本文主要是介绍41 物体检测和目标检测数据集【李沐动手学深度学习v2课程笔记】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
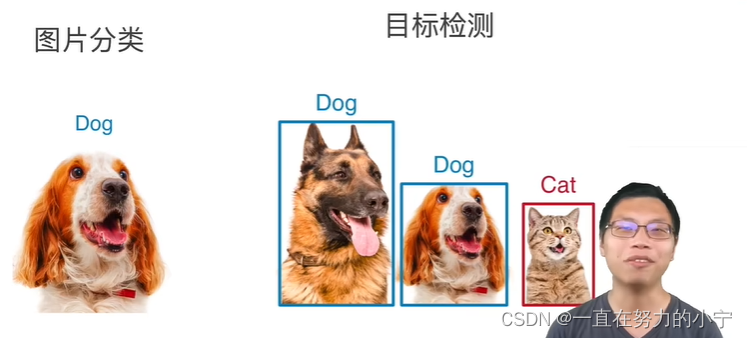
1. 物体检测
2. 边缘框实现
3.数据集
4. 小结
1. 物体检测
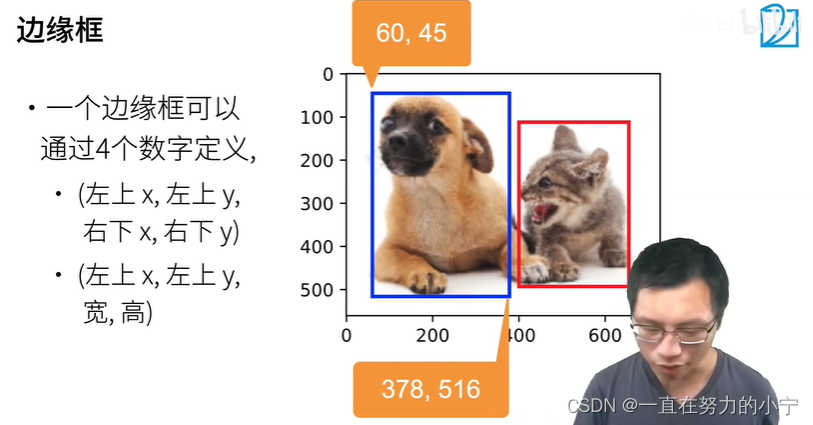

2. 边缘框实现
%matplotlib inline
import torch
from d2l import torch as d2ld2l.set_figsize()
img = d2l.plt.imread('../img/catdog.jpg')
d2l.plt.imshow(img);#@save
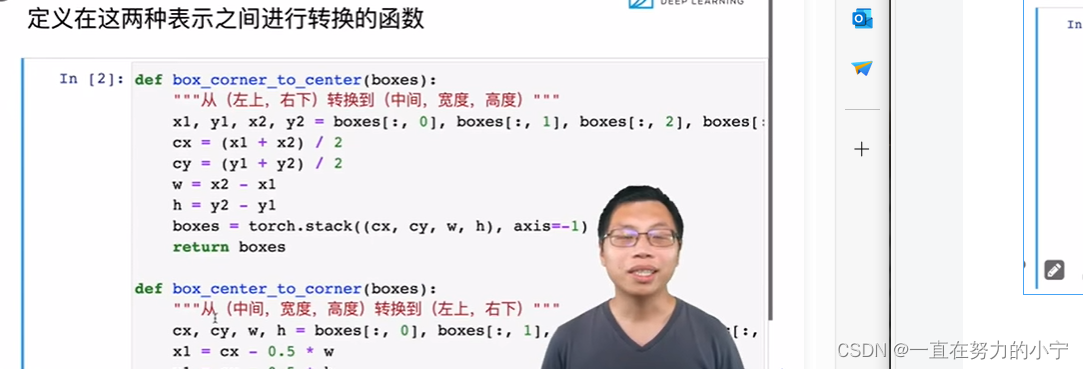
def box_corner_to_center(boxes):"""从(左上,右下)转换到(中间,宽度,高度)"""x1, y1, x2, y2 = boxes[:, 0], boxes[:, 1], boxes[:, 2], boxes[:, 3]cx = (x1 + x2) / 2cy = (y1 + y2) / 2w = x2 - x1h = y2 - y1boxes = torch.stack((cx, cy, w, h), axis=-1)return boxes#@save
def box_center_to_corner(boxes):"""从(中间,宽度,高度)转换到(左上,右下)"""cx, cy, w, h = boxes[:, 0], boxes[:, 1], boxes[:, 2], boxes[:, 3]x1 = cx - 0.5 * wy1 = cy - 0.5 * hx2 = cx + 0.5 * wy2 = cy + 0.5 * hboxes = torch.stack((x1, y1, x2, y2), axis=-1)return boxes# bbox是边界框的英文缩写
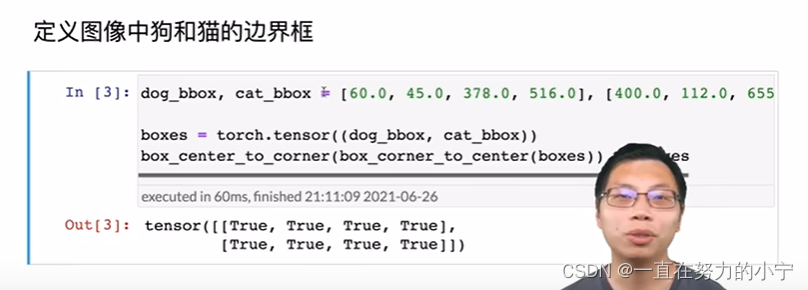
dog_bbox, cat_bbox = [60.0, 45.0, 378.0, 516.0], [400.0, 112.0, 655.0, 493.0]boxes = torch.tensor((dog_bbox, cat_bbox))
box_center_to_corner(box_corner_to_center(boxes)) == boxes#@save
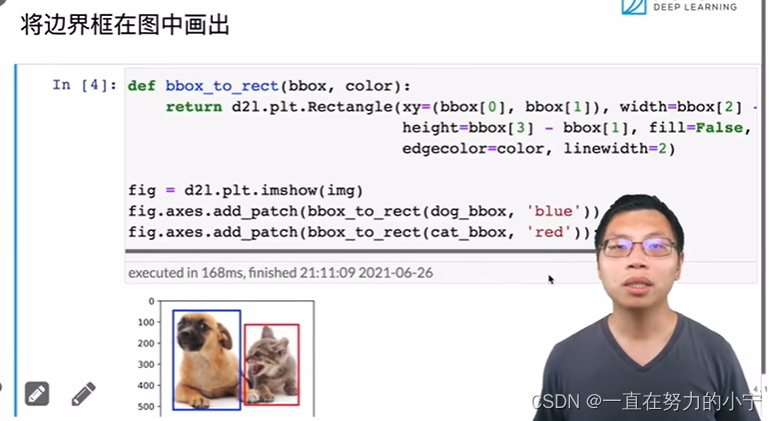
def bbox_to_rect(bbox, color):# 将边界框(左上x,左上y,右下x,右下y)格式转换成matplotlib格式:# ((左上x,左上y),宽,高)return d2l.plt.Rectangle(xy=(bbox[0], bbox[1]), width=bbox[2]-bbox[0], height=bbox[3]-bbox[1],fill=False, edgecolor=color, linewidth=2)fig = d2l.plt.imshow(img)
fig.axes.add_patch(bbox_to_rect(dog_bbox, 'blue'))
fig.axes.add_patch(bbox_to_rect(cat_bbox, 'red'));
3.数据集
%matplotlib inline
import os
import pandas as pd
import torch
import torchvision
from d2l import torch as d2l#@save
d2l.DATA_HUB['banana-detection'] = (d2l.DATA_URL + 'banana-detection.zip','5de26c8fce5ccdea9f91267273464dc968d20d72')#@save
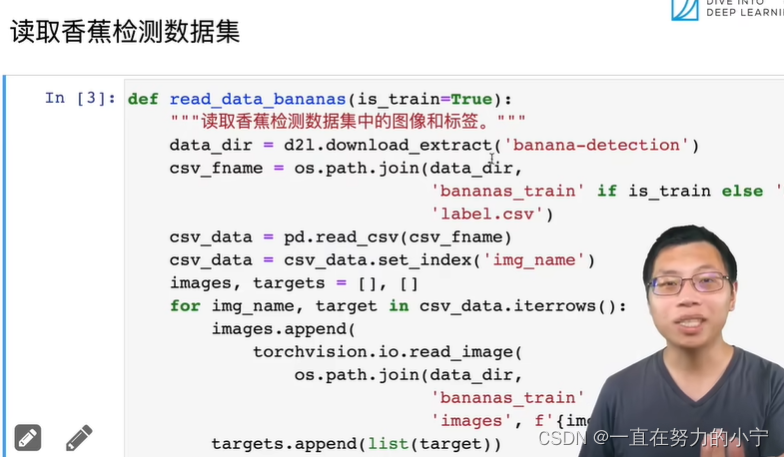
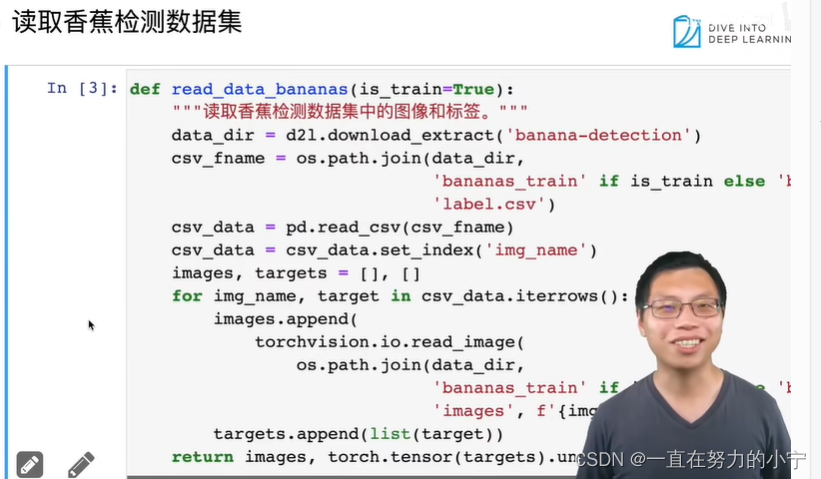
def read_data_bananas(is_train=True):"""读取香蕉检测数据集中的图像和标签"""data_dir = d2l.download_extract('banana-detection')csv_fname = os.path.join(data_dir, 'bananas_train' if is_trainelse 'bananas_val', 'label.csv')csv_data = pd.read_csv(csv_fname)csv_data = csv_data.set_index('img_name')images, targets = [], []for img_name, target in csv_data.iterrows():images.append(torchvision.io.read_image(os.path.join(data_dir, 'bananas_train' if is_train else'bananas_val', 'images', f'{img_name}')))# 这里的target包含(类别,左上角x,左上角y,右下角x,右下角y),# 其中所有图像都具有相同的香蕉类(索引为0)targets.append(list(target))return images, torch.tensor(targets).unsqueeze(1) / 256#@save
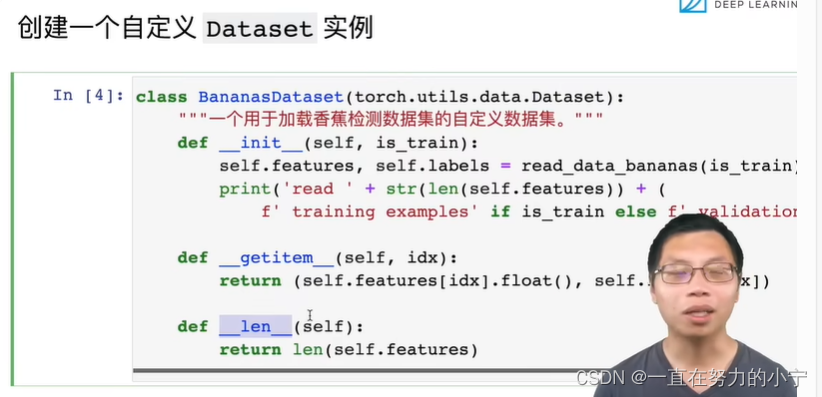
class BananasDataset(torch.utils.data.Dataset):"""一个用于加载香蕉检测数据集的自定义数据集"""def __init__(self, is_train):self.features, self.labels = read_data_bananas(is_train)print('read ' + str(len(self.features)) + (f' training examples' ifis_train else f' validation examples'))def __getitem__(self, idx):return (self.features[idx].float(), self.labels[idx])def __len__(self):return len(self.features)#@save
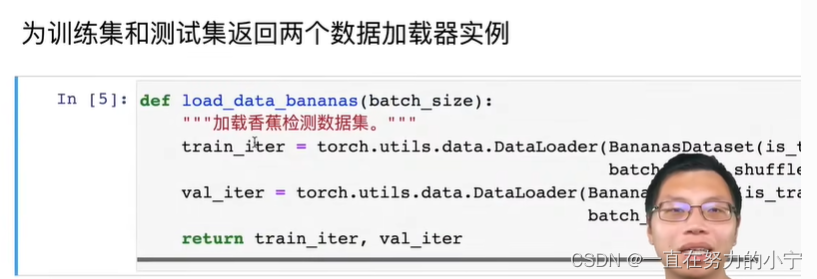
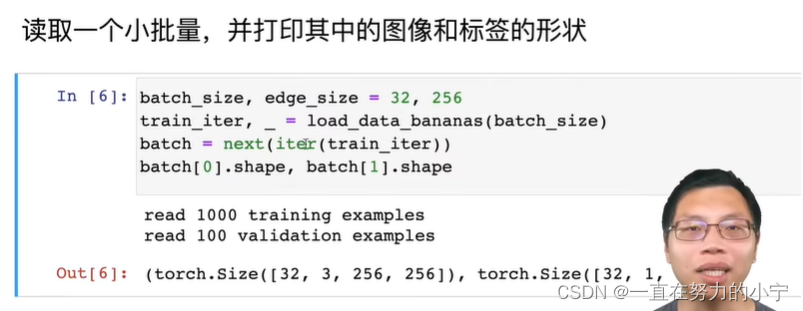
def load_data_bananas(batch_size):"""加载香蕉检测数据集"""train_iter = torch.utils.data.DataLoader(BananasDataset(is_train=True),batch_size, shuffle=True)val_iter = torch.utils.data.DataLoader(BananasDataset(is_train=False),batch_size)return train_iter, val_iterbatch_size, edge_size = 32, 256
train_iter, _ = load_data_bananas(batch_size)
batch = next(iter(train_iter))
batch[0].shape, batch[1].shapeimgs = (batch[0][0:10].permute(0, 2, 3, 1)) / 255
axes = d2l.show_images(imgs, 2, 5, scale=2)
for ax, label in zip(axes, batch[1][0:10]):d2l.show_bboxes(ax, [label[0][1:5] * edge_size], colors=['w'])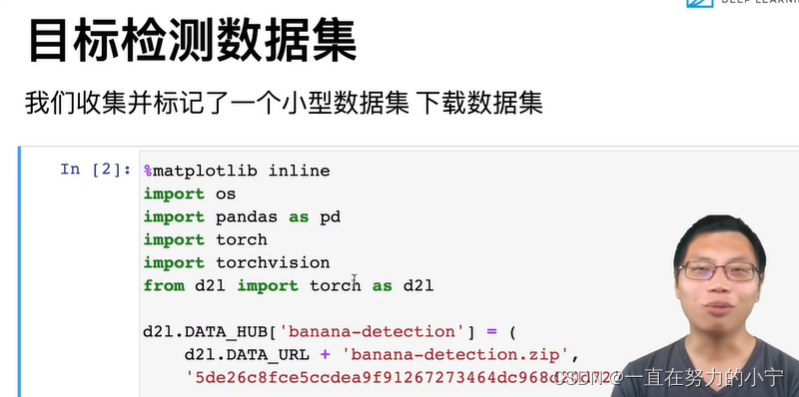

4. 小结
-
目标检测不仅可以识别图像中所有感兴趣的物体,还能识别它们的位置,该位置通常由矩形边界框表示。
-
我们可以在两种常用的边界框表示(中间,宽度,高度)和(左上,右下)坐标之间进行转换。
-
我们收集的香蕉检测数据集可用于演示目标检测模型。
-
用于目标检测的数据加载与图像分类的数据加载类似。但是,在目标检测中,标签还包含真实边界框的信息,它不出现在图像分类中。
这篇关于41 物体检测和目标检测数据集【李沐动手学深度学习v2课程笔记】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





