collaborative专题

BM3D--Image Denoising by Sparse 3-D Transform-Domain Collaborative Filtering
系列文章目录 文章目录 系列文章目录前言稀疏三维变换域协同滤波图像去噪摘要1 引言2 分组和协作过滤A.分组B.按匹配分组C.协同过滤D.基于变换域收缩的协同过滤 3 算法结论 前言 论文地址 如果下载不了可以从 https://download.csdn.net/download/m0_70420861/89708940 获取 参考博客 :图像去噪算法:NL-Me

【论文】A Collaborative Transfer Learning Framework for Cross-domain Recommendation
Intro 业界常见的跨域建模方案主要分为两种范式[22][32][5][36][17][14][20]:1) 将源样本和目标样本进行联合和混合,然后执行多任务学习技术,以提高在所有域中的性能;2) 使用混合或数据丰富的源域数据预先训练模型,然后在数据不足的目标域中对其进行微调,以适应新的数据分布。在第一种方法中,通过不同类型的网络设计来学习特定域特征和域不变特征,其中域指标通常用于识别域。在微
Recommender ~ Collaborative filtering
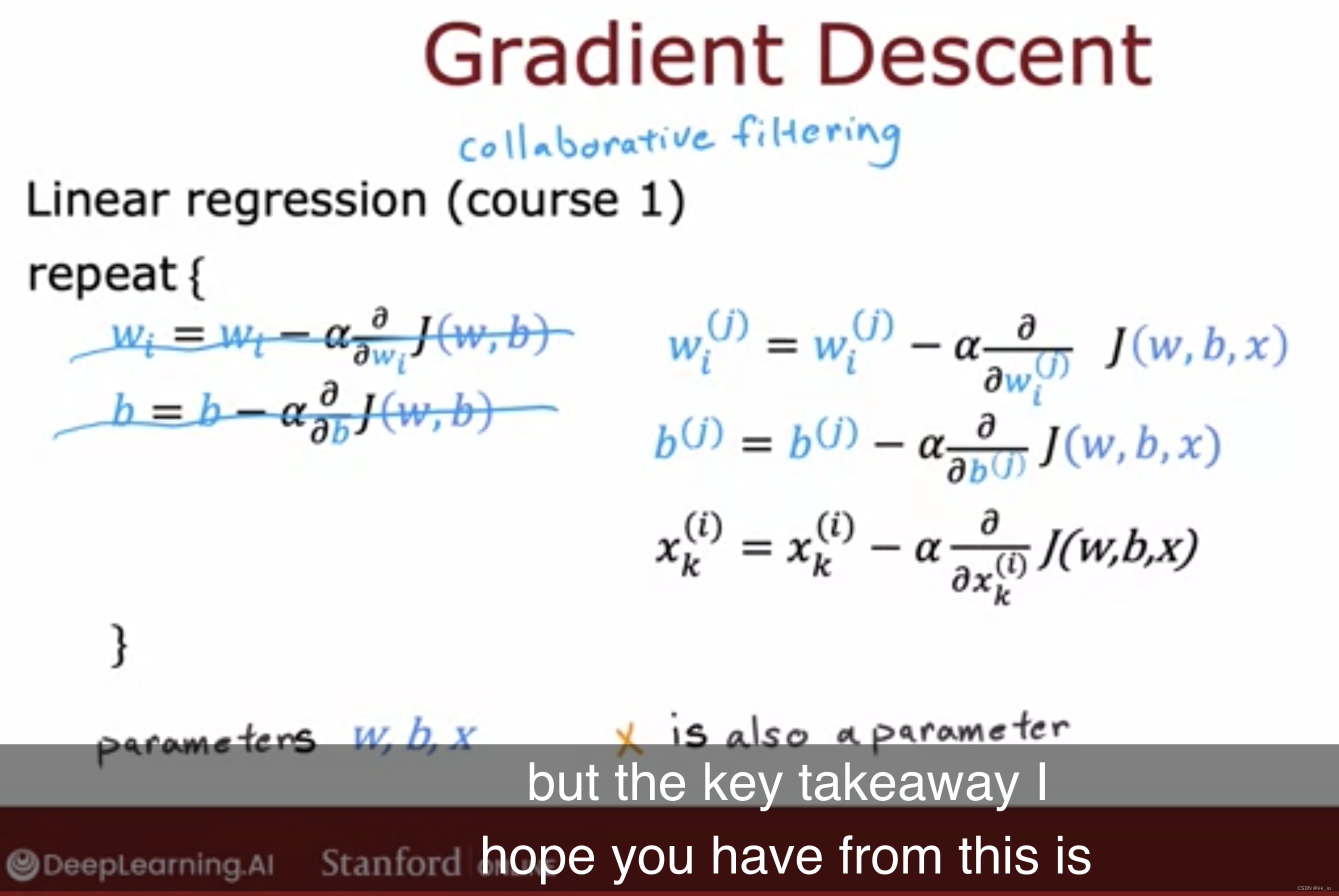
Using per-item features User j 预测 movie i: Cost Function: 仅求和用户投票过的电影。 常规规范化(usual normalization):1/2m 正则化项:阻止过拟合 在知晓X的前提下,如何学习w,b参数: Collaborative filtering algorithm Problem motivation 给定

推荐系统介绍:(协同过滤)—Intro to Recommender Systems: Collaborative Filtering
本文试验前期准备: MovieLens ml-100k数据集Jupyter notebookthemoviedb.org API key 本文试验内容翻译自:http://blog.ethanrosenthal.com/2015/11/02/intro-to-collaborative-filtering/ 添加python引用 import numpy as npimpo
吴恩达机器学习-实践实验室:协同过滤推荐系统(Collaborative Filtering Recommender Systems)
在本练习中,您将实现协作过滤,以构建电影推荐系统。 文章目录 1-概念2-推荐系统3-电影评分数据集4-协作过滤学习算法4.1协同过滤成本函数 5-学习电影推荐6-建议7-祝贺 软件包 我们将使用现在熟悉的NumPy和Tensorflow软件包。 import numpy as npimport tensorflow as tffrom tensorflow impo
协作机器人(Collaborative-Robot)安全碰撞的速度与接触力
协作机器人(Collaborative-Robot)的安全碰撞速度和接触力是一个非常重要的安全指标。在设计和使用协作机器人时,必须确保其与人类或其他物体的碰撞不会对人员造成伤害。 对于协作机器人的安全碰撞速度,一般会设定一个上限值,以确保机器人在与人类或其他物体发生碰撞时不会对人员造成伤害。这个速度上限值通常是根据机器人的最大速度、加速度以及碰撞后的能量损失等因素进行确定的。 对于接触力标准,
20240316-2-协同过滤(collaborative filtering)
协同过滤(collaborative filtering) 直观解释 协同过滤是推荐算法中最常用的算法之一,它根据user与item的交互,发现item之间的相关性,或者发现user之间的相关性,进行推荐。比如你有位朋友看电影的爱好跟你类似,然后最近新上了《调音师》,他觉得不错,就会推荐给你,这是最简单的基于user的协同过滤算法(user-based collaboratIve filt

C3_W2_Collaborative_RecSys_Assignment_吴恩达_中英_Pytorch
Practice lab: Collaborative Filtering Recommender Systems(实践实验室:协同过滤推荐系统) In this exercise, you will implement collaborative filtering to build a recommender system for movies. 在本次实验中,你将实现协同过滤来构建一个电
【论文整理】自动驾驶场景中Collaborative Methods多智能体协同感知文章创新点整理
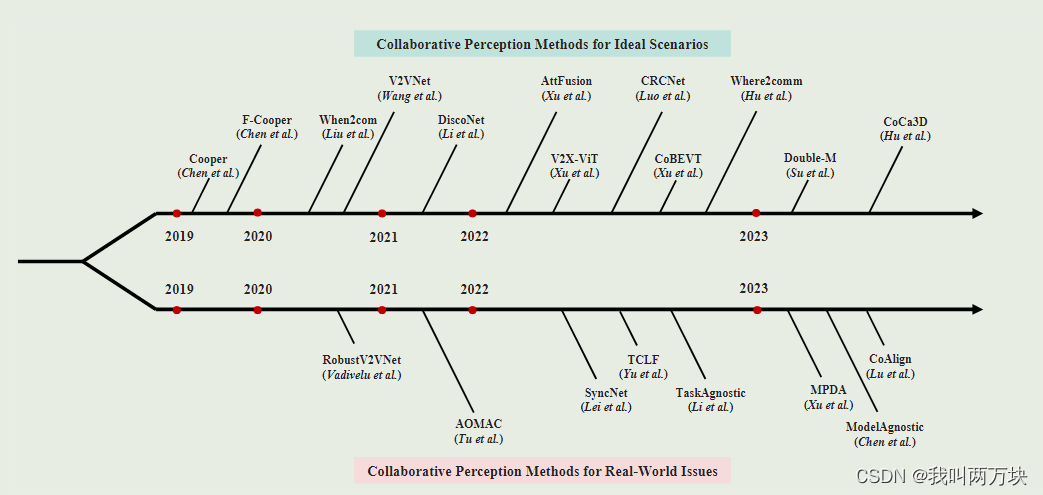
Collaborative Methods F-CooperV2VNetWhen2commDiscoNetAttFusionV2X-ViTCRCNetCoBERTWhere2commDouble-MCoCa3D 这篇文章主要想整理一下,根据时间顺序这些文章是怎么说明自己的创新点的,又是怎么说明自己的文章比别的文章优越的。显然似乎很多文章只是简单阐述了其他文章的思路,关于优点与不足之处
C3_W2_Collaborative_RecSys_Assignment_吴恩达_中英_Pytorch
Practice lab: Collaborative Filtering Recommender Systems(实践实验室:协同过滤推荐系统) In this exercise, you will implement collaborative filtering to build a recommender system for movies. 在本次实验中,你将实现协同过滤来构建一个电
【论文解读】Uncertainty Quantification of Collaborative Detection for Self-Driving
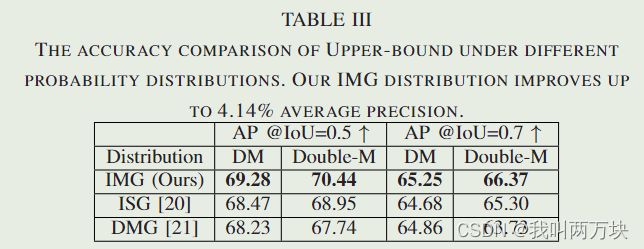
Uncertainty Quantification of Collaborative Detection for Self-Driving 摘要引言方法问题定义方法概览Double-M 实验结论 摘要 在联网和自动驾驶汽车(CAVs)之间共享信息从根本上提高了自动驾驶协同目标检测的性能。然而,由于实际挑战,CAV 在目标检测方面仍然存在不确定性,这将影响自动驾驶中的后续模块,例

CDTS: Collaborative Detection, Tracking, and Segmentation for Online Multiple Object Segmentation
来源:ICCV2017 创新点:(MOS,但是提到了MOT的方法) 本文提出了一种新颖的在一个视频序列分割多个物体的在线算法。开发出联合检测、跟踪和分割的技术去精确地提取多个分段轨迹。第一,将检测器和跟踪器联合使用以生成目标(objects)的多个边界框轨迹。第二,通过使用ASE(alternate shrinking and expansion)分割技术将每个边界框转换成为一种像素级别的
【论文解读】Latency-Aware Collaborative Perception
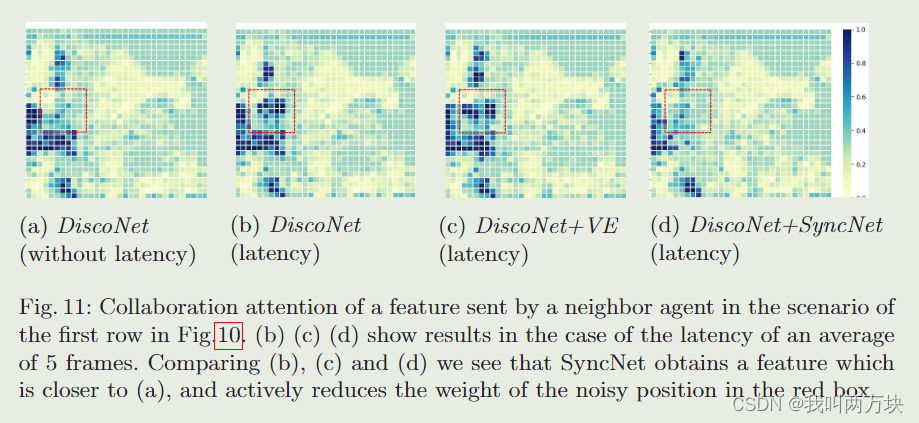
Latency-Aware Collaborative Perception 摘要引言方法SystemSyncNet 实验 摘要 协作感知最近显示出提高单智能体感知感知能力的巨大潜力。现有的协同感知方法通常考虑理想的通信环境。然而,在实践中,通信系统不可避免地存在延迟问题,导致安全关键应用中潜在的性能下降和高风险,如自动驾驶。为了减轻不可避免的延迟造成的影响,从机器学习的角度来看

【论文阅读】Multi-AUV Collaborative Data Collection Algorithm Based on Q-Learning in Underwater Acoustic S
文章目录 论文基本信息摘要1.引言2.相关工作A. 基于聚类算法的数据采集算法B. 基于AUV轨迹规划的数据采集算法 3.网络和通信模型A. 网络模型B. 问题描述C. 通信模式 4.THE QL-DGA ALGORITHMA. Overview of the QL-DGAB. Node Clustering PhaseC. AUV Task AllocationD. AUV Path Pl

【深度学习:Collaborative filtering 协同过滤】深入了解协同过滤:技术、应用与示例
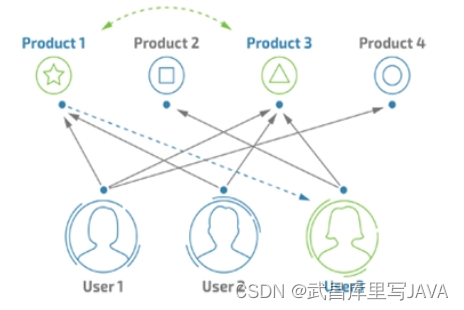
此图显示了使用协作筛选预测用户评分的示例。起初,人们会对不同的项目(如视频、图像、游戏)进行评分。之后,系统将对用户对项目进行评分的预测,而用户尚未评分。这些预测基于其他用户的现有评级,这些用户与活跃用户的评级相似。例如,在我们的例子中,系统已经做出了预测,即活跃用户不会喜欢该视频。 【深度学习:协同过滤】深入了解协同过滤:技术、应用与示例 概述方法类型Memory-basedM

【论文解读】CP-SLAM: Collaborative Neural Point-based SLAM System_神经点云协同SLAM系统(下)
目录 4 CP-SLAM实验 4.1 两个智能体协作( Two-agent Collaboration) 4.2 单智能体回环(Single Agent with Loop) 4.3 地图构建(Map Reconstruction) 4.4 消融实验 姿态图优化(Pose Graph Optimization) 地图细化(Map Refinement) 采样浓度(Samplin
协作机器人(Collaborative-Robot)安全碰撞的速度与接触力
协作机器人(Collaborative-Robot)的安全碰撞速度和接触力是一个非常重要的安全指标。在设计和使用协作机器人时,必须确保其与人类或其他物体的碰撞不会对人员造成伤害。 对于协作机器人的安全碰撞速度,一般会设定一个上限值,以确保机器人在与人类或其他物体发生碰撞时不会对人员造成伤害。这个速度上限值通常是根据机器人的最大速度、加速度以及碰撞后的能量损失等因素进行确定的。 对于接触力标准,

论文总结Discrete collaborative filtering
最近在看这篇较新的基于哈希的协同过滤论文,现在贴几张图片,将论文脉络梳理一下,日后再写总结。 1.首先设计了带有约束条件的损害函数,由于直接将离散约束的损失函数优化得到结果是NP-难问题 2.作者引入了带有约束条件的B‘,D‘两个矩阵,利用B\D与B‘\D’的关系将B\D的约束条件转化 3.得到具有新的形式的损失函数与约束条件,此时的约束条件已经转换为对B‘D’的约束,如下的损
Neural Collaborative Filtering 论文阅读和复现
Neural Collaborative Filtering 论文阅读和复现 AbstractMethodsExperiments and ResultsData set首先是数据理解 功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants 创建一个自定义列表如何创建一个

机器人强化学习——Learning Collaborative Pushing and Grasping Policies in Dense Clutter(ICRA 2021)
1 简介 基于3D视觉联合学习平面推和6DOF抓取,采用Q-learning。 推和抓取使用两个独立的网络,通过采样器获得6-DOF抓取位姿。 2 方法 state:RGBD图像 action:行为基元选择(推、抓取)、末端的三维位置和旋转。 在push动作下,action由图像上二维的点和平面的旋转角构成,机械手在该点处沿旋转角方向推10cm。 如何push物体:Dur
论文阅读:(ICIP 2021)LATENT-SPACE SCALABILITY FOR MULTI-TASK COLLABORATIVE INTELLIGENCE
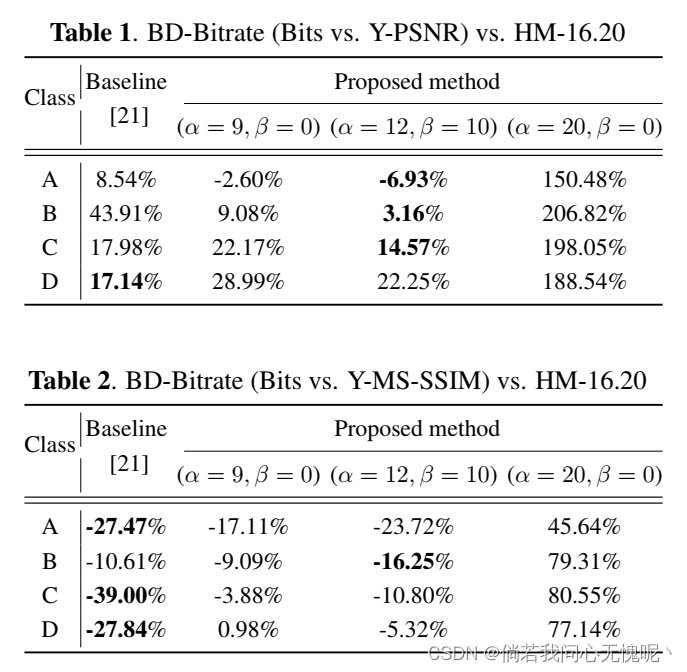
LATENT-SPACE SCALABILITY FOR MULTI-TASK COLLABORATIVE INTELLIGENCE (ICIP 2021) 2022/8/1: 学校终于解封了,终于能出门吃螺狮粉了呜呜呜。 Abstract 研究了多任务协同智能的潜在空间可扩展性,其中一个任务是目标检测,另一个任务是输入重构。在我们提出的方法中,可以有选择地解码部分潜在空间以支持目标检测,而
论文解读-Early Detection of Cybersecurity Threats Using Collaborative Cognition
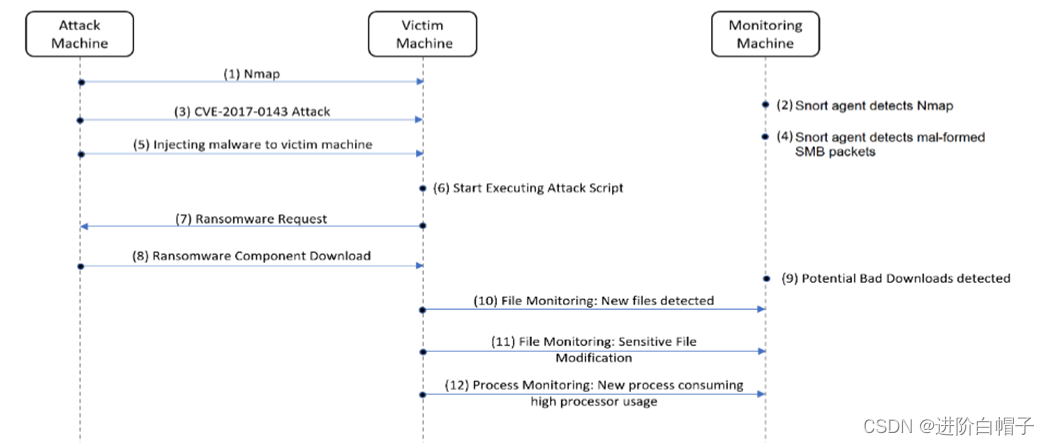
1 概述与介绍 作者描述了一种新颖的协作框架,该框架通过利用语义丰富的知识表示和与不同机器学习技术集成的推理功能来协助安全分析人员。文中介绍的认知网络安全系统从各种文本源中提取信息,并使用一种扩展的UCO安全本体的将其存储在知识图谱中。该系统将知识图谱和基于网络的传感器的各种协作代理组合在一起,进行推理从而为安全管理员提供高质量情报。 目前市面上各种各样的安全工具和系统可用于
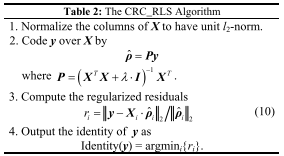
笔记-Sparse Representationor Collaborative Representation: Which Helps Face Recognition
(之前写的笔记了,也是难得写这么多) 论文中心: It is the CR, but not the l1-norm sparsity, that plays the essential role for classification in SRC。 首先:l1-norm与 l2-norm有差不多的作用 其次:发挥核心作用的是CR 论文的核心思路: 大致的思路:在样本充足的情况

【论文阅读】推荐算法之基础 Amazon.com Recommendations Item-to-Item Collaborative Filtering
写在前面: 基于位置的业务场景和不考虑位置信息只考虑相关性或者说相似程度的业务场景,使用item2item的方式还不太一样。举个例子,餐饮中,用户吃饭,不会跑个三五十公里,就算三五十公里外的那个item与用户之前喜欢的item相似度很高,我觉得用户应该不会过去。因此基于位置的业务场景,很大一部分需要考虑距离因素,那么可行的一条路便是:在构建item2item的相似矩阵时,加入距离元素。具体如何加