本文主要是介绍C#,计算几何,随机点集之三角剖分的德劳内(Delaunay)算法的源代码,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、三角剖分Delaunay算法简介

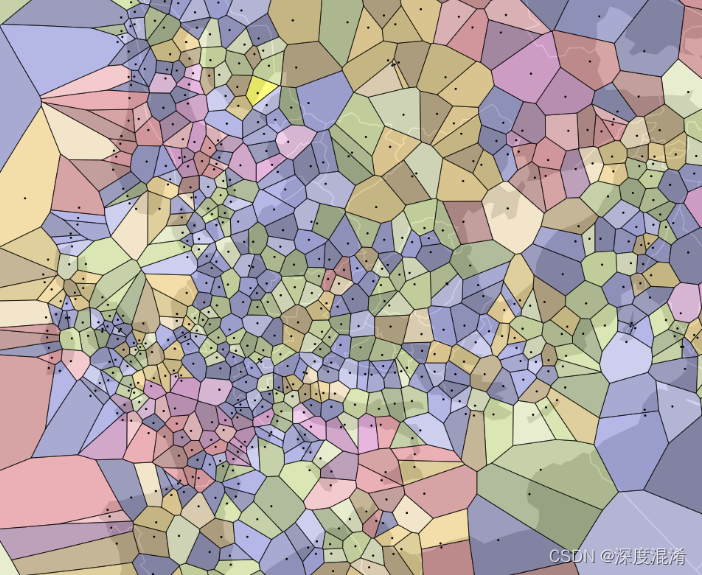
点集的三角剖分(Triangulation),对数值分析(比如有限元分析)以及图形学来说,都是极为重要的一项预处理技术。尤其是Delaunay三角剖分,由于其独特性,关于点集的很多种几何图都和Delaunay三角剖分相关,如Voronoi图,EMST树,Gabriel图等。Delaunay三角剖分有最大化最小角,“最接近于规则化的“的三角网和唯一性(任意四点不能共圆)两个特点。
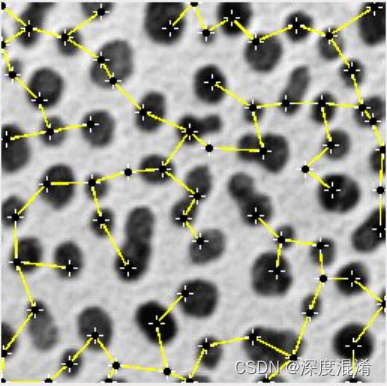
EMST(Euclidean minimum spanning tree)
Delaunay 三角剖分广泛应用于许多不同应用程序中的科学计算。虽然有大量的计算三角剖分的算法,但 Delaunay 三角剖分以其实用的几何属性广受欢迎。

Gabriel Graph
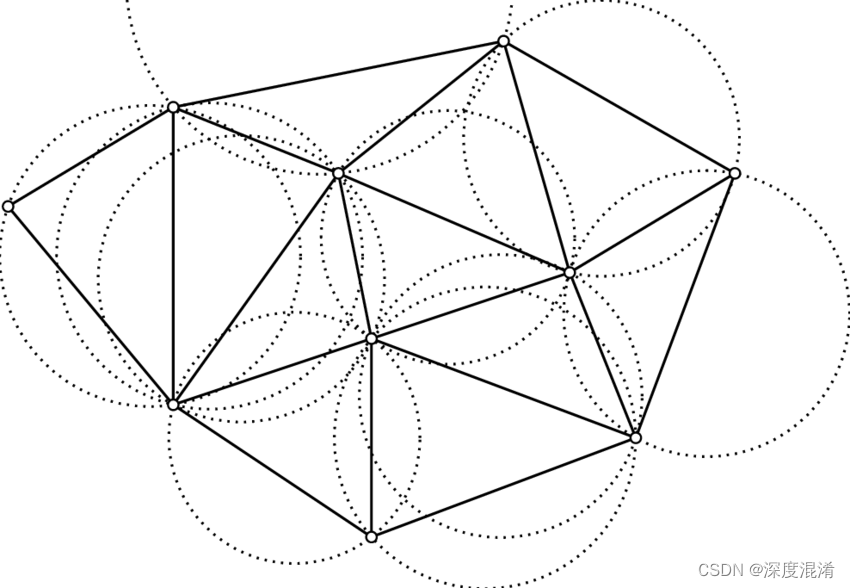
基本属性是 Delaunay 规则。如果是二维三角剖分,通常将其称为空外接圆规则。对于一组二维点而言,这些点的 Delaunay 三角剖分可确保与每个三角形相关的外接圆的内部都不包含其他点。这种三角剖分便是 Delaunay 三角剖分。
Delaunay 三角剖分堪称“外形整齐”,原因在于为满足空外接圆属性,优先选择带有较大内角的三角形,而不是带有较小内角的三角形。非 Delaunay 三角剖分中的三角形在顶点 V2 和 V4 处呈锐角。如果将 {V2, V4} 边替换为连接 V1 和 V3 的边,会实现最小角的最大化并且使得该三角剖分变为 Delaunay 三角剖分。另外,Delaunay 三角剖分将最近邻点的点连接在一起。这两个特征(外形整齐和最近邻点关系)在实践中具有重要的作用,有助于促进在散点数据插值中使用 Delaunay 三角剖分。
虽然 Delaunay 属性定义明确,但存在退化点集时三角剖分的拓扑并不唯一。在二维中,4 个或更多特征点位于同一圆中时会引发退化。例如,正方形的顶点不具有唯一的 Delaunay 三角剖分。
二、三角剖分Delaunay算法的源代码
namespace Legalsoft.Truffer.Algorithm
{public struct Vertex{public int x;public int y;public int z;}public struct Triangle{public int vv0;public int vv1;public int vv2;}public class Delaunay{public const int MaxVertices = 500;public const int MaxTriangles = 1000;public Vertex[] Vertex = new Vertex[MaxVertices];public Triangle[] Triangle = new Triangle[MaxTriangles];private bool InCircle(int xp, int yp, int x1, int y1, int x2, int y2, int x3, int y3, double xc, double yc, double r){double eps;double m1;double m2;double mx1;double mx2;double my1;double my2;double dx;double dy;double rsqr;double drsqr;eps = 0.000000001;if (Math.Abs(y1 - y2) < eps && Math.Abs(y2 - y3) < eps){MessageBox.Show("INCIRCUM - F - Points are coincident !!");return false;}if (Math.Abs(y2 - y1) < eps){m2 = (-(Convert.ToDouble(x3) - Convert.ToDouble(x2)) / (Convert.ToDouble(y3) - Convert.ToDouble(y2)));mx2 = Convert.ToDouble((x2 + x3) / 2.0);my2 = Convert.ToDouble((y2 + y3) / 2.0);xc = Convert.ToDouble((x2 + x1) / 2.0);yc = Convert.ToDouble(m2 * (xc - mx2) + my2);}else if (Math.Abs(y3 - y2) < eps){m1 = (-(Convert.ToDouble(x2) - Convert.ToDouble(x1)) / (Convert.ToDouble(y2) - Convert.ToDouble(y1)));mx1 = Convert.ToDouble((x1 + x2) / 2.0);my1 = Convert.ToDouble((y1 + y2) / 2.0);xc = Convert.ToDouble((x3 + x2) / 2.0);yc = Convert.ToDouble(m1 * (xc - mx1) + my1);}else{m1 = (-(Convert.ToDouble(x2) - Convert.ToDouble(x1)) / (Convert.ToDouble(y2) - Convert.ToDouble(y1)));m2 = (-(Convert.ToDouble(x3) - Convert.ToDouble(x2)) / (Convert.ToDouble(y3) - Convert.ToDouble(y2)));mx1 = Convert.ToDouble((x1 + x2) / 2.0);mx2 = Convert.ToDouble((x2 + x3) / 2.0);my1 = Convert.ToDouble((y1 + y2) / 2.0);my2 = Convert.ToDouble((y2 + y3) / 2.0);xc = Convert.ToDouble((m1 * mx1 - m2 * mx2 + my2 - my1) / (m1 - m2));yc = Convert.ToDouble(m1 * (xc - mx1) + my1);}dx = (Convert.ToDouble(x2) - Convert.ToDouble(xc));dy = (Convert.ToDouble(y2) - Convert.ToDouble(yc));rsqr = Convert.ToDouble(dx * dx + dy * dy);r = Convert.ToDouble(Math.Sqrt(rsqr));dx = Convert.ToDouble(xp - xc);dy = Convert.ToDouble(yp - yc);drsqr = Convert.ToDouble(dx * dx + dy * dy);if (drsqr <= rsqr){return true;}return false;}private int WhichSide(int xp, int yp, int x1, int y1, int x2, int y2){double equation;equation = ((Convert.ToDouble(yp) - Convert.ToDouble(y1)) * (Convert.ToDouble(x2) - Convert.ToDouble(x1))) - ((Convert.ToDouble(y2) - Convert.ToDouble(y1)) * (Convert.ToDouble(xp) - Convert.ToDouble(x1)));if (equation > 0){return -1;}else if (equation == 0){return 0;}else{return 1;}}public int Triangulate(int nvert){bool[] Complete = new bool[MaxTriangles];long[,] Edges = new long[3, MaxTriangles * 3 + 1];int Nedge;int xmin;int xmax;int ymin;int ymax;int xmid;int ymid;double dx;double dy;double dmax;int i;int j;int k;int ntri;double xc = 0.0;double yc = 0.0;double r = 0.0;bool inc;xmin = Vertex[1].x;ymin = Vertex[1].y;xmax = xmin;ymax = ymin;for (i = 2; i <= nvert; i++){if (Vertex[i].x < xmin){xmin = Vertex[i].x;}if (Vertex[i].x > xmax){xmax = Vertex[i].x;}if (Vertex[i].y < ymin){ymin = Vertex[i].y;}if (Vertex[i].y > ymax){ymax = Vertex[i].y;}}dx = Convert.ToDouble(xmax) - Convert.ToDouble(xmin);dy = Convert.ToDouble(ymax) - Convert.ToDouble(ymin);if (dx > dy){dmax = dx;}else{dmax = dy;}xmid = (xmax + xmin) / 2;ymid = (ymax + ymin) / 2;Vertex[nvert + 1].x = Convert.ToInt64(xmid - 2 * dmax);Vertex[nvert + 1].y = Convert.ToInt64(ymid - dmax);Vertex[nvert + 2].x = xmid;Vertex[nvert + 2].y = Convert.ToInt64(ymid + 2 * dmax);Vertex[nvert + 3].x = Convert.ToInt64(xmid + 2 * dmax);Vertex[nvert + 3].y = Convert.ToInt64(ymid - dmax);Triangle[1].vv0 = nvert + 1;Triangle[1].vv1 = nvert + 2;Triangle[1].vv2 = nvert + 3;Complete[1] = false;ntri = 1;for (i = 1; i <= nvert; i++){Nedge = 0;j = 0;do{j = j + 1;if (Complete[j] != true){inc = InCircle(Vertex[i].x, Vertex[i].y, Vertex[Triangle[j].vv0].x, Vertex[Triangle[j].vv0].y, Vertex[Triangle[j].vv1].x, Vertex[Triangle[j].vv1].y, Vertex[Triangle[j].vv2].x, Vertex[Triangle[j].vv2].y, xc, yc, r);if (inc){Edges[1, Nedge + 1] = Triangle[j].vv0;Edges[2, Nedge + 1] = Triangle[j].vv1;Edges[1, Nedge + 2] = Triangle[j].vv1;Edges[2, Nedge + 2] = Triangle[j].vv2;Edges[1, Nedge + 3] = Triangle[j].vv2;Edges[2, Nedge + 3] = Triangle[j].vv0;Nedge = Nedge + 3;Triangle[j].vv0 = Triangle[ntri].vv0;Triangle[j].vv1 = Triangle[ntri].vv1;Triangle[j].vv2 = Triangle[ntri].vv2;Complete[j] = Complete[ntri];j = j - 1;ntri = ntri - 1;}}}while (j < ntri);for (j = 1; j <= Nedge - 1; j++){if (Edges[1, j] != 0 && Edges[2, j] != 0){for (k = j + 1; k <= Nedge; k++){if (Edges[1, k] != 0 && Edges[2, k] != 0){if (Edges[1, j] == Edges[2, k]){if (Edges[2, j] == Edges[1, k]){Edges[1, j] = 0;Edges[2, j] = 0;Edges[1, k] = 0;Edges[2, k] = 0;}}}}}}for (j = 1; j <= Nedge; j++){if (Edges[1, j] != 0 && Edges[2, j] != 0){ntri = ntri + 1;Triangle[ntri].vv0 = Edges[1, j];Triangle[ntri].vv1 = Edges[2, j];Triangle[ntri].vv2 = i;Complete[ntri] = false;}}}i = 0;do{i = i + 1;if (Triangle[i].vv0 > nvert || Triangle[i].vv1 > nvert || Triangle[i].vv2 > nvert){Triangle[i].vv0 = Triangle[ntri].vv0;Triangle[i].vv1 = Triangle[ntri].vv1;Triangle[i].vv2 = Triangle[ntri].vv2;i = i - 1;ntri = ntri - 1;}}while (i < ntri);return ntri;}}
}——————————————————————
POWER BY 315SOFT.COM &
TRUFFER.CN
这篇关于C#,计算几何,随机点集之三角剖分的德劳内(Delaunay)算法的源代码的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




