本文主要是介绍基于粒子群算法优化的长短期记忆神经网络(PSO-LSTM)回归预测,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
粒子群算法优化的长短期记忆(LSTM)神经网络用于回归预测是一种结合了进化计算和深度学习的强大方法。
1. 背景介绍
LSTM神经网络
LSTM(Long Short-Term Memory)是一种特殊的递归神经网络(RNN),特别适用于处理和预测基于时间序列的数据。与传统的RNN不同,LSTM通过引入“记忆单元”和“门控机制”(输入门、遗忘门、输出门)来解决长时间依赖问题,使其能够记住长时间步长内的信息。
粒子群优化(PSO)
粒子群优化(Particle Swarm Optimization,PSO)是一种基于群体智能的优化算法,由Kennedy和Eberhart在1995年提出。PSO模拟鸟群捕食的行为,每个解被看作是一个粒子,通过更新速度和位置来搜索最优解。PSO通过个体极值(pBest)和全局极值(gBest)引导粒子移动,从而在搜索空间中寻找最优解。
2. 方法概述
结合PSO和LSTM的回归预测模型主要步骤包括:
LSTM网络构建:
构建一个基本的LSTM网络结构,通常包括输入层、若干LSTM层、全连接层和输出层。
定义损失函数(如均方误差MSE)和优化器(如Adam)。
PSO算法初始化:
初始化粒子群,每个粒子代表LSTM网络的一组超参数(如学习率、隐藏层单元数、训练轮数等)。
为每个粒子随机初始化位置和速度。
粒子评估:
将每个粒子对应的超参数应用到LSTM网络中,训练网络并计算损失值(例如在验证集上的MSE)。
更新每个粒子的个体极值(pBest)和全局极值(gBest)。
粒子更新:
根据PSO的速度和位置更新公式,更新每个粒子的速度和位置
迭代优化:
重复粒子评估和更新步骤,直到满足停止条件(如达到最大迭代次数或损失函数收敛)。
最终模型训练:
使用最佳粒子(即全局最优解gBest)对应的超参数重新训练LSTM网络,并在测试集上评估性能。
3. 优点
鲁棒性:PSO可以全局搜索最优超参数,避免了传统梯度下降方法可能陷入局部最优的问题。
适应性强:PSO优化可以适应不同的数据集和模型需求,灵活性高。
精度高:通过优化超参数,可以显著提高LSTM模型的预测精度。
4. 应用场景
时间序列预测:如股票价格预测、气象数据预测、销售量预测等。
工程应用:如流量预测、设备寿命预测等。
经济金融:如市场需求预测、经济指标预测等
MATLAB实现部分源代码:
%% 清空环境变量
warning off % 关闭报警信息
close all % 关闭开启的图窗
clear % 清空变量
clc % 清空命令行%% 导入数据
res = xlsread('data.xlsx');
%% 数据分析
num_size = 0.7; % 训练集占数据集比例
outdim = 1; % 最后一列为输出
num_samples = size(res, 1); % 样本个数
%res = res(randperm(num_samples), :); % 打乱数据集(不希望打乱时,注释该行)
num_train_s = ceil(num_size * num_samples)+1; % 训练集样本个数
f_ = size(res, 2) - outdim; % 输入特征维度%% 划分训练集和测试集
P_train = res(1: num_train_s, 1: f_)';
T_train = res(1: num_train_s, f_ + 1: end)';
M = size(P_train, 2);P_test = res(num_train_s + 1: end, 1: f_)';
T_test = res(num_train_s + 1: end, f_ + 1: end)';
N = size(P_test, 2);%% 数据归一化
[p_train, ps_input] = mapminmax(P_train, 0, 1);
p_test = mapminmax('apply', P_test, ps_input);[t_train, ps_output] = mapminmax(T_train, 0, 1);
t_test = mapminmax('apply', T_test, ps_output);indim=size(P_train, 1); % 输入特征维度
outdim = 1; % 最后一列为输出%% 优化算法参数设置
SearchAgents_no = 5; % 数量
Max_iteration = 3; % 最大迭代次数
dim = 3; % 优化参数个数
lb = [1e-3, 10, 1e-4]; % 参数取值下界(学习率,隐藏层节点,正则化系数)
ub = [1e-2, 30, 1e-1]; % 参数取值上界(学习率,隐藏层节点,正则化系数)fitness = @(x)funLSTM(x,p_train,t_train,indim);%构建优化函数
[Best_score,Best_pos,Convergence_curve] = PSO(SearchAgents_no,Max_iteration,lb ,ub,dim,fitness);%% 记录最佳参数
Best_pos(2)=round(Best_pos(2));
best_lr = Best_pos(1, 1);
best_hd = Best_pos(1, 2);
best_l2 = Best_pos(1, 3);
训练进度:

预测结果:

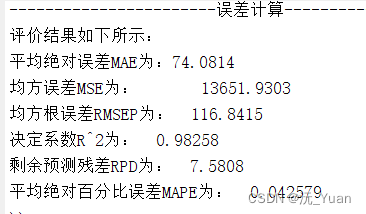
模型评价指标:
完整代码下载:PSO-LSTM
https://mbd.pub/o/bread/ZpaVk5ls
这篇关于基于粒子群算法优化的长短期记忆神经网络(PSO-LSTM)回归预测的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





