icp专题

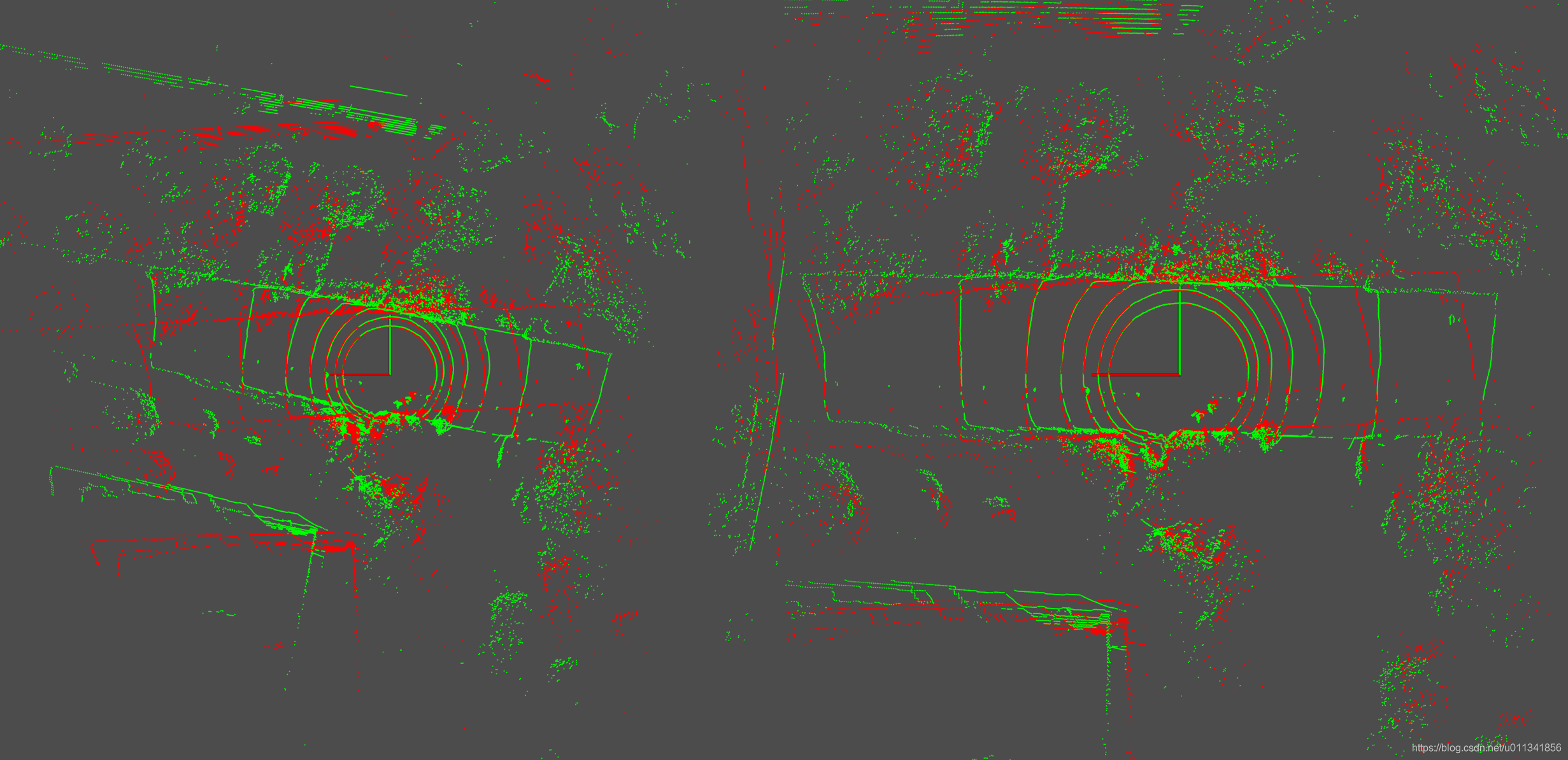
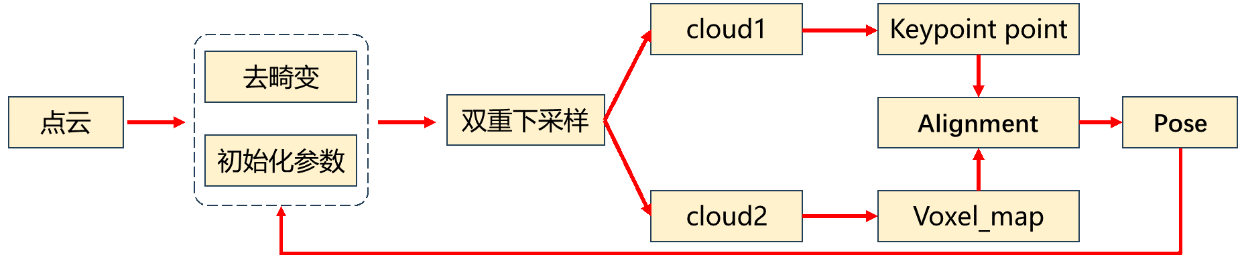
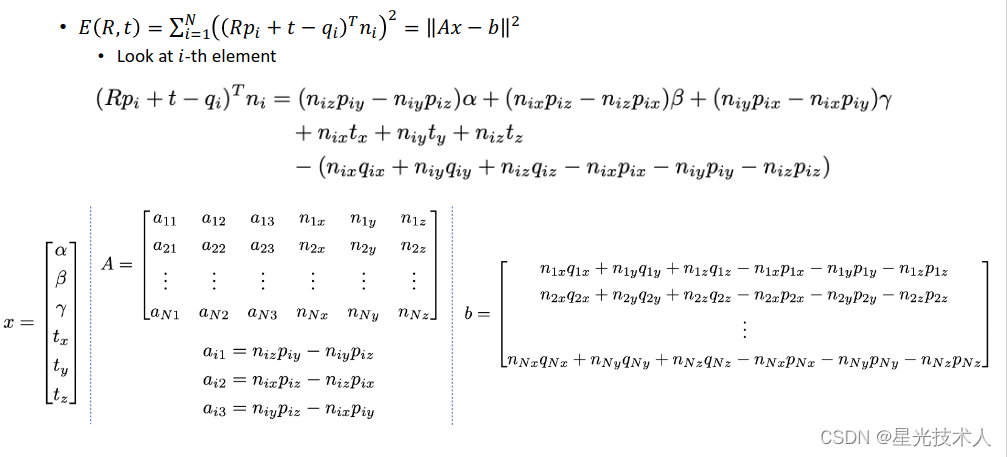
点云配准之ICP和NDT算法的高斯牛顿法求解
ICP算法 NDT算法 代码:https://github.com/taifyang/pointcloud-registration 参考:高翔《自动驾驶与机器人中的SLAM技术》

【单片机开发】单片机的烧录方式详解(ICP、IAP、ISP)
【前言】 在单片机开发过程中,程序的烧录是一个至关重要的环节。随着技术的不断演进,单片机烧录方式也日益多样化。本文将重点讲解单片机中三种常见的烧录方式:ICP(In-Circuit Programming)、ISP(In-System Programming)和IAP(In-Application Programming),并探讨它们各自的特点与应用场景。 1. ICP(In-Circuit

【学习记录】ICP类点云配准算法总结
〇、ICP 在点云配准或者激光SLAM领域,ICP类算法一直是一个比较经典的算法。研二时写的那篇综述也有过总结,对于激光SLAM而言,ICP类算法属于是scan-to-scan里面基于距离的一种配准算法。对于最纯粹的ICP算法,其基本思想就是用整帧点云,用一个初始的变换矩阵T进行投影,将当前帧点云投影到前一帧点云,之后利用kd-tree结构,利用距离这一指标筛选出一个最近点,计算投影点到所有最近

不同ICP方法简单对比
不同ICP方法比较 论文代码trimesh中的实现 测试PCL 中的ICP对比trimesh2 中的ICP对比 接触到一种新的ICP方法,测试看一下效果。 论文 A Symmetric Objective Function for ICP The Iterative Closest Point (ICP) algorithm, commonly used for
发布微信小程序需要icp证吗?
微信小程序需要办理ICP许可证吗? 微信小程序需不需要办理ICP许可证,具体要看你的小程序类目是什么,还要看你的小程序具体是做什么的? 根据《互联网信息服务管理办法》 第四条 国家对经营性互联网信息服务实行许可制度;对非经营性互联网信息服务实行备案制度。 未取得许可或者未履行备案手续的,不得从事互联网信息服务。 第七条 从事经营性互联网信息服务,应当向省、自治区、直辖市电信管理机构或者
ICP和NDT匹配算法精度、速度和鲁棒性对比
注意:如下实验是针对里程计任务而进行的,默认是帧间匹配,而对于帧到局部地图匹配情况下的长时间下的轨迹精度对比,请参考我的这篇博客: 【附优化方法的ICP源码】ICP与NDT匹配算法精度对比,以及手动实现的ICP和基于优化方法的ICP精度对比 1.实验条件 前提:以下ICP与NDT算法均使用的是PCL 1.8库中提供的实现方法,它们可以设置的参数较多,这里只探讨那些最常用的参数。 数据:杭州海

使用迭代最近点 (ICP) 算法在 Open3D 中对齐点云
一、Open3D 简介及其功能 Open3D 是一个现代库,它提供了用于处理 3D 数据的各种工具。在其功能中,它提供了高效的数据结构和算法来处理点云、网格等,使其成为在计算机视觉、机器人和图形领域工作的研究人员和从业人员的不错选择。Open3D 的特点之一是它实现了迭代最近点 (ICP) 算法,该算法用于模型对齐任务。 二、Open3D 和 ICP 入门 迭代最近点 (ICP)

APP上架 篇三:ICP备案
文章目录 系列文章ICP备案简介非经营性备案与经营性备案ICP备案官网ICP备案流程ICP备案实例(阿里云服务器+新网域名)ICP备案费用ICP许可证的流程和费用 系列文章 APP上架 篇一:上架资质要求 APP上架 篇二:注册域名 APP上架 篇三:ICP备案 系列计划预告: APP上架 篇二:计算机软件著作权证书和APP电子版权证书 ICP备案简介 ICP备案,全

基于Open3D的点云处理24-ICP匹配cuda加速
参考:docs/jupyter/t_pipelines/t_icp_registration.ipynb 完整测试用例: import open3d as o3dimport open3d.core as o3cif o3d.__DEVICE_API__ == 'cuda':import open3d.cuda.pybind.t.pipelines.registration as treg

Python 点对点的ICP配准算法
目录 一、算法概念二、代码示例三、结果示例 一、算法概念 点云ICP配准(Iterative Closest Point Registration)是一种将两个或多个点云数据集对齐的算法。其工作原理是通过迭代的方式,找出一个最优的刚体变换矩阵,将一个点云数据集的点对应到另一个点云数据集上的对应点,使得两个点云之间的误差最小化。 二、代码示例 import copy

ICP Star2Star 黑客松获奖专访|锚定 IC 生态红利,释放创新潜能
当全世界超 83% 的企业都在使用云服务搭建技术业务时,云存储、云计算领域出现了集中、垄断、专制情形,DFINITY 创新提出 “公共计算机”概念,朝着达成用户数据主权的目标迈出坚实的步伐,致力于打造去中心化、高效便捷的友好技术生态。 为了帮助更多开发者实现在 IC 生态的项目拓新,由 TinTinLand 联合 Blockchain Academy 共同主办的「区块链快速入门到开发实战
从零入门激光SLAM(十四)——简单有效的激光里程计KISS-ICP
KISS-ICP: In Defense of Point-to-Point ICP Simple, Accurate, and Robust Registration If Done the Right Way 论文地址:KISS-ICP: In Defense of Point-to-Point ICP – Simple, Accurate, and Robust Registration I

ICP(迭代最近点)算法
图像配准是图像处理研究领域中的一个典型问题和技术难点,其目的在于比较或融合针对同一对象在不同条件下获取的图像,例如图像会来自不同的采集设备,取自不同的时间,不同的拍摄视角等等,有时也需要用到针对不同对象的图像配准问题。具体地说,对于一组图像数据集中的两幅图像,通过寻找一种空间变换把一幅图像映射到另一幅图像,使得两图中对应于空间同一位置的点一一对应起来,从而达到信息融合的目的。 一个经典的应用是场景
ICP算法(Iterative Closest Point)及VTK实现
原文地址:ICP算法(Iterative Closest Point)及VTK实现 作者:小星星恋上大太阳 转载而来 ,自己学的医学图像 ,所以算法原理尚可借鉴,这篇原理讲的很不错 网上搜了很多 始终不明白 似乎这次能知道个来龙去脉了。非常感谢该版主~~~ ICP算法最初由Besl和Mckey提出,是一种基于轮廓特征的点配准方法。基准点在CT图像坐标系及世界坐标系下的坐标点集P =

小程序备案和icp备案有什么区别
小程序备案和ICP备案是两种不同的备案类型,它们在备案对象和备案范围上有所不同。 1. 备案对象: - 小程序备案:小程序备案适用于在微信小程序平台上开发并发布的小程序。 - ICP备案:ICP备案适用于在公网上发布的网站,包括企业、个体工商户和个人等所有者的网站。 2. 备案范围: - 小程序备案:小程序备案主要涉及小程序的基本信息、运营者、管理员等,并需要进行公

阿里云备案服务器选什么配置?用于ICP备案
阿里云备案服务器买哪种合适?就买阿里云最便宜的服务器30元3个月、61元一年和99元一年,这三款云服务器均支持备案,并且一台服务器可以备案5个网站,太划算了,阿里云服务器网aliyunfuwuqi.com整理备案服务器入口 aliyunfuwuqi.com/go/aliyun 链接打开如下图: 阿里云备案服务器 阿里云支持备案的服务器至少3个月时长,如上图,2核4G服务器3个月价

从零开始搭二维激光SLAM --- 基于PL-ICP的帧间匹配
上一篇文章将了如何使用PCL中的ICP算法进行相邻帧间的坐标变换,ICP的计算时间以及精度都不太好. 这篇文章我使用一种ICP的改进算法PL-ICP算法来计算相邻帧间的坐标变换. 1 PL-ICP PL-ICP(Point to Line ICP) 使用点到线距离最小的方式进行ICP的计算,收敛速度快很多,同时精度也更高一些. 具体的pl-icp的介绍请看其论文,作者也开源了pl-icp的

如何获得ICP备案服务码?
服务码获取规则 域名备案需要ICP备案服务码,服务码需要购买服务器获得,阿里云的服务器获取服务码的规则如下。 * 不同类型的服务器可申请的ICP备案服务码数量不同,新增备案一个网站需使用一个ICP备案服务码,注销或取消接入后无法再次使用。 * 2018年5月21日起,轻量应用服务器申请ICP备案服务码需购买时长在3个月及以上(含续费)。 * 2018年4月20日起,建站市场产品申请ICP备案

网站ICP备案和公安备案教程
由于最近华为云那边的服务器到期了,而续费的价格比较贵一点,刚好阿里云这边有活动就入手了一台,但是将网站迁移过来后发现又要进行ICP备案,那就备案呗。但是备案完成之后发现还有一个公安备案,真让人头大啊... 很多人也许不理解,网站已经域名备案了,为什么还要进行公安备案? 网站ICP备案 网站通过了ICP备案就表示允许在中华人民共和国境内从事互联网信息服务。如果没有通过ICP备案,国内的服

2023最新ICP备案查询系统源码 附教程 Thinkphp框架
正文: 2023最新ICP备案查询系统源码 附教程 thinkphp框架 本系统支持网址备案,小程序备案,APP备案查询,快应用备案查询 优势: 响应速度快,没有延迟,没有缓存,数据与官方同步 程序: wwehgo.lanzouv.com/iMzYc1ap8e1a 图片:

2023 最新 ICP备案查询系统源码 带安装教程
支持app,网址,小程序,快应用的备案查询系统,使用thinkphp开发 2023 最新 ICP备案查询系统源码 带安装教程2023 最新 ICP备案查询系统源码 带安装教程2023 最新 ICP备案查询系统源码 带安装教程2023 最新 ICP备案查询系统源码 带安装教程2023 最新 ICP备案查询系统源码 带安装教程2023 最新 ICP备案查询系统源码 带安装教程2023 最新 IC
点云配准9:Colored-ICP的Open3D实现
目录 写在前面准备原理代码实现参考完 写在前面 本文内容 基于Open3D实现;Colored-ICP算法进行点云配准;包含CMakeLists,cpp源码,代码解析,编译脚本,运行结果可视化;提供免费的可执行文件以及使用说明:待上传 平台/环境 Windows10, Ubuntu1804, CMake, Open3D转载请注明出处: https://blog.csdn.net/
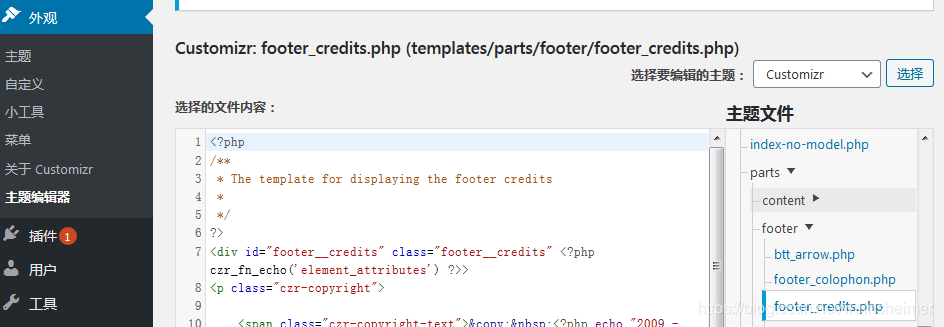
WordPress如何修改底部版权All Rights Reserved 和ICP备案信息和相关的坑
WordPress每页下面在每个主题都有专门的地方写 Copyright © 2019 All Rights Reserved. Powered by – Designed with xxx 这是最先要修改的地方。 具体的位置在你的WordPress网页管理界面的下面的菜单里 Appearance → Editor → templates → parts → footer → footer_cr

ICP-MS分析仪器配套的器皿有哪些?
电感耦合等离子体质谱(ICP-IS)具有检出限低、动态线性范围宽、干扰少、分析精度高、分析速度快、可进行多元素同时测定等优异的分析性能,已成为痕量和超痕量分析最为有效的分析手段之一。可广泛用于环境、食品、药品、化妆品、轻工玩具、材料等行业,是痕量元素分析的重要手段。 南京瑞尼克专注痕量分析器皿,配套的特氟龙器皿齐全。 PFA容量瓶,A级定容级别 PFA样品瓶,超低本底,长期保存高纯试剂

ICP算法实现(C++)
用C++实现的ICP(Iterative Closest Point,迭代最近点)算法,借助了PCL库实现点云基本变换、KD-tree以及可视化部分,核心迭代部分没有调用PCL的api。代码在KD-tree搜索部分采用了openmp加速优化,在适当的数据集下运行速度能超过PCL自带的ICP算法配准api。 ICP算法的原理和推导,网上有很多,在此不赘述。下面链接是我觉得讲的比较详细的,可以参考: