物体专题

使用C#如何创建人名或其他物体随机分组
《使用C#如何创建人名或其他物体随机分组》文章描述了一个随机分配人员到多个团队的代码示例,包括将人员列表随机化并根据组数分配到不同组,最后按组号排序显示结果... 目录C#创建人名或其他物体随机分组此示例使用以下代码将人员分配到组代码首先将lstPeople ListBox总结C#创建人名或其他物体随机分组

005:VTK世界坐标系中的相机和物体
VTK医学图像处理---世界坐标系中的相机和物体 左侧是成像结果 右侧是世界坐标系中的相机与被观察物体 目录 VTK医学图像处理---世界坐标系中的相机和物体 简介 1 在三维空间中添加坐标系 2 世界坐标系中的相机 3 世界坐标系中vtkImageData的参数 总结:

Unity3D在2D游戏中获取触屏物体的方法
我们的需求是: 假如屏幕中一个棋盘,每个棋子是button构成的,我们希望手指或者鼠标在哪里,就显示那个位置的button信息。 网上有很多获取触屏物体信息的信息的方法如下面代码所示: Camera cam = Camera.main; // pre-defined...if (touch.phase == TouchPhase.Bagan)){ // 如果触控点状态为按下Ray

Unity --- 各种关节(Joints)来模拟物体之间的连接
目录 一:2D关节 一:1 固定关节 (Fixed Joint 2D) 功能: 适用场景: 1. 平台游戏中的固定平台: 2. 拼图游戏中的固定部件: 3. 建筑游戏中的固定结构: 一:2 铰链关节 (Hinge Joint 2D) 功能: 适用场景: 一:3 弹簧关节 (Spring Joint 2D) 功能: 适用场景: 1. 弹性绳索或弹簧: 2. 弹性
行空板上YOLO和Mediapipe视频物体检测的测试
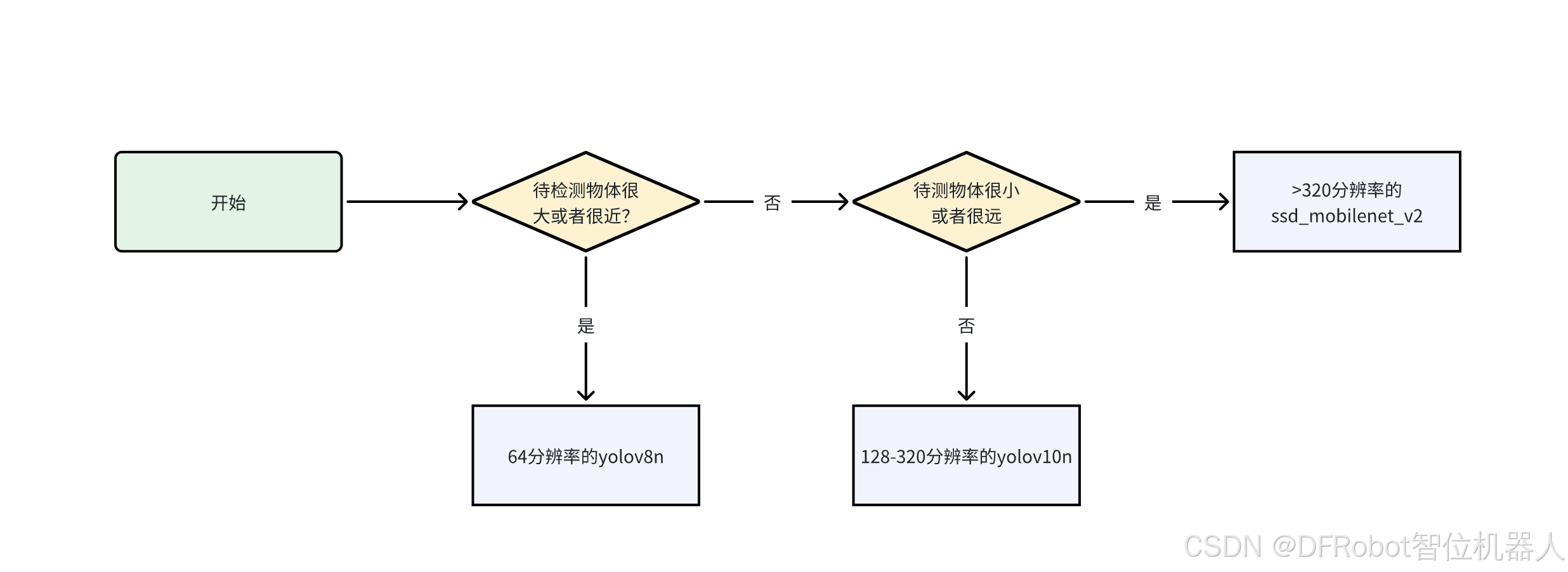
Introduction 经过前面三篇教程帖子(yolov8n在行空板上的运行(中文),yolov10n在行空板上的运行(中文),Mediapipe在行空板上的运行(中文))的介绍,我们对如何使用官方代码在行空板上运行物体检测的AI模型有了基本的概念,并对常见的模型进行了简单的测试和对比。 在行空板上YOLO和Mediapipe图片物体检测的测试(中文)中我们对于行空板上使用YOLO和Medi


unity游戏开发——标记物体 一目了然
Unity游戏开发:标记物体,让开发变得一目了然 “好读书,不求甚解;每有会意,便欣然忘食。” 本文目录: Unity游戏开发 Unity游戏开发:标记物体,让开发变得一目了然前言1. 什么是Tag?2. Unity中如何添加和管理Tag步骤1:打开Tag管理器步骤2:添加自定义Tag步骤3:将Tag应用到物体 3. 如何使用Tag进行对象识别和控制场景1:碰撞检测场景2:查
unity游戏开放:标记物体 一目了然
Unity游戏开发:标记物体,让开发变得一目了然 “好读书,不求甚解;每有会意,便欣然忘食。” 本文目录: Unity游戏开发 Unity游戏开发:标记物体,让开发变得一目了然前言1. 什么是Tag?2. Unity中如何添加和管理Tag步骤1:打开Tag管理器步骤2:添加自定义Tag步骤3:将Tag应用到物体 3. 如何使用Tag进行对象识别和控制场景1:碰撞检测场景2:查

Emgu-WPF 激光雷达研究-移动物体跟踪
接前两篇博客: 激光雷达数据解析并绘制雷达图 https://blog.csdn.net/u013224722/article/details/80738619 激光雷达-移动物体检测 https://blog.csdn.net/u013224722/article/details/80738995 以及仅用WPF处理:绘制2D激光实时图 https://blog.csdn.net/u01

Emgu-WPF 激光雷达研究-移动物体检测
接上篇: https://blog.csdn.net/u013224722/article/details/80738619 先pose出效果图,下次撰写思路。 WPF录屏经典源码分享: https://github.com/NickeManarin/ScreenToGif https://github.com/NickeManarin/ScreenToGif/releases 运动物

Linux移动物体监控程序Motion的移植
所谓移动图像监测,简单来说就是利用摄像头定点监测某个区域,当有移动物体经过时,摄像头便自动抓拍(要监测多大物体、按拍照速率都是可调的),并把拍到的图像存储在指定目录,实现无人监控功能。 在Linux中有一套免费开源的移动物体监控的程序-Motion,它可以抓拍移动物体的图片和视频,并存放在指定目录或者数据库中,下面介绍Motion的移植和安装。 1、源代码下载 http://downl

UE5 摄像机图像采集到材质 映射到 UI 和 物体表面
一.创建SceneCapture2D的组件 二.创建用于 映射的 贴图 三.将RenderTarget贴图放到SceneCapture2D的摄像机上Scene Capture的TextureTarget 四.这个时候的映射贴图,产生的材质可以直接。放到Plane上。 五,但是如果要用于UI,还需要更改SceneCapture2D的摄像机的CaptureSource为 Fin

迪士尼公布最新研究:AR对象可智能地与环境中的物体交互
(52VR修正了原译文的翻译错误并作润饰编辑) 迪士尼的研究人员日前演示了在AR环境中渲染虚拟对象的能力,而这种虚拟对象能够自动与周围的物理环境进行交互。 类似于下边GIF动图所示,你可以将一枚虚拟棘鬣鱼 (52VR编辑:我无法承认它是鱼,这肯定是鱼的“拟狗化”)放置房间中的地板上。根据迪士尼团队的研究,如果你试图用手握住它,棘鬣鱼可以像狗狗一样躲开你,或者跳上你

双目相机实现物体尺寸的精准测量
双目视觉系统是一种模拟人类双眼的立体视觉原理,通过两个摄像头从不同的角度捕捉同一场景的图像,从而获取目标物体的三维信息。 目录 1,设备选型 2,双目相机测量的现实意义 2.1 技术优势 2.2 面对的挑战 2.3 发展趋势 3,双目相机实现上述功能 4,效果验证 1,设备选型 淘宝百元款 2,双目相机测量的现实意义 质量检测:检测产品尺寸是否符合标准,如汽
【Unity基础】Unity中移动物体的8种方法
本文主要介绍物体线性移动方法,是基于3D场景介绍的。当然在2D场景中也有对应的方法。 首先物理学上,物体的运动可以分为运动学和动力学,二者的区别在于是否受外力影响。 具体可以参看《什么是运动学和动力学》。 从运动学方面,是通过改变物体的位置来实现的。在Unity中,可以使用Transform和Vector的属性以及方法来实现。 1. Transform.Position 我们可以直接给物
Unity面试:物体发生碰撞的必要条件?
在Unity 3D游戏开发中,要实现物体之间的碰撞,必须满足一定的条件和配置。以下是体发生碰撞的必要条件: 1. 碰撞体 (Collider) 定义:每个参与碰撞检测的物体都需要有一个碰撞体组件,Unity 提供多种类型的碰撞体(如 Box Collider、Sphere Collider、Capsule Collider 和 Mesh Collider)。配置:确保每个要进行碰撞检测的物体都
构建基于I2C与UART通信的智能嵌入式机械臂抓取系统,结合OpenCV技术进行高效物体识别与动作控制的综合解决方案(代码示例)
在现代工业和智能家居中,智能抓取系统的需求日益增长。本项目旨在设计一个能够识别和抓取不同形状和尺寸物体的机械臂。通过视觉识别、夹爪控制和嵌入式系统集成,智能抓取系统能够大幅提升物体处理的效率和准确性。 项目目标与用途 本项目的主要目标是开发一个智能机械臂,能够在复杂环境中自动识别并抓取各种物体。该系统可广泛应用于生产线自动化、仓储管理、智能家居等领域。 解决的问题与价值 传统的物体抓取方式

yolo2 检测到的物体输出2
说明 检测到的物体被box所标记,输出box所在的位置,并存储到txt中。上次是在src/image.c的代码中修改的,相当于是在画出检测出的物体的框的同时把坐标存入了txt,这次修改的是examples/detector.c文件。 先来看一下主函数 examples/darknet.c 官网上运行的示例测试代码为: 其中运行的主函数的源码就是examples/darknet.

ThreeJS学习-光源对物体表面影响
在threejs中,用网格模型Mesh模拟生活中物体,所以threejs中模拟光照Light对物体表面的影响,就是模拟光照Light对网格模型Mesh表面的影响 //添加光源对象 点光源const pointLight = new THREE.PointLight(0xffffff, 1.0, 0, 0);pointLight.decay = 0.0//距离衰减 不随距离而衰减poin
计算图片中的物体的实际尺寸的一种方法
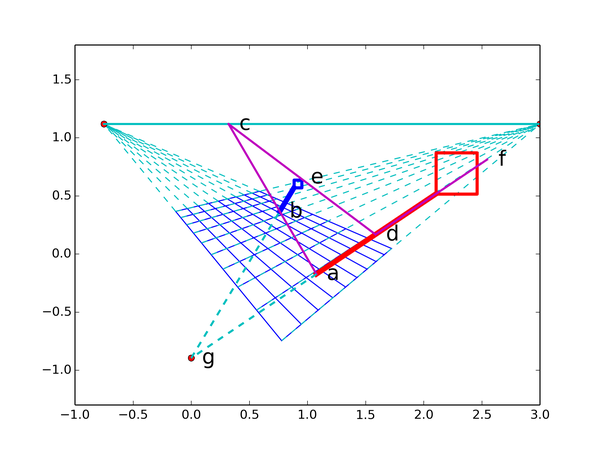
计算图片中的物体的实际尺寸的一种方法 标签: 图片物体尺寸测量地平线交比射影几何 2015-09-15 15:03 1630人阅读 评论(0) 收藏 举报 从一幅图像中无法测出物体的长度,因为缺乏参照物,但可以测出两个平行物体的长度比例。如果已知一个物体的实际大小(比如在图片中放上一枚1元硬币或者知道某个柜子有多高),那么就可以通过长度比和参照物的已知长度测

在结构化场景中基于单目的物体与平面SLAM方案
点云PCL免费知识星球,点云论文速读。 文章:Monocular Object and Plane SLAM in Structured Environments 作者:Shichao Yang, Sebastian Scherer 翻译:particle 本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈分享快乐。 论文阅读模块将分享点云处理,SL

【开源分享】VIDO-SLAM:一种视觉惯性动态物体SLAM系统
文章:Inertial-Only Optimization for Visual-Inertial Initialization 作者:Carlos Campos, Jose M.M. Montiel and Juan D. Tard ´ os´ 代码:https://github.com/bxh1/VIDO-SLAM.git 编译:点云PCL 本文仅做学术分享,如有侵权,请联系删除。欢迎各位加

Unity判断是否点击到UI上,获得具体UI物体
项目中有个点击空白处收起一些操作菜单的需求,以前在NGUI的做法是添加一个不带图片的BoxCollider,然后判断是否点击在这个碰撞盒,UGUI下也可以使用类似的方法,添加一个空的Empty4Raycast来判断点击。本文是在UGUI下,利用EventSystem和射线检测来过滤ui区域,从而实现点击空白事件。 一、EventSystem判断是否点击ui UnityEngine.Eve

UE5 通过蓝图创建物体或实例化子弹
在蓝图中直接找 Spawn Actor from class 节点,把制作好的蓝图球 给到class 即可 在需要的地方使用就会创建一个小球 如下图:

【人工智能】Transformers之Pipeline(十二):零样本物体检测(zero-shot-object-detection)
目录 一、引言 二、零样本物体检测(zero-shot-object-detection) 2.1 概述 2.2 技术原理 2.3 应用场景 2.4.1 pipeline对象实例化参数 2.4.2 pipeline对象使用参数 2.4 pipeline实战 2.5 模型排名 三、总结 一、引言 pipeline(管道)是huggingface trans
Godot利用刚体让3d物体动起来
效果如图 有人说你怎么能控制刚体不是物理引擎控制吗?哈哈,非也,非也,我控制不是刚体而是相机,记住刚体的运动状态是不受玩家控制的,你最多给一个力,但是这个力怎么让物体运动是由物理引擎控制。