本文主要是介绍基于HSV色度空间的图像深度信息提取算法FPGA实现,包含testbench和MATLAB辅助验证程序,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
1.算法运行效果图预览
编辑2.算法运行软件版本
3.部分核心程序
4.算法理论概述
5.算法完整程序工程
1.算法运行效果图预览

将FPGA结果导入到matlab显示结果如下:
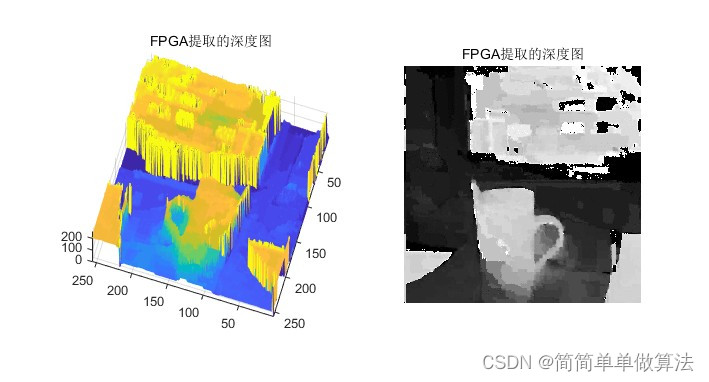
matlab的对比测试结果如下:
 2.算法运行软件版本
2.算法运行软件版本
vivado2019.2
matlab2022a
3.部分核心程序
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 2023/08/01
// Design Name:
// Module Name: RGB2gray
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
//MATLAB/verilog/python/opencv/tensorflow/caffe/C/C++等算法仿真
//微信公众号:matlabworldmodule test_image;reg i_clk;
reg i_rst;
reg [7:0] Rbuff [0:100000];
reg [7:0] Gbuff [0:100000];
reg [7:0] Bbuff [0:100000];
reg [7:0] i_Ir,i_Ig,i_Ib;
wire [10:0]o_depth;integer fids1,dat1,fids2,dat2,fids3,dat3,jj=0;//D:\FPGA_Proj\FPGAtest\codepz
initial
beginfids1 = $fopen("D:\\FPGA_Proj\\FPGAtest\\codepz\\R.bmp","rb");dat1 = $fread(Rbuff,fids1);$fclose(fids1);
endinitial
beginfids2 = $fopen("D:\\FPGA_Proj\\FPGAtest\\codepz\\G.bmp","rb");dat2 = $fread(Gbuff,fids2);$fclose(fids2);
endinitial
beginfids3 = $fopen("D:\\FPGA_Proj\\FPGAtest\\codepz\\B.bmp","rb");dat3 = $fread(Bbuff,fids3);$fclose(fids3);
endinitial
begin
i_clk=1;
i_rst=1;
#1200;
i_rst=0;
end always #5 i_clk=~i_clk;always@(posedge i_clk)
begini_Ir<=Rbuff[jj];i_Ig<=Gbuff[jj];i_Ib<=Bbuff[jj];jj<=jj+1;
endmain_RGB2HSV main_RGB2HSV_u(
.i_clk (i_clk),
.i_rst (i_rst),
.i_image_R (i_Ir),
.i_image_G (i_Ig),
.i_image_B (i_Ib),
.o_depth (o_depth)
);integer fout1;
initial beginfout1 = $fopen("o_depth.txt","w");
endalways @ (posedge i_clk)beginif(jj<=66616 & jj>66616-65536)$fwrite(fout1,"%d\n",o_depth);else$fwrite(fout1,"%d\n",0);
endendmodule
0X_029m4.算法理论概述
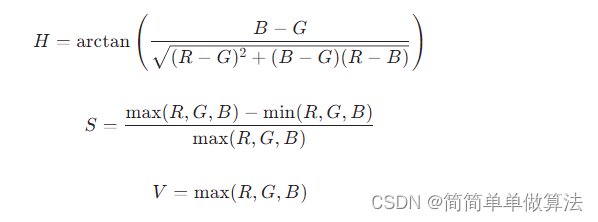
在HSV(Hue, Saturation, Value)色彩模型中,颜色由色调(H)、饱和度(S)和明度(V)三个参数表示。对于深度信息提取而言,通常利用的是场景中物体表面光照变化对明度(Value)的影响,以及色彩相对不变性来推测深度层次。
假设在理想条件下,光源强度恒定且均匀照射到不同距离的物体上,根据逆平方定律,离相机越远的物体接收到的光强会越弱,因此在灰度图像或HSV中的V通道上表现为亮度下降。由此可初步构建从明度到深度的非线性映射关系:
V=k/d+b
其中,V 是明度值,d 是深度,k 和 b 是与光源强度和环境有关的常数。
然而,在实际应用中这种关系需要通过学习或其他图像处理方法获得更精确的模型。
FPGA实现流程概览
输入处理: 将RGB图像转换为HSV色彩空间:
深度信息提取: 设计特定的硬件逻辑单元,利用预训练的或者理论推导出的深度映射函数,将HSV中的V通道值映射到深度估计值。
优化计算资源: FPGA设计中应考虑流水线并行处理多个像素点,以提高计算效率。同时,可能采用查找表(LUT)方式存储预计算好的深度映射关系,减少实时计算负担。
输出与后处理: 输出深度图,可能还需要进行噪声抑制、边缘平滑等后处理步骤,这些也可以在FPGA上实现相应的数字信号处理模块。
需要注意的是,以上描述简化了实际问题的复杂性,真实环境中还需考虑许多其他因素,例如遮挡、反射、阴影等对深度感知的影响。此外,FPGA实现时具体电路设计和算法优化将取决于目标硬件平台的特性及资源限制。
总结来说,基于HSV色度空间的图像深度信息提取在FPGA上实现涉及到色彩空间转换、明度与深度之间的映射建模、以及针对FPGA架构特点的并行计算和资源优化设计等多个环节。
5.算法完整程序工程
OOOOO
OOO
O
这篇关于基于HSV色度空间的图像深度信息提取算法FPGA实现,包含testbench和MATLAB辅助验证程序的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





