eigen专题

使用 Eigen 库中的 Kronecker 积运算
前言 在数值计算和线性代数的众多应用中,Kronecker 积(Kronecker Product)是一种常用的矩阵运算。Eigen 是一个高性能的 C++ 数值计算库,广泛用于科学计算和工程应用中。在 Eigen 库中,Kronecker 积运算属于不常用的扩展功能,因此被放置在 unsupported 模块中。 本文将介绍如何在 Eigen 中使用 Kronecker 积,并解释为什么这个

Eigen::Tensor使用,定义高维矩阵
在实际项目中,需要存储大于等于三维的矩阵,而平常中我们使用Eigen::MatrixXd二维数据,这里我们使用Eigen::Tensor来定义 1.Using the Tensor module #include <unsupported/Eigen/CXX11/Tensor> 2.定义矩阵 2.一般矩阵 官方文档 // 定义一个2x3x4大小的矩阵Eigen::Tensor<f

Ubuntu中PCL、Eigen、ROS、Ceres、VScode相关操作,安装,卸载,文件存储位置基础合集
Ubuntu中PCL相关操作 查看PCL对应的版本号 apt-cache show libpcl-dev 卸载PCL相关命令 sudo apt-get remove libpcl-dev 如果想要完全卸载相关软件包及其配置文件,需要加上--purge参数: sudo apt-get --purge remove libpcl-dev Ubuntu中eigen相关操作 ubunt
CMake构建学习笔记9-Eigen库的构建
Eigen是一个高性能的C++线性代数库,广泛用于科学计算、机器学习、计算机视觉等领域。不过,Eigen有点特别,它是一个纯头文件实现的库;也就是说,任何一个程序要引入它,只要include它的头文件就可以了。这天然就规避了不同操作系统不同编译器造成的二进制兼容的问题,所有的实现都include源代码了,那还不是轻松跨平台? 像Eigen这种风格的库就被称为Header Only库。这种库使用起

Eigen学习(二)
本文算是对官网手册的翻译吧,参考:http://eigen.tuxfamily.org/dox/group__TutorialMatrixClass.html Matrix类 在Eigen中,所有的矩阵和向量都是Matrix模板类的对象,向量只是特殊的矩阵而已,无论是行向量还是列向量。 Matrix类共有6个模板参数,主要使用的是前三个参数,剩余的都有默认值,前三个参数分别是 Matrix

LSSS算法实现,基于eigen和pbc密码库【一文搞懂LSSS,原理+代码】
文章目录 一. LSSS简介1.1 概述1.2 线性秘密分享方案(LSSS)与 Shamir的秘密分享方案对比LSSS1.2.1 Shamir的秘密分享方案1.2.2 线性秘密分享方案(LSSS)1.2.3 主要区别 二. 基于矩阵的LSSS加解密原理分析2.1 LSSS矩阵构造2.1.1 定义2.1.2 规则 12.1.3 规则 22.1.4 规则 32.1.5 形成线性共享矩阵M 2.

Eigen中 Row-Major 和 Column-Major 存储顺序的区别
Eigen中 Row-Major 和 Column-Major 存储顺序的区别 flyfish Eigen::RowMajor 是 Eigen 库中用于指定矩阵存储顺序的一种选项 理解 Row-Major 和 Column-Major 存储顺序的区别,绘制一个单一的图来显示内存中的元素访问顺序,在图中用箭头表示访问顺序. import numpy as npimport matplotl
Eigen::Isometry3d变换矩阵的常用方法
文章目录 Eigen::Isometry3d变换矩阵的常用方法一、基本定义二、操作方法三、与四元数和平移向量的转换四、左乘与右乘 Eigen::Isometry3d变换矩阵的常用方法 一、基本定义 变换矩阵本质是一个4*4的矩阵 Eigen::Isometry3d T_imu_to_lidar = Eigen::Isometry3d::Identity() 二、操作方法

笔记100:使用 OSQP-Eigen 对 MPC 进行求解的方法与代码
1. 前言: 我们在对系统进行建模的时候,为了减少计算量,一般都将系统简化为线性的,系统如果有约束,也是将约束简化为线性的; 因此本篇博客只针对两种常见系统模型的 MPC 问题进行求解: 线性系统 + 无约束线性系统 + 线性约束 a a a a 2. 线性系统 + 无约束的 MPC 问题求解 目前已知: 目标(代价)函数: 矩阵 ,, 均为正定矩阵;线性系统状态空
【eigen】——apt,conda安装方式
1. conda 只能使用官方的源进行安装 conda install -c conda-forge eigen Please update conda by running$ conda update -n base -c defaults conda## Package Plan ##environment location: /home/darknet/miniconda3/envs/t
Ubuntu18.04 重装/升级 eigen 教程
目录 一、Eigen 1.1 ubuntu 查看 eigen 版本 1.2 卸载 老版本 eigen 二、安装 eigen 3.4.0 2.1 配置安装 2.2 查看版本 一、Eigen 1.1 ubuntu 查看 eigen 版本 $ dpkg -l | grep eigen 1.2 卸载 老版本 eigen sudo updatedblocate eigen3
使用Eigen将经纬度、高程、偏北角转成变换矩阵
目录 1、前言 2、示例 3、代码解析 4、垂直于给定点的切平面变换 5、代码解析 1、前言 在地球表面进行刚体变换时候,要将具有经纬度、高程和偏北角的坐标信息转换为变换矩阵表达,首先需要了解坐标系之间的转换关系。 通常,我们会将经纬度坐标转换为地心坐标系(ECEF坐标系),然后再根据高程和偏北角进行变换。 2、示例 #include <iostream>#i
C++之Eigen库基本使用(下)
1、常见变换 Eigen::Matrix3d //旋转矩阵(3*3)Eigen::AngleAxisd //旋转向量(3*1)Eigen::Vector3d //欧拉角(3*1)Eigen::Quaterniond //四元数(4*1)Eigen::Isometry3d //欧式变换矩阵(4*4)Eigen::Affine3d //放射
Eigen求解线性方程组
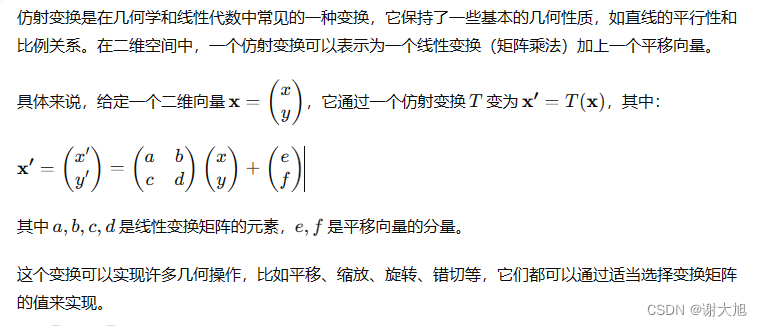
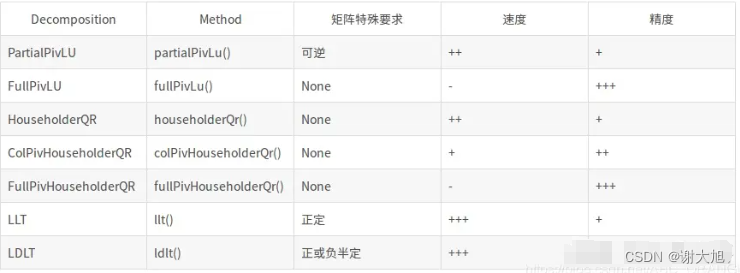
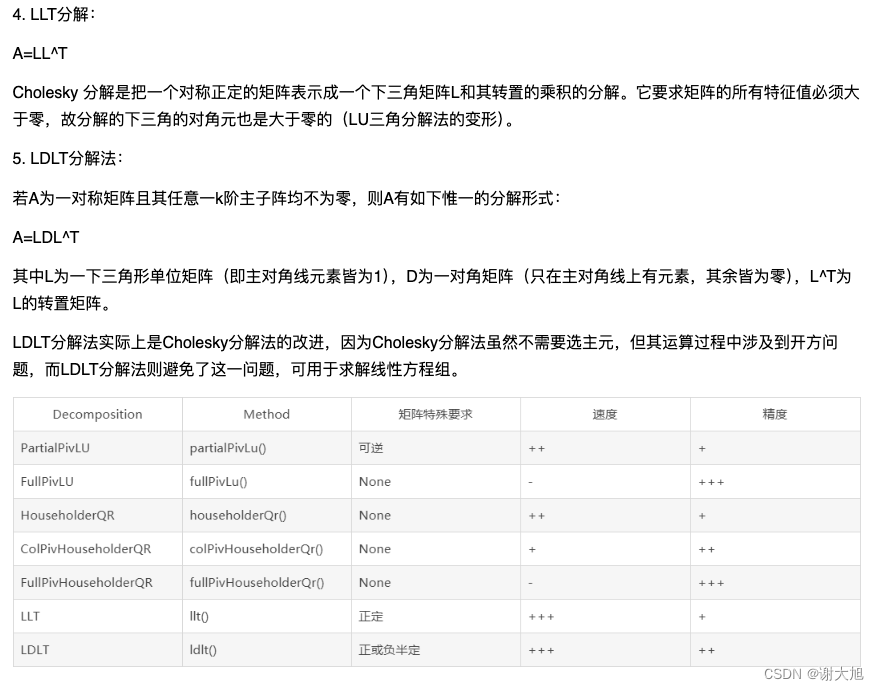
1、线性方程组的应用 线性方程组可以用来解决各种涉及线性关系的问题。以下是一些通常可以用线性方程组来解决的问题: 在实际工程和科学计算中,求解多项式方程的根有着广泛的应用。 在控制系统的设计中,我们经常需要求解特征方程的根来分析系统的稳定性; 在图像处理和模式识别中,多项式方程的根可以用来寻找图像的特征点; 在金融工程和风险管理中,多项式方程的根可以用来对数据进行拟合和预测。 工程问
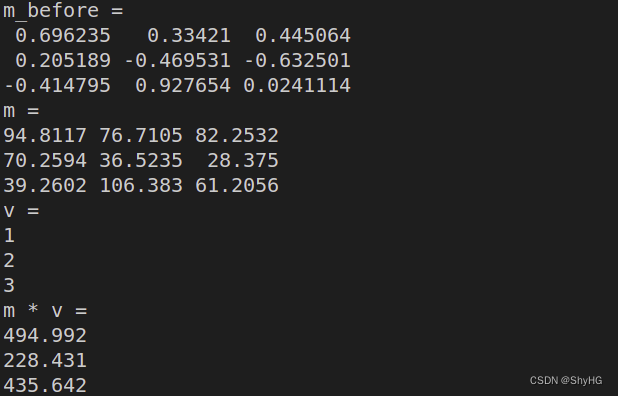
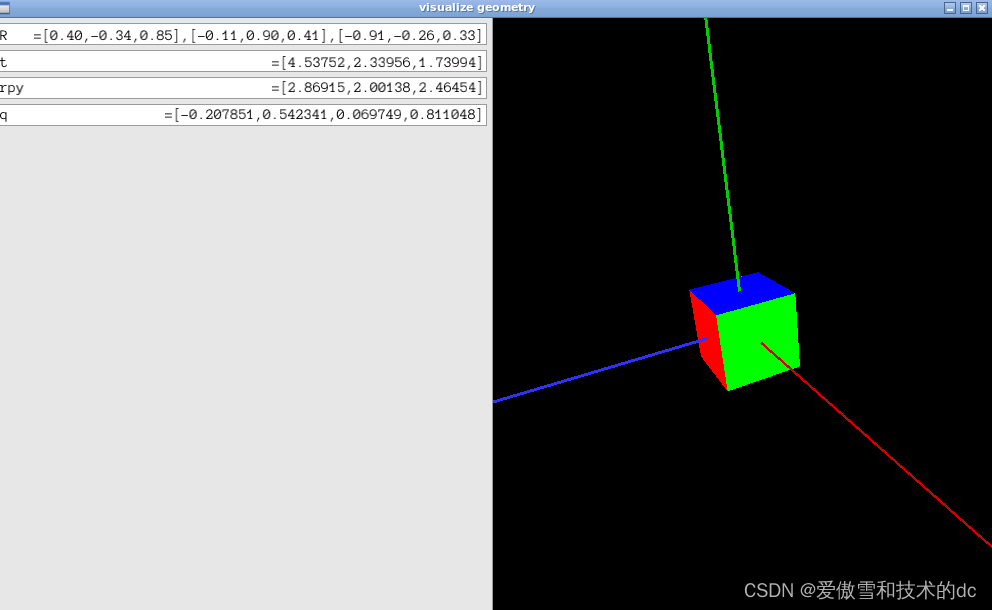
eigen在c++的基本使用,矩阵运算,几何运算
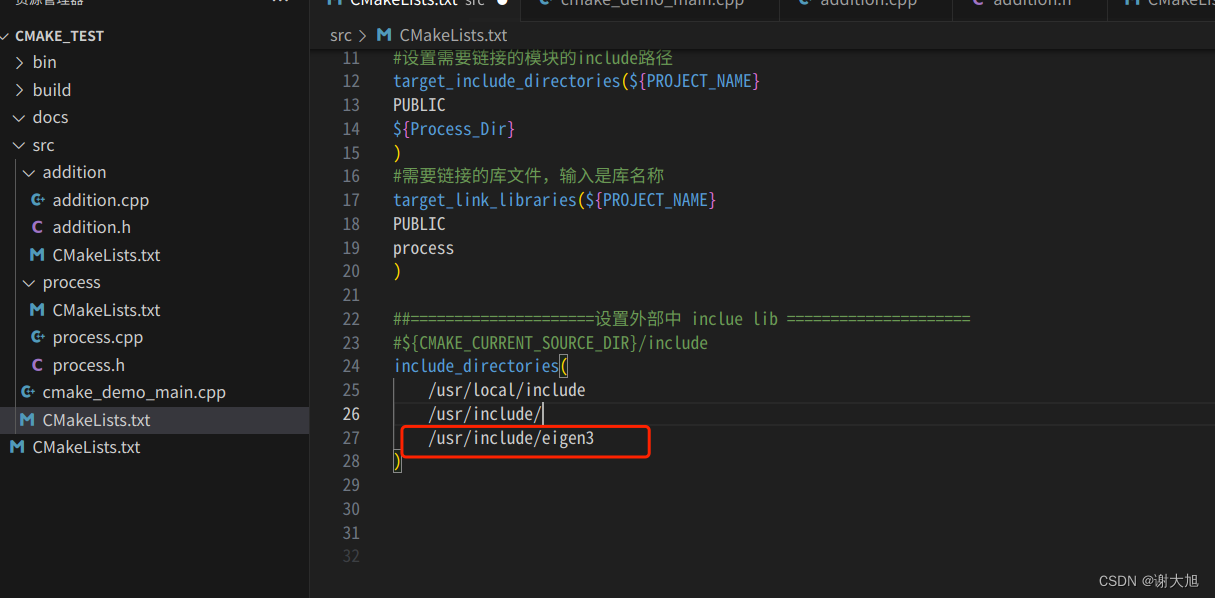
矩阵运算 CMakeLists.txt文件 cmake_minimum_required(VERSION 3.2)project(useEigen)set(CMAKE_BUILD_TYPE "Release")set(CMAKE_CXX_FLAGS "-O3")include_directories("/usr/include/eigen3")add_executable(eigenMa
pcl中Eigen::Affine3f变换点云异常
问题来源 在使用pcl::transformPointCloudWithNormals变换点云的时候出现异常,即变换后的点云非原始点云的形状; 为什么? 主要是在创建Eigen::Affine3f时没有对旋转矩阵进行归一化,导致变换后的点云出现异常;解决方案:对旋转矩形进行归一化操作;即在使用Eigen::Affine3f需要时刻想到归一化问题; 创建Eigen::Affin
C++之Eigen使用(使用cmake)
1、eigen安装 安装命令如下: sudo apt-get updatesudo apt-get install libeigen3-dev 默认安装路径为: /usr/include/eigen3 2、使用cmake 添加eigen头文件,由于eigen只有头文件,因此只要添加头文件即可。 3、其他 3.1 cmake内置变量 C
Eigen库从入门到放弃(2. Getting Started)
Eigen的头文件定义了多种类型,但是对于简单的来说,使用MatrixXd就足够了,MatrixXd表示任意尺寸的矩阵,但是要注意数据类型是double的。Eigen/Dense的头文件定义了所有MatrixXd和相关类型的成员函数。所有头文件中定义的函数都是在Eigen这个命名空间下的。 我们再次分析一下上面的代码: MatrixXd m(2,2); // 定义两行两列,前面是行数,后面是列
C++版NumPy-Eigen库快速入门
Eigen库的使用 零、前言一、Eigen矩阵类1、矩阵类模板参数2、向量3、特值动态4、矩阵和向量的初始化5、矩阵和向量的存取6、逗号初始化7、调整大小 二、矩阵和向量算法1、加减2、标量乘法和除法3、转置、共轭和伴随4、矩阵矩阵和矩阵向量乘法5、点积和叉积6、基本算术归约运算7、操作的有效性三、数组类和按系数运算1、数组类2、访问数组内的值3、加减4、数组乘法5、其他系数运算6、在数组和

《OpenCV编译》十三、编译Eigen
1、下载Eigen;下载地址:http://eigen.tuxfamily.org/index.php?title=Main_Page 2、打开CMake开始编译,选择源码位置和build位置 3、配置编译环境 4、勾选项如下: 5、生成解决方案并打开项目 6、VS2017中,使用批生成,只选择Install即可 7、生成成功

C++之eigen库学习
Eigen是一个高性能的C++模板库,专门用于线性代数、矩阵和向量运算。该库提供了一系列的类和函数,使开发者能够轻松进行各种数学计算,如矩阵乘法、矩阵分解(如QR分解、奇异值分解等)、特征值计算、求解线性方程组等。 以下是Eigen库的一些主要特点: 模板化设计:Eigen完全基于C++模板编写,这使得它能够提供高度的代码灵活性和优化能力。通过模板化设计,Eigen能够自动生成适合特定数据类型
Eigen教程:C++线性代数库详解
Eigen是一个高效、优雅的C++模板库,用于线性代数、矩阵和向量运算、数值分析及其相关算法。它提供了类似Matlab的语法和接口,使得编写代码变得简洁明了。Eigen经过精心设计,充分发挥了C++语言的优势,在运行效率、内存管理等方面表现出色。 本文将详细介绍Eigen库的使用方法,并提供丰富的代码示例,帮助读者快速入门并掌握这一强大工具。 一、Eigen简介 Eigen是一个开源的C++
小技巧系列——Ubuntu下查看Eigen版本的一种方法(一)
小技巧系列——Ubuntu下查看Eigen版本的一种方法(一) 说明命令 说明 如何在Ubuntu下查看Eigen版本 命令 pkg-config --modversion eigen3
slam三维空间刚体运动及Eigen库的使用
1.理论部分 1.旋转矩阵 旋转矩阵有一些特别的性质。事实上,它是一个行列式为 1 的正交矩阵。反之,行 列式为 1 的正交矩阵也是一个旋转矩阵。所以,我们可以把旋转矩阵的集合定义如下: 由于旋转矩阵为正交阵,显然 RT 刻画了一个相反的旋转。 我们把一个三维向量的末尾添加 1,变成了四维向量,称为齐次坐标。 齐次坐标。它是射影几何里的概念。通过添加最后一维,我们用四个实数

ubuntu安装使用eigen(vscode)
1、eigen安装 安装命令如下: sudo apt-get updatesudo apt-get install libeigen3-dev 默认安装路径为: /usr/include/eigen3 安装版本查询命令: pkg-config --modversion eigen3 2、CMakeLists.txt cmake_
应用Eigen 的项目
文章目录 扩展,数值计算绑定科学机器人与工程计算机图形学、几何学、可视化移动应用KDE(Eigen的起源) 扩展,数值计算 Google 的 TensorFlow 是一个用于机器智能的开源软件库 谷歌的Ceres求解器是一个可移植的C++库,允许建模和求解大型复杂的非线性最小二乘问题。 Manifold ToolKit MTK 提供了简单的机制,使任意算法能够在流形上运行。它还提