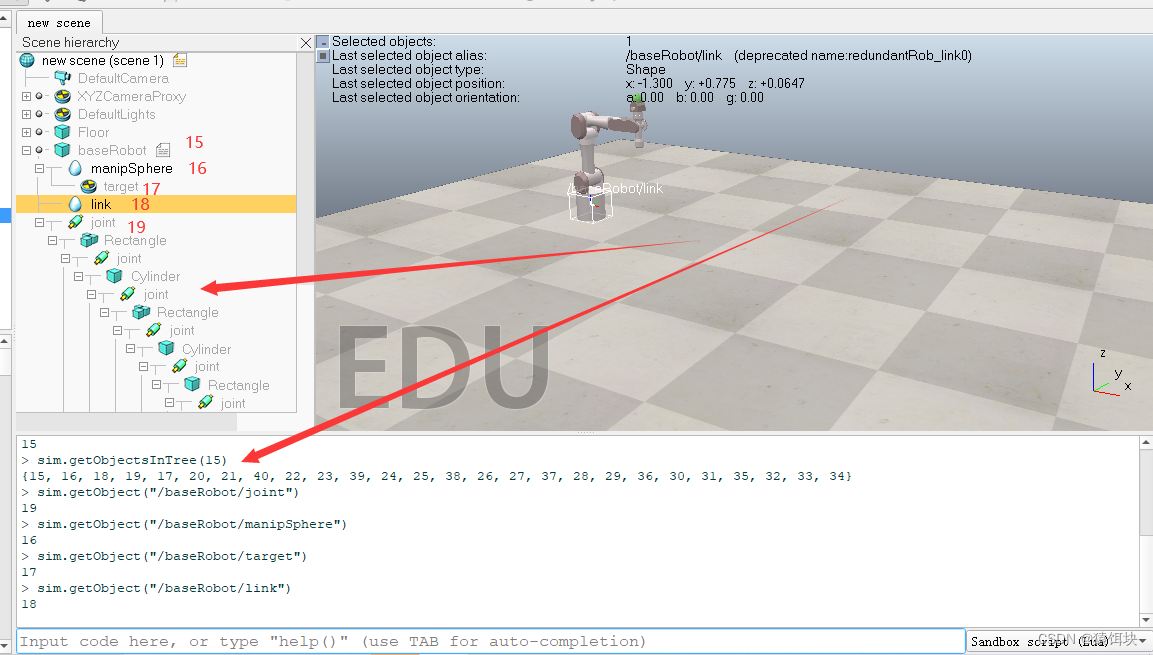
解析c++版本 API官网 各种对象类型 simGetObject(path,) path:对象的路径; simGetObjectsInTree(int treebaseHandle) int* simGetObjectsInTree(int treeBaseHandle, int objectType, int options, int* objectCount) treeBa
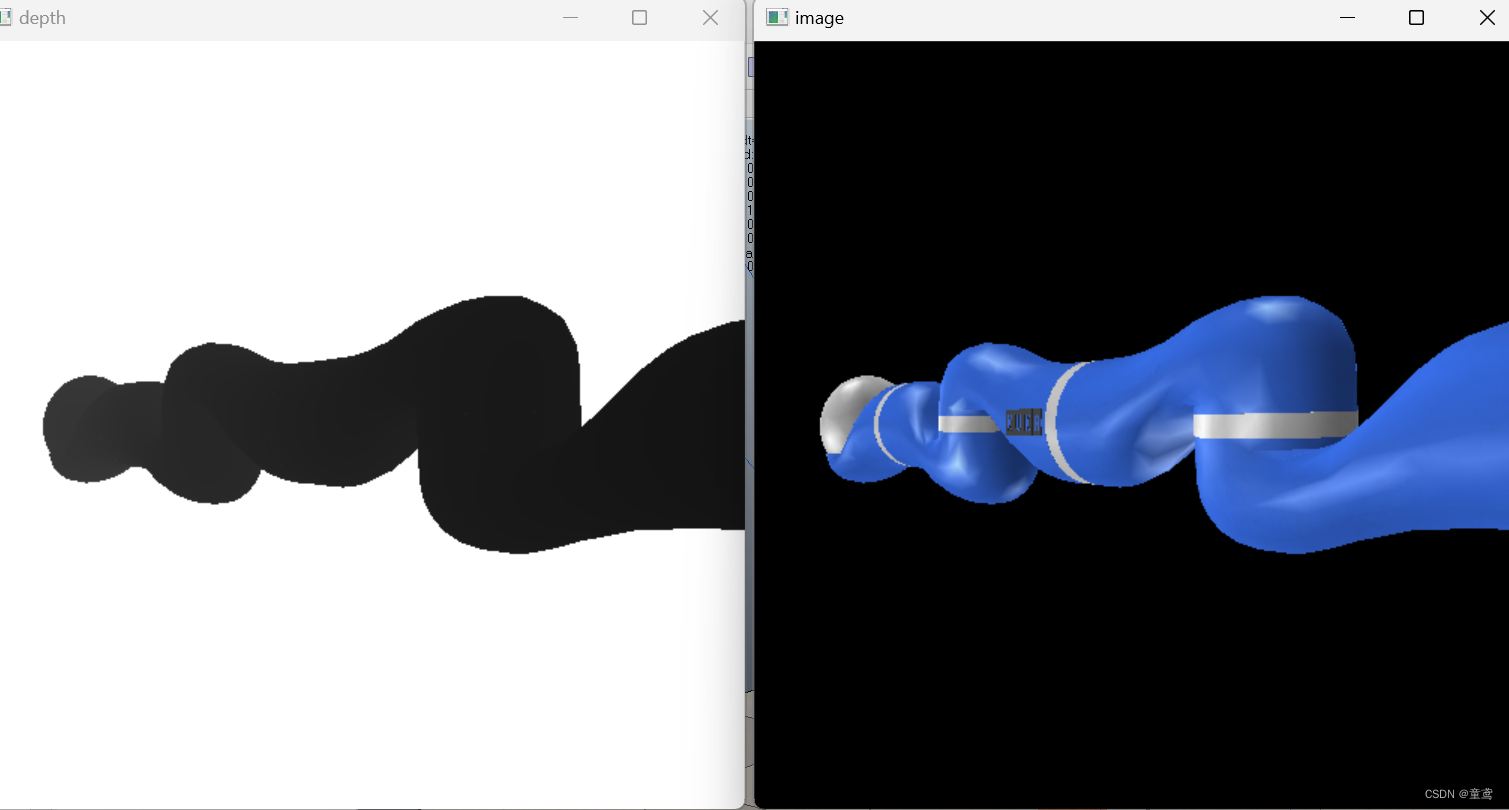
V-rep(CoppeliaSim)添加相机,与python联合仿真,并使用python读取V-rep中的RGB图与深度图
目录 前言在V-rep中构建场景建立python与V-rep通信 前言 本文主要介绍了如何使用python与V-rep联合仿真,并用OpenCV可视化V-rep中视觉传感器所能看到的 RGB图和深度图,效果图如下。 在V-rep中构建场景 本文使用的V-rep版本是3.5: 打开V-rep,并将任意一个目标(如机械臂)拖入到场景中。添加视觉传感器,在场景的空白处点击右键–

Qt5.7 编译V-REP
准备工作 1在官网下载教育版安装包及源码2参考官方编译指南进行编译 下载qscintilla下载Boost C库下载 Lua51 3软件安装与解压 编译存在的问题 准备工作 1 下载安装包及源码 2 下载各种库 3 安装软件,解压缩库 1、在官网下载教育版安装包及源码 2、参考官方编译指南进行编译 下载qscintilla 下载Boost

indigo 安装 V-REP和vrep_ros_bridge
首先,感谢Top Liu 和zhangrelay,本文是学习这两位老师文章之后,实践操作,写之,作为日后参考之用。在此,贴出两位老师的文章,供大家参考: ROS与Matlab系列2:连接vrep仿真器 机器人操作系统ROS(indigo)与三维仿真软件V-Rep(3.2.1)通信接口使用笔记 正文: vrep_ros_bridge提供了V-Rep和ROS之间的通信接口,可以实现使用
rep movsd ,N - move all of our dwords--【解决办法】
今天晚上,调程序的时候,出现这个问题,同时还弹出一个框显示: 未处理的异常 0xC0000005: 读取位置 0x00000000 时发生访问冲突 【解决办法】: 找到memcpy()的那一行,这里肯定是存在越界的问题,请按如下方式修改,记得最后的 +1 memcpy( dest, src, strlen(src) + 1 ); 千万记得 +1 . ------

机械臂8---动力学仿真软件V-REP(CoppeliaSim)
V-REP已于2019年年底正式更名为CoppeliaSim。CoppeliaSim基本延含V-REP的功能,支持ROS2。 V-REP全称为virtual robot experimentation platform,为机器人仿真平台。其使用范围广泛,可以在Windows、MacOS、Linux系统上运行,支持六种编程方法,嵌入式脚本、插件、附加组件、ROS节点、远程客户端应用编程接口、Blu

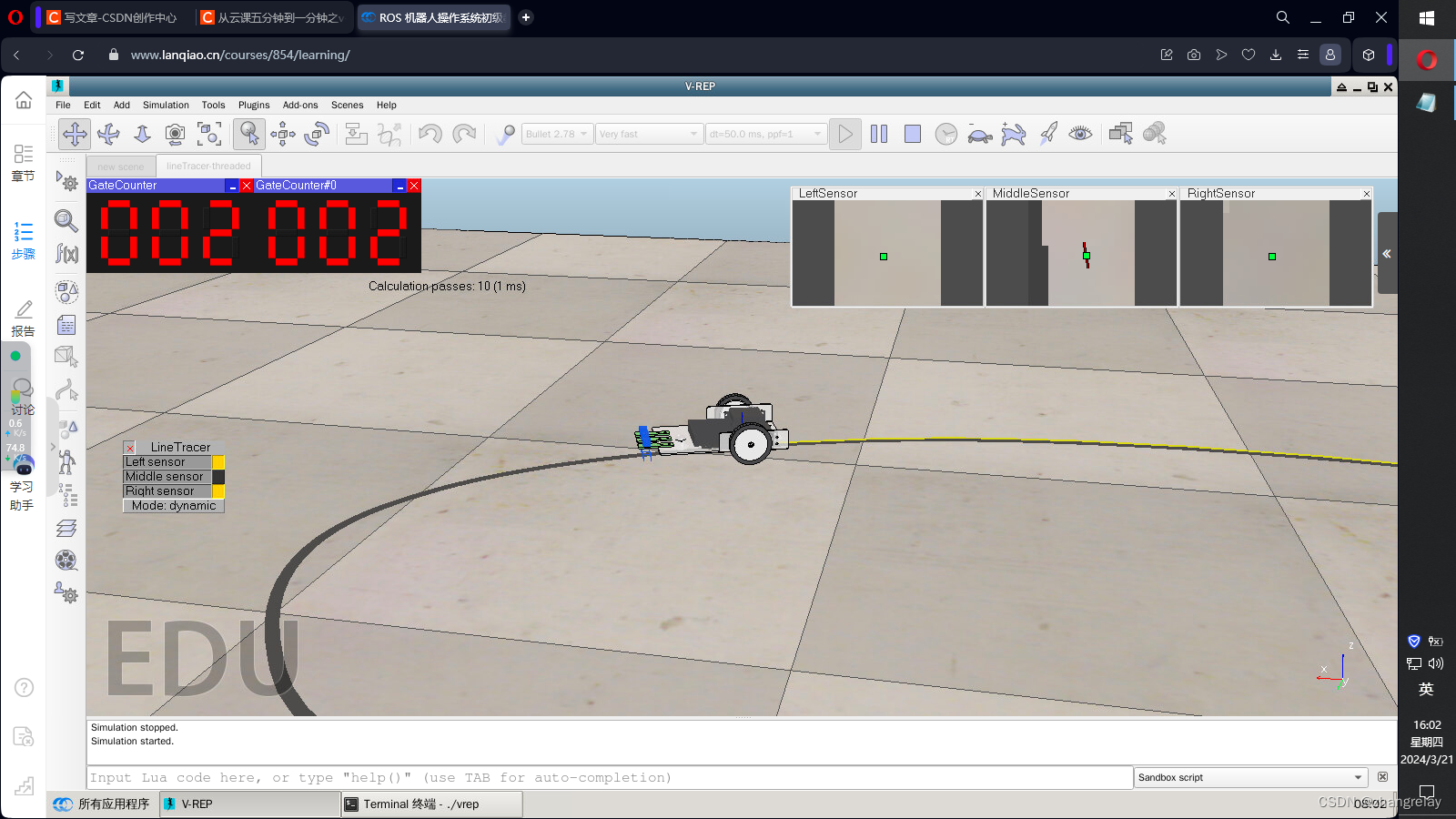
疫情让我使用V-rep仿真(结合pythonAPI)实现机器人视觉巡线+pid调速,
任务概要 1.背景介绍 1.1实现效果: 2.V-REP仿真介绍 3.实现 3.1选取机器人 3.2更改线形状操作 3.3视觉传感器 3.3.1视觉传感器选择 3.3.2视觉传感器介绍 3.4PythonAPI调用 3.4.1V-rep端通信配置 3.4.2Python的配置 3.4.3 函数库的导入
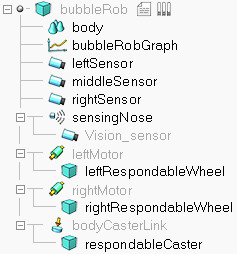
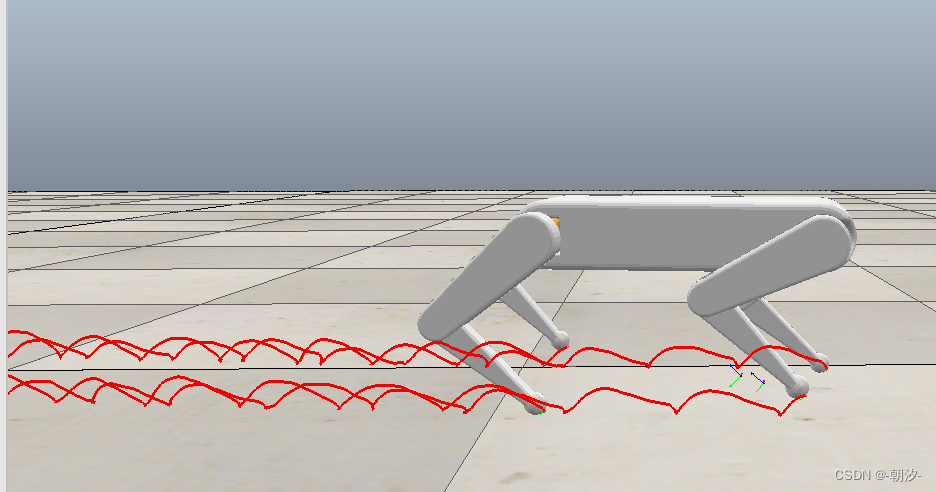
V-REP 线条追踪泡泡机器人教程
在本教程中, 我们旨在扩展 BubbleRob 的功能,使之沿着地上的一条线走。要保证您已经阅读并理解了第一个 BubbleRob 教程。本教程由 Eric Rohmer 提供。 在 tutorials/BubbleRob 中加载位于 V-REP 安装文件夹中的第一个 BubbleRob 教程的场景。与本教程相关的场景文件位于tutorials/LineFollowingBubbleRob 中。

oracle发票验证,发票验证请求报错MSG-00000,REP-1419,REP-0069,REP-57054
客户化的 发票验证请求,运行报错,日志如下: +---------------------------------------------------------------------------+ 应付帐款: Version : 12.0.0 Copyright (c) 1979, 1999, Oracle Corporation. All rights reserved. APPRVL
V-REP和Python的联合仿真
机器人仿真软件 各类免费的的机器人仿真软件优缺点汇总_robot 仿真 软件收费么_dyannacon的博客-CSDN博客 课程地址 https://class.guyuehome.com/p/t_pc/course_pc_detail/column/p_605af87be4b007b4183a42e7 课程资料 guyueclass: 古月学院课程代码 旋转变换 旋转的左乘与右乘 - 知乎
MySQL中readcommitted_数据库事务隔离级别:Read uncommitted 、Read committed 、Rep... - 简书...
1.数据库事务隔离级别 数据库事务的隔离级别有4个,由低到高依次为Read uncommitted 、Read committed 、Repeatable read 、Serializable ,后面三个级别可以逐个解决脏读 不可重复读 、幻读 这几类问题。 2.总结 1> 脏读:当事务隔离级别为read uncommitted,则可以读到其他事务未提交的数据,这是所有隔离级别中最低的一种。此时
![[软件下载]解决copperliasim(原v-rep)的教育版无法下载的问题](https://img-blog.csdnimg.cn/6b3db68d635a4c6ea9a54685d6c4bb39.png)
[软件下载]解决copperliasim(原v-rep)的教育版无法下载的问题
前言 v-rep(现在叫做copperliasim,但是v-rep字数比较少,并且叫的人也比较多,故下文皆称vrep)是一款优秀的机器人仿真软件,在国内似乎用的人不多,但是国外据说还是比较流行的。 目前或许有不少的朋友在下载时无法下载教育版结果只能选择免费版而不能获得完整的功能。今天我来解决为何会有教育版选项却不能下载。 试验 注意看当我鼠标移动到对应位置时左下角的待跳转页面。注意我的鼠标隐
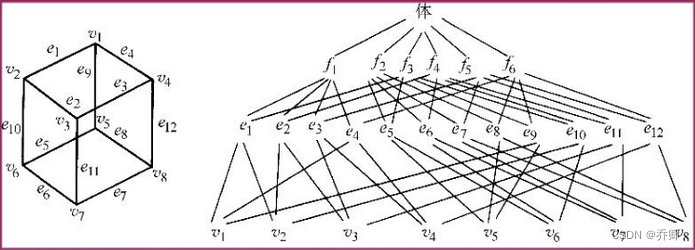
计算机图形学(九):三维对象的表示(三维几何模型的CSG树和B-rep表示)
目录 构造表示法 体素构造CSG的原理和方法 空间形体的正则集合运算 建立实体模型的一般过程 空间形体的CSG树表示 边界表示法 计算机中表示三维形体的模型,按照几何特点进行分类,大体上可以分为三种:线框模型、表面模型和实体模型。如果按照表示物体的方法进行分类,实体模型基本上可以分为分解表示、构造表示CSG(Constructive Solid Geometry)和边界表示B
Stem Cell Rep:科学家识别出对HIV耐受的免疫细胞的可持续来源
近日,一篇发表在国际杂志Stem Cell Reports上题为“Generation of SIV-resistant T cells and macrophages from nonhuman primate induced pluripotent stem cells with edited CCR5 locus”的研究报告中,来自威斯康星大学麦迪逊分校等机构的科学家们通过研究利用这种对HI

V-REP 建立简洁模型教程
本教程将指导你逐步建立一个简洁的机器人或其他项目的仿真模型。想要得到一个美观,显示速度和模拟速度快并且稳定的仿真模型,这是一个非常重要的专题,可能也是最重要的一个方面。 为了说明建模过程,要创建下图中的机械臂: 构建可见形状 当建立新的模型时,首先,我们只用处理它的视觉方面:动态方面(其潜在的简化/优化模型)、关节、传感器等,这些将在后面阶段处理。 我们现在可以点击 [Menu bar