pointnet专题
PointNet++改进策略 :模块改进 | PAConv,位置自适应卷积提升精度
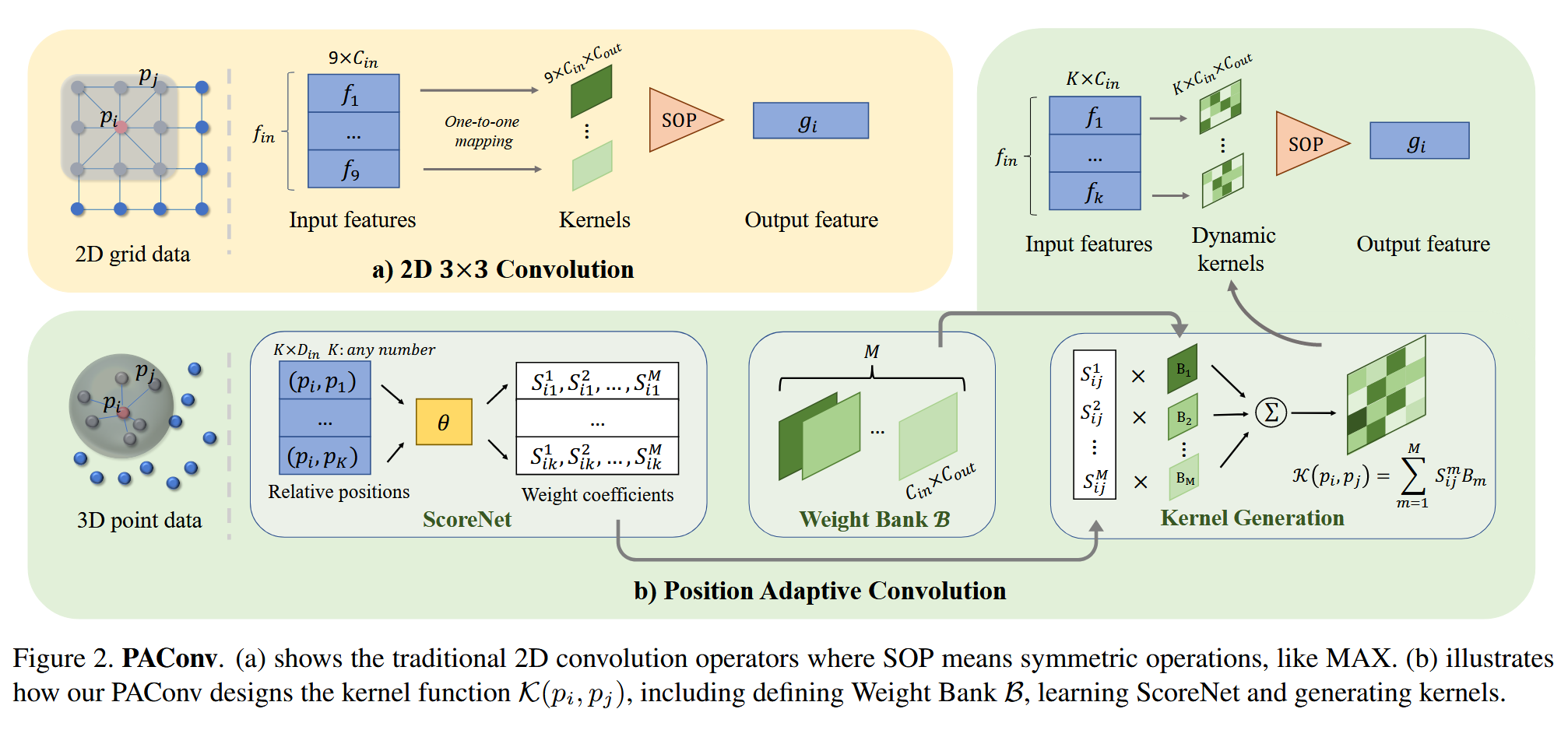
题目:PAConv: Position Adaptive Convolution with Dynamic Kernel Assembling on Point Clouds来源:CVPR2021机构:香港大学论文:https://arxiv.org/abs/2103.14635代码:https://github.com/CVMI-Lab/PAConv 前言 PAConv,全称为位置自适应卷积

Pointnet++改进即插即用系列:全网首发ACConv2d|即插即用,提升特征提取模块性能
简介:1.该教程提供大量的首发改进的方式,降低上手难度,多种结构改进,助力寻找创新点!2.本篇文章对Pointnet++特征提取模块进行改进,加入ACConv2d,提升性能。3.专栏持续更新,紧随最新的研究内容。 目录 1.理论介绍 2.修改步骤 2.1 步骤一 2.2 步骤二 2.3 步骤三 1.理论介绍 由于在给定的应用环境中
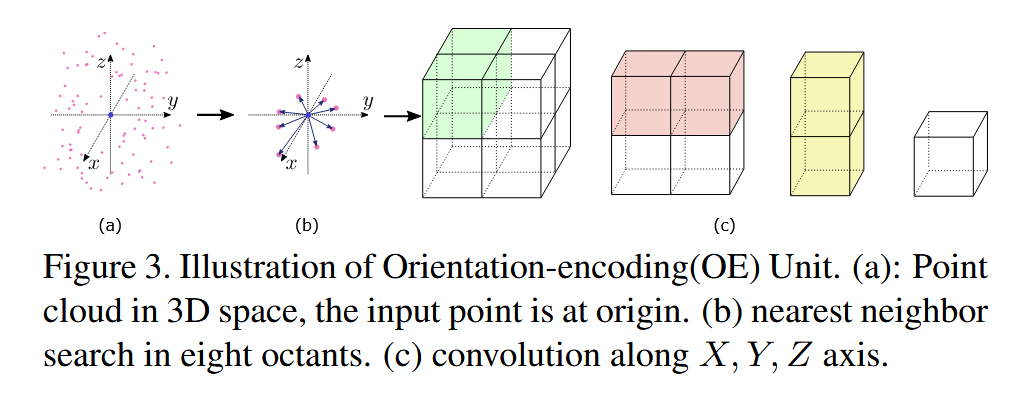
PointNet++改进策略 :模块改进 | OE Unit | PointSIFT,结合方向信息提升模型精度
论文:PointSIFT: A SIFT-like Network Module for 3D Point Cloud Semantic Segmentation来源:ECCV 2020机构:清华大学 & 上海交通大学论文:http://arxiv.org/abs/1807.00652代码: https://github.com/MVIG-SJTU/pointSIFT/https://gith

从点到面:解密PointNet++如何让点云处理更智能
哈喽,大家好,我是Sunny。 在点云处理领域,PointNet++是一篇非常有影响力的论文,它提出了一种新的方法来处理3D点云数据。相比于它的前作PointNet,PointNet++在捕捉局部结构和上下文信息方面做出了重要改进。本文将详细介绍PointNet++的主要思想,重点解释其网络结构。 背景:点云数据与挑战 点云是3D空间中数据的集合,其中每个点都包含空间坐标和可能的附加特征(如
基于PointNet / PointNet++深度学习模型的激光点云语义分割
一、场景要素语义分割部分的文献阅读笔记 1.1 PointNet PointNet网络模型开创性地实现了直接将点云数据作为输入的高效深度学习方法(端到端学习)。最大池化层、全局信息聚合结构以及联合对齐结构是该网络模型的三大关键模块,最大池化层解决了点云的无序性问题,全局信息聚合结构实现了点云不同层次特征信息和全局信息的融合,联合对齐结构保证了点云几何变换的语义不变性与特征空间的

PointNet论文导读
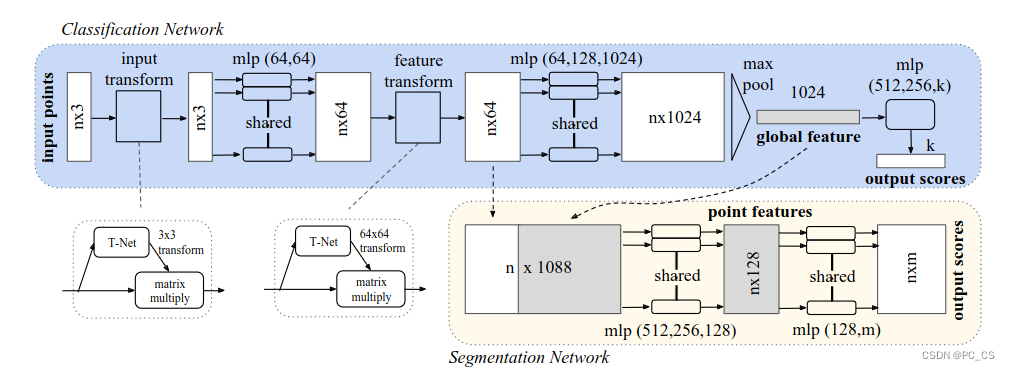
PointNet论文导读 关键点:网络结构输入数据特点:网络关键模块: 关键点: 1.设计一个新颖的网络来处理无序的点云数据; 2.pointnet网络可以被训练用来处理分类、部件分割和场景分割多种任务; 3.提供了数据实验和理论分析来验证方法的可行性和有效性; 4.展示了由网络中选定的神经元计算的3D特征,并对其性能进行了直观的解释。 网络结构 分类网络以n个点作

Pointnet++改进卷积系列:全网首发SMPConv连续卷积 |即插即用,提升特征提取模块性能
简介:1.该教程提供大量的首发改进的方式,降低上手难度,多种结构改进,助力寻找创新点!2.本篇文章对Pointnet++特征提取模块进行改进,加入SMPConv,提升性能。3.专栏持续更新,紧随最新的研究内容。 目录 1.理论介绍 2.修改步骤 2.1 步骤一 2.2 步骤二 2.3 步骤

Pointnet学习以及对代码的实现
由于点云不是常规数据格式,通常将此类数据转换为规则的 3D 体素网格或图像集合,然后再用神经网络进行处理。数据表示转换使生成的数据过于庞大。 PointNet是第一个直接处理原始点云的方法。只有全连接层和最大池化层,PointNet网络在推理速度上具有强大的领先优势,并且可以很容易地在CPU上并行化。 应对点云的无序性有三种方案: 方案1:排序 高维空间的排序,不可稳定。 方案2:假

Pointnet++改进即插即用系列:全网首发UIB轻量化模块
简介:1.该教程提供大量的首发改进的方式,降低上手难度,多种结构改进,助力寻找创新点!2.本篇文章对Pointnet++特征提取模块进行改进,加入UIB,提升性能。3.专栏持续更新,紧随最新的研究内容。 目录 1.理论介绍 2.修改步骤 2.1 步骤一 2.2 步骤二 2.3 步骤三

政安晨:【Keras机器学习示例演绎】(九)—— 利用 PointNet 进行点云分类
目录 点云分类 建立模型 训练模型 可视化预测 政安晨的个人主页:政安晨 欢迎 👍点赞✍评论⭐收藏 收录专栏: TensorFlow与Keras机器学习实战 希望政安晨的博客能够对您有所裨益,如有不足之处,欢迎在评论区提出指正! 本文目标:用于 ModelNet10 分类的 PointNet 实现。 点云分类 简介 无序三维点集(即点云)的分类、检测和分割是计算

3D抓取算法中的PointNet++网络介绍
3D抓取算法是一个在机器人抓取任务中广泛使用的算法基线,它结合了深度学习和计算机视觉技术来预测给定三维点云场景中物体的抓取姿态。在这个基线算法中,PointNet++ 网络是一个关键组件,用于从点云数据中提取有效的特征表示。 下面是关于 3D抓取算法 中 PointNet++ 网络的详细介绍: 1. 点云数据输入 在机器人抓取任务中,三维场景通常通过深度相机或激光雷达等传感器获取,并表示为点
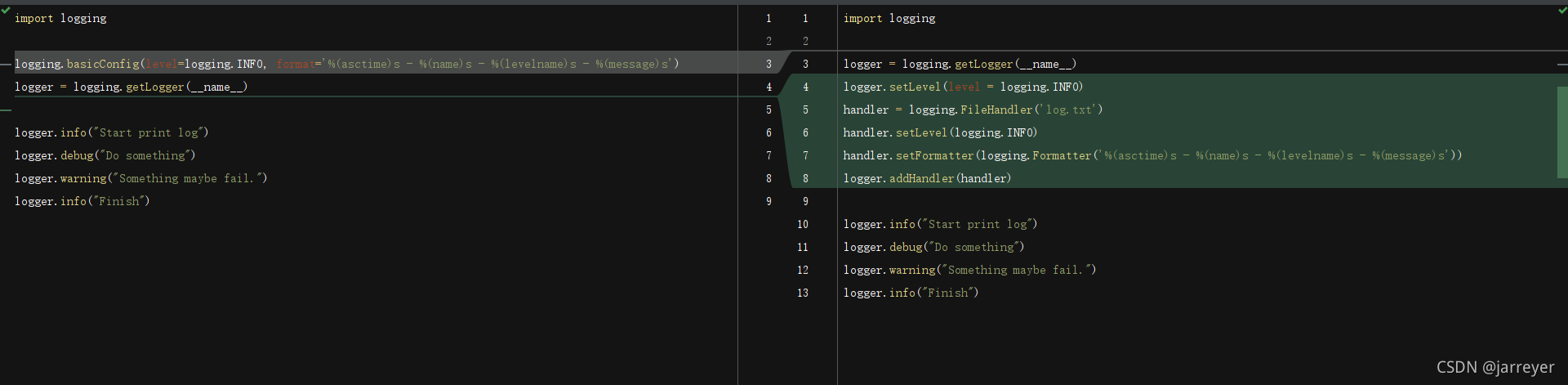
pointnet的logging模块理解
pointnet的logging模块 一、logging模块操作二、Pointnet中logging模块的操作 一、logging模块操作 1、日志内容导入logger import logginglogging.basicConfig(level=logging.INFO, format='%(asctime)s - %(name)s - %(levelname)s - %(
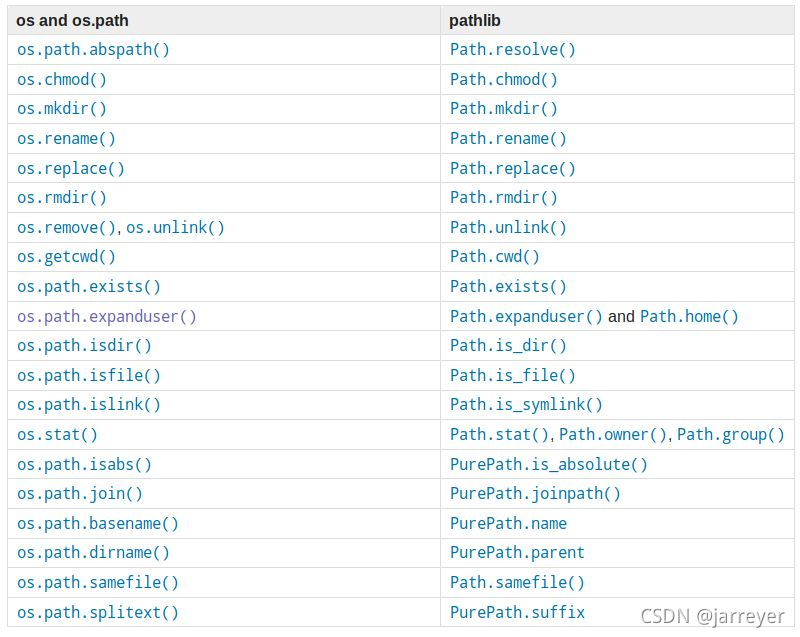
Pointnet中Path、os模块的理解
pointnet的Path、os模块 一、os模块操作二、Path模块操作三、Path和os常用命令对比 一、os模块操作 1、os调用操作系统下的目录 BASE_DIR = os.path.dirname(os.path.dirname(__file__)) #运行模块文件的目录ROOT_DIR = BASE_DIR sys.path.append(os.path.joi
对于pointnet配置相关bug的解决
Pointnet参考链接 Pointnet和Pointnet++的pytorch版源码链接参考 https://github.com/yanx27/Pointnet_Pointnet2_pytorch visualizer文件部分问题解决 1、win10系统下build.sh文件运行问题 安装git–>安装g++ 安装git:https://so.csdn.net/so/search?q=
Pointnet++改进即插即用系列:全网首发OREPA在线重新参数化卷积,替代普通卷积 |即插即用,提升特征提取模块性能
简介:1.该教程提供大量的首发改进的方式,降低上手难度,多种结构改进,助力寻找创新点!2.本篇文章对Pointnet++特征提取模块进行改进,加入OREPA,提升性能。3.专栏持续更新,紧随最新的研究内容。 目录 1.理论介绍 2.修改步骤 2.1 步骤一 2.2 步骤二 2.3 步骤三
PointNet++论文复现(三)【抽象层定义、分类模型 代码详解】
目录 抽象层 特征提取 整体代码 分类模型 以 pointnet2_cls_msg.py 为例 整体代码 抽象层 位于 pointnet2_utils.py 定义 特征提取 整体代码 # 特征提取 对应PointNet++ 中的 set abstraction (集合抽象化) # 首先, 通过 sample_and_group 操作形成局部 grou
PointNet++论文复现(一)【PontNet网络模型代码详解 - 分类部分】
PontNet网络模型代码详解 - 分类部分 专栏持续更新中!关注博主查看后续部分! 分类模型的训练: ## e.g., pointnet2_ssg without normal features python train_classification.py --model pointnet2_cls_ssg --log_dir pointnet2_cls_ssg python te
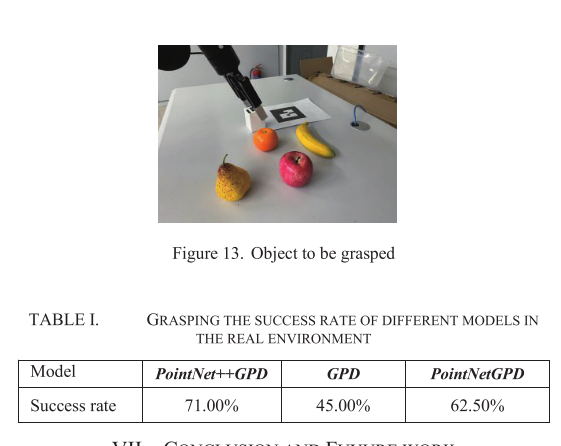
PointNet++GPD<论文>
1.介绍 尽管在单个已知物体和结构化环境中的抓取技术研究取得了重大进展和应用,传统的机器人抓取技术在复杂环境中无法很好地解决这一挑战,这些复杂环境往往是多个未知物体,杂乱不堪,并且包含真实环境中的光线和物体遮挡,但凭借深度学习强大的知识迁移和非线性拟合能力,它为解决这一问题提供了可能性。 除了用于抓取特定物体的人类设定轨迹外,传统的机器人抓取技术还需要对非结构化环境进行姿态估计来规划物体的抓取
Pointnet++改进即插即用系列:全网首发DBB多元分支块 |即插即用,提升特征提取模块性能
简介:1.该教程提供大量的首发改进的方式,降低上手难度,多种结构改进,助力寻找创新点!2.本篇文章对Pointnet++特征提取模块进行改进,加入DBB多元分支块,提升性能。3.专栏持续更新,紧随最新的研究内容。 目录 1.理论介绍 2.修改步骤 2.1 步骤一 2.2 步骤二 2.3 步骤三
PointNet代码学习(pytorch版本)
源码地址 pointnet.pytorch 感谢大神! 代码结构 (pytorch) s@s:~/pointnet.pytorch$ tree -d.├── misc├── pointnet│ └── __pycache__├── scripts├── shapenetcore_partanno_segmentation_benchmark_v0│ ├── 026911

PointNet代码阅读笔记
第一步:了解数据集和数据预处理 ModelNet数据集 改数据集是由论文[3D ShapeNets: A Deep Representation for Volumetric Shapes]提出的,按照模具的类别分: 1. ModelNet[10] 包含10个类别- 每一种类别中模具的个数不等模具的方向已经对齐 2. ModelNet[40] 包含40个类别分为对齐之后的和未对齐的。
Pointnet++改进优化器系列:全网首发Sophia优化器 |即插即用,实现有效涨点
简介:1.该教程提供大量的首发改进的方式,降低上手难度,多种结构改进,助力寻找创新点!2.本篇文章对Pointnet++特征提取模块进行改进,加入Sophia优化器,提升性能。3.专栏持续更新,紧随最新的研究内容。 目录 1.理论介绍 2.修改步骤 2.1 步骤一 2.2 步骤二 2.3
Pointnet++改进优化器系列:全网首发AdamW优化器 |即插即用,实现有效涨点
简介:1.该教程提供大量的首发改进的方式,降低上手难度,多种结构改进,助力寻找创新点!2.本篇文章对Pointnet++特征提取模块进行改进,加入AdamW优化器,提升性能。3.专栏持续更新,紧随最新的研究内容。 目录 1.理论介绍 2.修改步骤 2.1 步骤一 2.2 步骤二 2.3 步

点云学习笔记一(PointNet与PointNet++)
00. 写在前面 该篇文章主要介绍PointNet与PointNet++的原理与代码实现过程。 01. PointNet与PointNet++原理 1.1 PointNet PointNet可以直接对点云数据进行处理,首先由Charles R.Q提出。该方法主要针对点云数据的三个固有属性: 无序性:即输入点的顺序变换不会影响模型的预测结果; 点的相互作用:点云中的每个点并不是孤立存在的,相邻的点
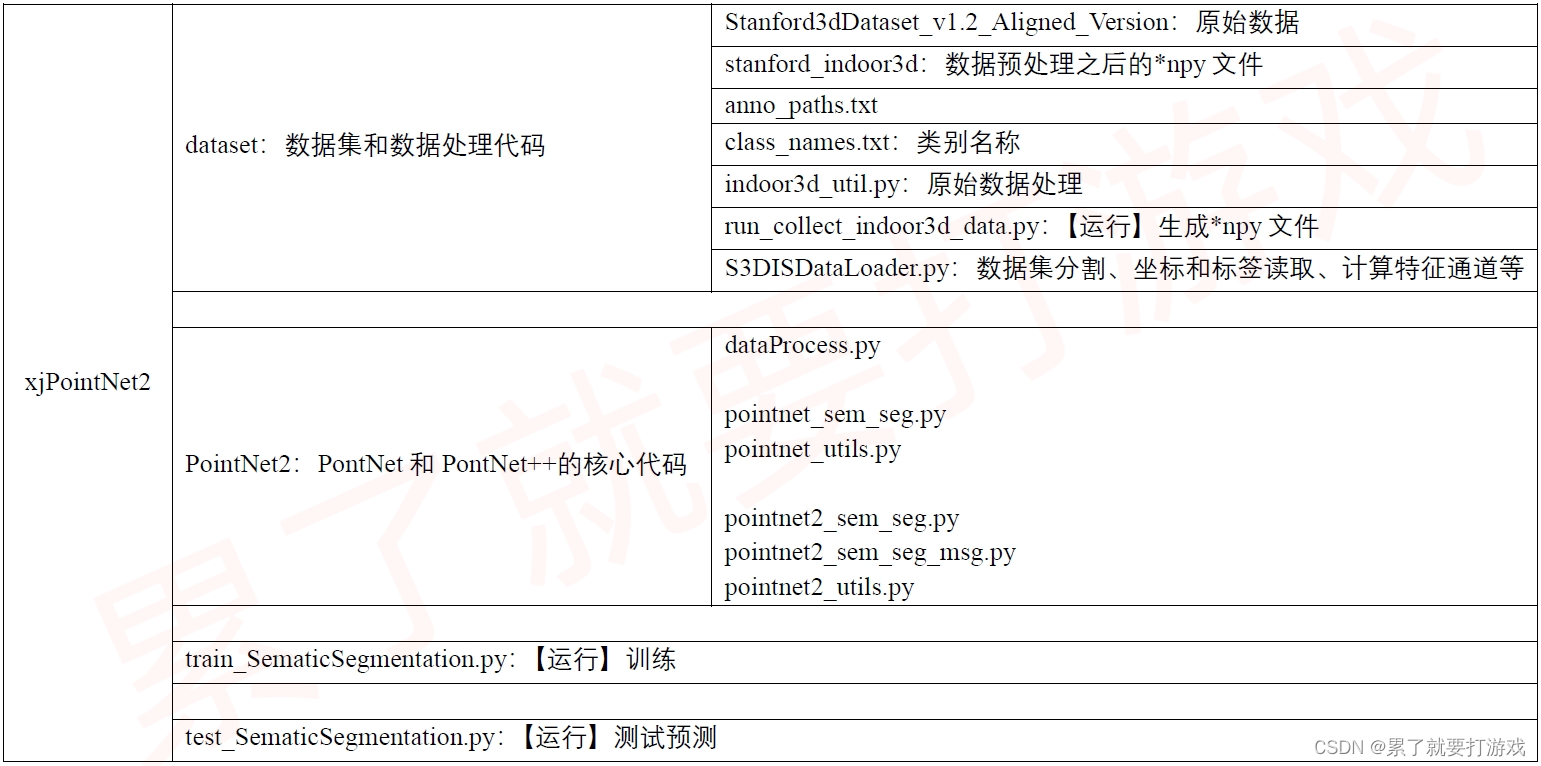
复现PointNet++(语义分割网络):Windows + PyTorch + S3DIS语义分割 + 代码
一、平台 Windows 10 GPU RTX 3090 + CUDA 11.1 + cudnn 8.9.6 Python 3.9 Torch 1.9.1 + cu111 所用的原始代码:https://github.com/yanx27/Pointnet_Pointnet2_pytorch 二、数据 Stanford3dDataset_v1.2_Aligned_Version 三