本文主要是介绍PointNet++改进策略 :模块改进 | PAConv,位置自适应卷积提升精度,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
- 题目:PAConv: Position Adaptive Convolution with Dynamic Kernel Assembling on Point Clouds
- 来源:CVPR2021
- 机构:香港大学
- 论文:https://arxiv.org/abs/2103.14635
- 代码:https://github.com/CVMI-Lab/PAConv
前言
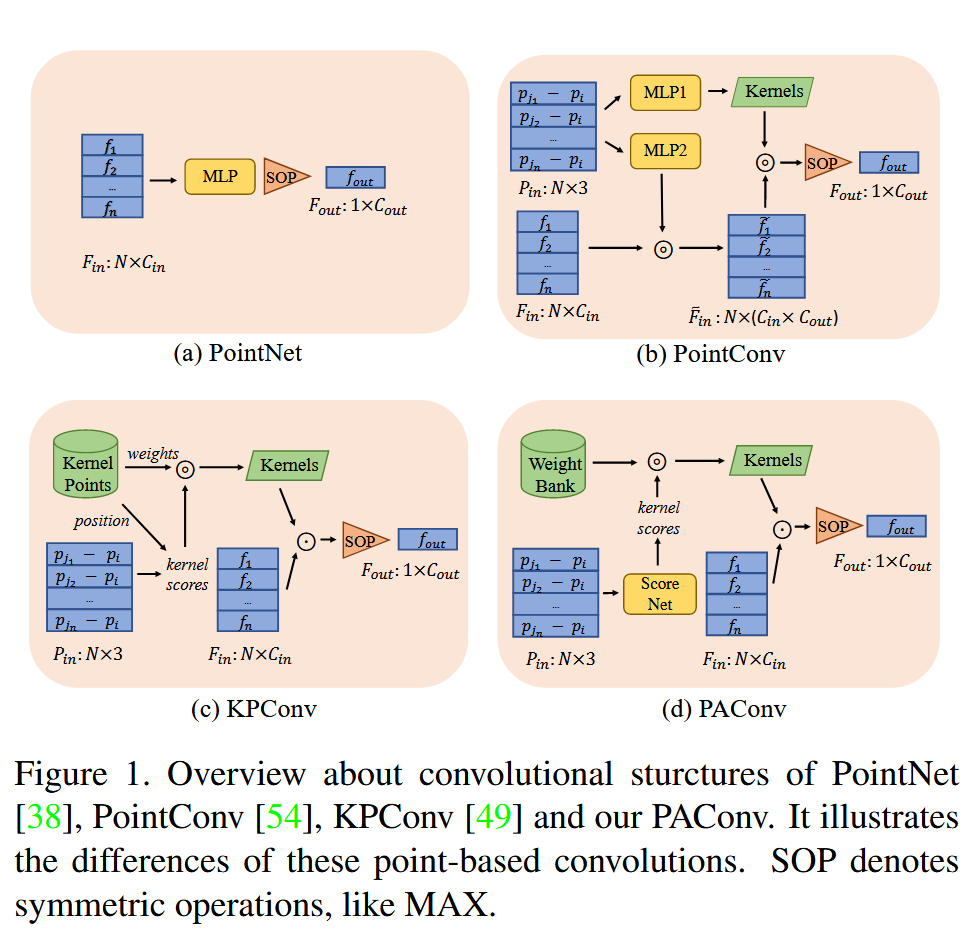
PAConv,全称为位置自适应卷积(Position Adaptive Convolution),是一种用于处理3D点云数据的通用卷积操作。不同于传统的2D卷积,PAConv通过根据点在三维空间中的位置动态组合卷积核。它的实现依赖于一个称为权重库(Weight Bank)的结构,该结构存储了基本的权重矩阵。这些矩阵通过一个称为ScoreNet的网络动态组合,ScoreNet根据点的位置关系学习如何自适应地组装这些卷积核。
PAConv的关键特点包括:
- 动态卷积核组装:卷积核不是固定的,而是通过根据学习到的与位置相关的系数动态组合权重矩阵生成的。
- 灵活性:相比于传统的2D卷积,PAConv更加灵活,特别适用于处理3D点云的不规则和无序特性。
- 降低复杂度:PAConv通过组合预定义的矩阵来生成卷积核,而不是直接从点的位置预测卷积核,这降低了计算复杂度。
- 与MLP网络集成:PAConv可以无缝集成到经典的点云处理框架(如PointNet或DGCNN)中,而无需改变其网络架构,同时还能显著提高在3D物体分类和分割任务中的表现。
方法实现
PAConv(位置自适应卷积)的实现基于以下几个核心部分:动态卷积核组装、权重库(Weight Bank) 和 ScoreNet。其主要实现步骤如下:
PAConv 的实现通过 ScoreNet 根据点之间的位置信息动态组合权重库中的权重矩阵,生成适应点云不规则性的卷积核。这一过程不仅有效处理了 3D 点云的复杂空间结构,同时通过减少直接预测卷积核的计算负担,实现了较高的效率和性能提升。
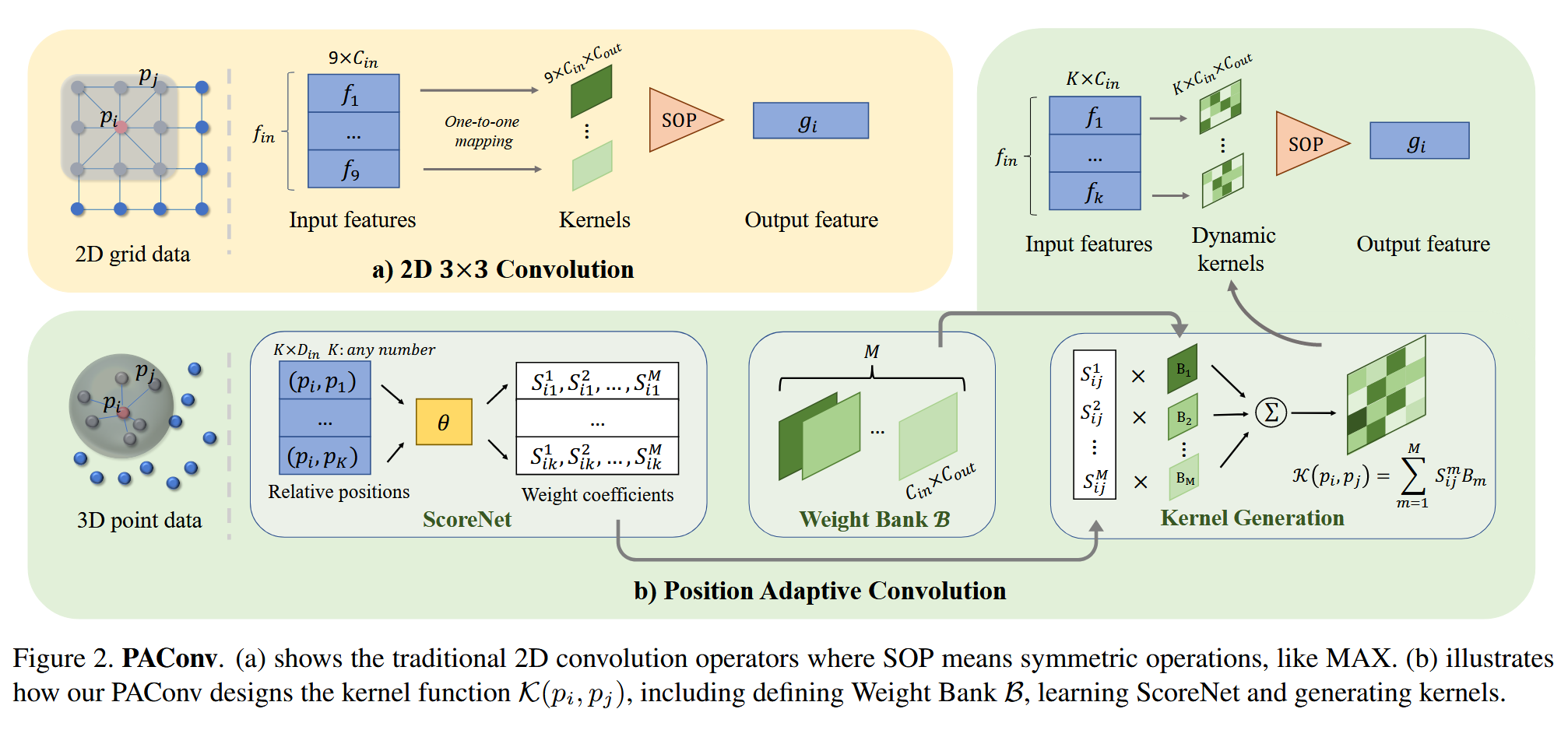
1. 权重库(Weight Bank)
PAConv 的第一个核心部分是权重库,它存储了多个基础的权重矩阵,记作 B = { B 1 , B 2 , … , B M } B = \{ B_1, B_2, \dots, B_M \} B={B1,B2,…,BM},其中每个矩阵 B m B_m Bm 的维度为 C i n × C o u t C_{in} \times C_{out} Cin×Cout。这些矩阵不会直接用于卷积,而是通过后续的动态组合过程生成卷积核。
2. ScoreNet
ScoreNet 是一个多层感知器 (MLP),用于学习点之间的位置信息,生成用于组合权重矩阵的系数。
ScoreNet 的输入是中心点 p i p_i pi 和邻居点 p j p_j pj 的位置信息 ( p i , p j ) (p_i, p_j) (pi,pj),输出是一个归一化后的得分向量 S i j S_{ij} Sij,用于控制不同权重矩阵的组合。ScoreNet 的输出计算如下:
S i j = α ( θ ( p i , p j ) ) S_{ij} = \alpha(\theta(p_i, p_j)) Sij=α(θ(pi,pj))
其中:
- θ ( p i , p j ) \theta(p_i, p_j) θ(pi,pj) 是通过 MLP 计算的非线性函数,提取点 p i p_i pi 和 p j p_j pj 之间的位置信息。
- α \alpha α 是 Softmax 归一化函数,确保得分在 ( 0 , 1 ) (0, 1) (0,1) 之间。
输出的得分向量 S i j = { S i j 1 , S i j 2 , … , S i j M } S_{ij} = \{ S_{ij}^1, S_{ij}^2, \dots, S_{ij}^M \} Sij={Sij1,Sij2,…,SijM},每个 S i j m S_{ij}^m Sijm 对应权重矩阵 B m B_m Bm 的组合系数。
3. 动态卷积核的生成
使用 ScoreNet 输出的得分向量 S i j S_{ij} Sij,动态组合权重库中的权重矩阵,生成最终的卷积核 K ( p i , p j ) K(p_i, p_j) K(pi,pj):
K ( p i , p j ) = ∑ m = 1 M S i j m B m K(p_i, p_j) = \sum_{m=1}^{M} S_{ij}^m B^m K(pi,pj)=∑m=1MSijmBm
其中:
- K ( p i , p j ) K(p_i, p_j) K(pi,pj) 是点 p i p_i pi 和 p j p_j pj 之间的卷积核。
- S i j m S_{ij}^m Sijm 是 ScoreNet 生成的组合系数,代表权重矩阵 B m B_m Bm 在生成卷积核时的权重。
- B m B^m Bm 是权重库中的第 m m m 个权重矩阵。
4. 卷积操作
生成的卷积核 K ( p i , p j ) K(p_i, p_j) K(pi,pj) 用于与输入特征 F F F 进行卷积操作。对于给定点云的输入特征 F = { f 1 , f 2 , … , f N } F = \{ f_1, f_2, \dots, f_N \} F={f1,f2,…,fN},输出特征 G = { g 1 , g 2 , … , g N } G = \{ g_1, g_2, \dots, g_N \} G={g1,g2,…,gN} 通过以下公式计算:
g i = Λ ( { K ( p i , p j ) f j ∣ p j ∈ N i } ) g_i = \Lambda\left(\left\{ K(p_i, p_j) f_j \mid p_j \in N_i \right\}\right) gi=Λ({K(pi,pj)fj∣pj∈Ni})
其中:
- N i N_i Ni 是中心点 p i p_i pi 的邻居点集。
- Λ \Lambda Λ 是用于聚合邻居点信息的操作(如 MAX、SUM 或 AVG)。
- f j f_j fj 是邻居点 p j p_j pj 的输入特征。
- g i g_i gi 是点 p i p_i pi 的输出特征。
5. 权重正则化
为了避免权重矩阵过于相似,PAConv 引入了权重正则化,确保权重库中的矩阵保持多样性。正则化的损失函数 L c o r r L_{corr} Lcorr 通过减少权重矩阵之间的相关性来实现:
L c o r r = ∑ B i , B j ∈ B , i ≠ j ∣ B i ⋅ B j ∣ ∣ ∣ B i ∣ ∣ 2 ∣ ∣ B j ∣ ∣ 2 L_{corr} = \sum_{B_i, B_j \in B, i \neq j} \frac{| B_i \cdot B_j |}{||B_i||_2 ||B_j||_2} Lcorr=∑Bi,Bj∈B,i=j∣∣Bi∣∣2∣∣Bj∣∣2∣Bi⋅Bj∣
其中:
- B i B_i Bi 和 B j B_j Bj 是权重库中的两个不同权重矩阵。
- ∣ ∣ B i ∣ ∣ 2 ||B_i||_2 ∣∣Bi∣∣2 和 ∣ ∣ B j ∣ ∣ 2 ||B_j||_2 ∣∣Bj∣∣2 是权重矩阵的 L 2 L_2 L2 范数。
- L c o r r L_{corr} Lcorr 用于最小化不同权重矩阵之间的相似性,确保生成的卷积核具有足够的多样性。
如何使用方法改进PointNet++网络
改进位置
- 动态卷积核替换 MLP 层:利用 PAConv 替代 MLP 层,使得 PointNet++ 更好地捕捉点云的空间关系和几何结构。
这篇关于PointNet++改进策略 :模块改进 | PAConv,位置自适应卷积提升精度的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





