点集专题

OpenCV结构分析与形状描述符(8)点集凸包计算函数convexHull()的使用
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C++11 算法描述 查找一个点集的凸包。 函数 cv::convexHull 使用斯克拉斯基算法(Sklansky’s algorithm)来查找一个二维点集的凸包,在当前实现中该算法的时间复杂度为 O(N logN)。 函数 cv::convexHull 是

poj 3692 Kindergarten(最大独立点集 + 二分图最大匹配)
http://poj.org/problem?id=3692 题意:在幼儿园中,有许多小孩。其中有男孩,也有女孩。女孩之间相互认识,男孩之间也相互认识。同时,一些男孩和女孩之间也相互认识,有一天,老师希望从所有人之中选出一些人来玩游戏,这个游戏需要所有的参与者之间相互认识,问老师可以最多找出多少人来玩这个游戏。 思路: 如果将男孩女孩看做顶点,男女之间的认识关系看做边,那么本题就
在点集的新知识面前百年集论不堪一击
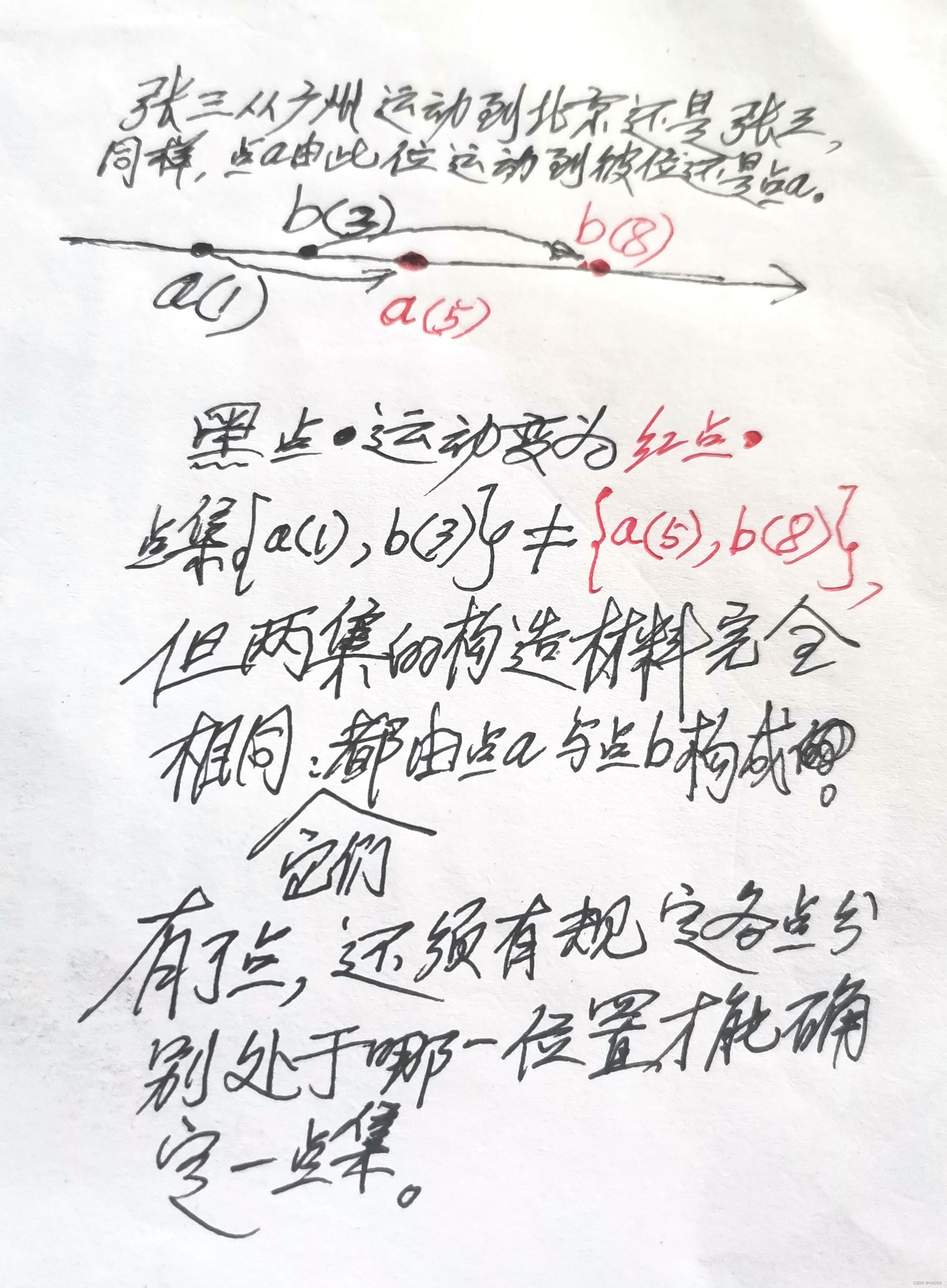
黄小宁 与x∈R相异(等)的实数均可表为y=x+δ(增量δ可=0也可≠0),因各实数的绝对值都可是表示长度的数故各实数都可是数轴上点的坐标,于是x∈R变换为实数y=x+δ的几何意义可是:一维空间“管道”g内R轴上的质点x∈R(x是点的坐标)运动到新的位置y=x+δ还在管道g内(设各点只作位置改变而没别的改变即变位前后的质点是同一点)即实数的改变可形象化为g内质点的位置的改变。 有了面粉等食用材

pytorch 计算点集内或矩阵内两两元素之间的距离矩阵
前言:时间紧可直接看4,5两条。 1. 这一功能在python内或numpy内有现成的工具包 from scipy.spatial import distance# 以下两种方式视情况选择scipy.spatial.distance.pdist()scipy.spatial.distance.cdist() 在神经网络的训练过程中,应用以上工具包需要把torch.tensor转变成
C#,计算几何,随机点集之三角剖分的德劳内(Delaunay)算法的源代码
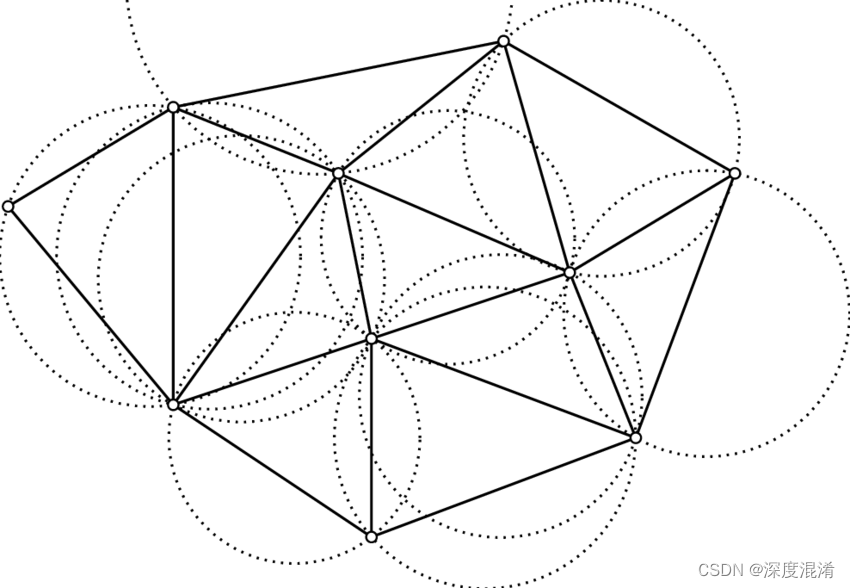
一、三角剖分Delaunay算法简介 点集的三角剖分(Triangulation),对数值分析(比如有限元分析)以及图形学来说,都是极为重要的一项预处理技术。尤其是Delaunay三角剖分,由于其独特性,关于点集的很多种几何图都和Delaunay三角剖分相关,如Voronoi图,EMST树,Gabriel图等。Delaunay三角剖分有最大化最小角,“最接近于规则化的“的三角网和

(5)Elastix图像配准:点集配准(局部区域的精度微调)
文章目录 前言一、原理详解二、参数详解三、项目实战:点集配准3.1、参数文件:parameter_file_points_2D.txt3.2、坐标文件:fixed_points.txt3.3、坐标文件:moving_points.txt 前言 (1)Elastix图像配准:原理 + 源码(详解) (2)Elastix图像配准:参数文件(配准精度的关键) (3)
二维点集的凸包点寻找算法
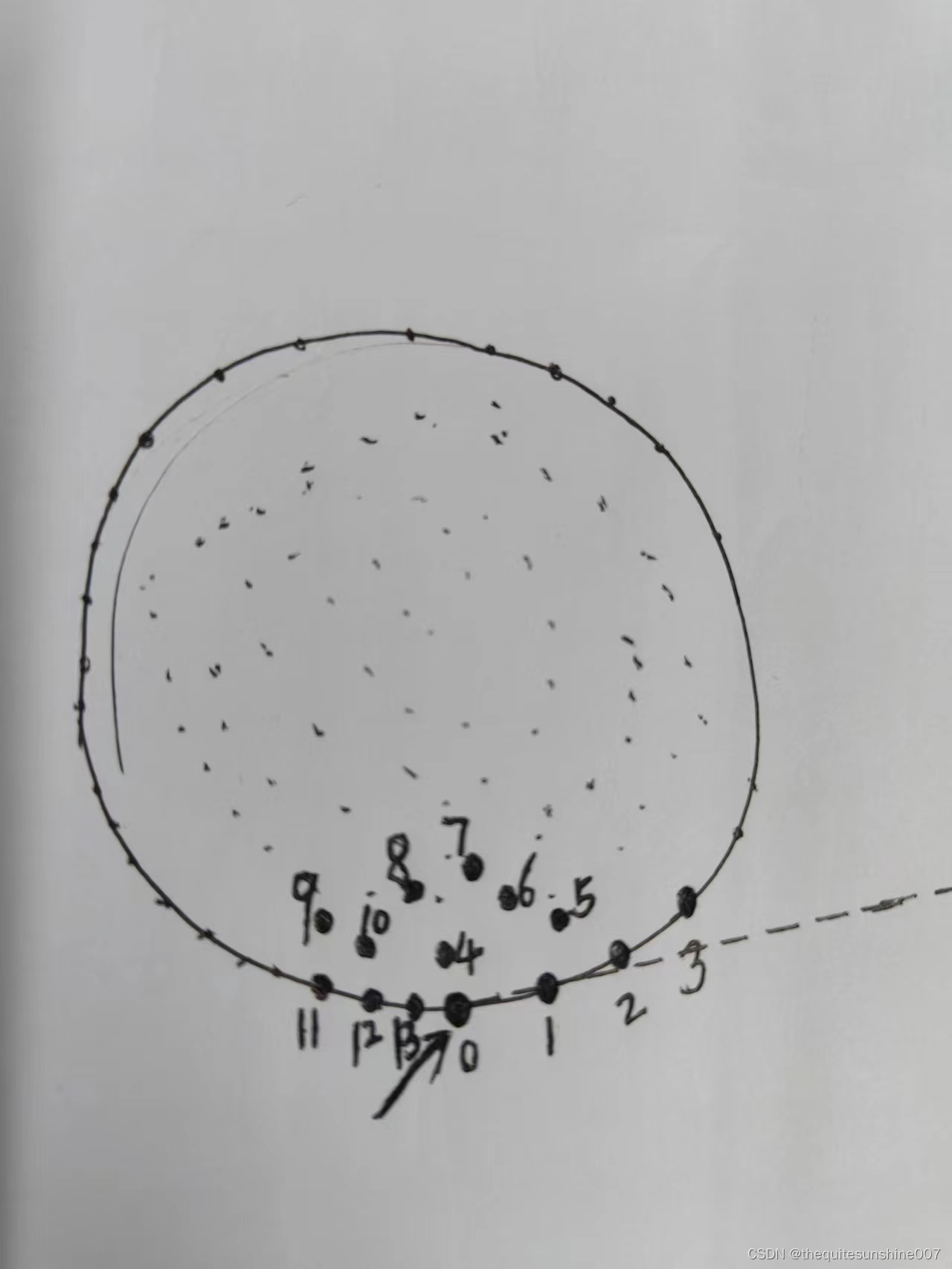
1. 思路 利用凸凹最直接的性质去判断,即:两个相近的凸点组成的直线,将会把他们的近邻点完全隔离在直线的同一侧。如此一来,先选取一个明显的凸点,如y坐标最小的点,以它为出发点,贪婪式搜寻即可。 如下图所示: 假设0点为y坐标最小的点,图中带编号的点为其近邻点(kd-tree加速查找),遍历编号1~13的点,当遍历到点1时,点0点1组成的直线将点2~点13完全隔离在直线同一侧(条件),满足

多维点集问题的分治技术
多维点集问题的分治技术 1. 引言2. 分治技术3. 支配问题3.1 经验累积分布函数3.2 经验累积分布函数的搜索问题(The ECDF searching problem)3.3 最大点问题3.4 范围搜索问题(Range Searching) Appendix AAppendix B 1. 引言 多维点集问题在计算机科学领域有着十分重要的地位,其旨在解决高维空间内最大点

Matlab 对称轴探测(二维点集)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 借鉴之前的思路Matlab 点云对称性检测,我们也可以对一个二维点集进行对称性的探测以找到合适的对称轴。 二、实现代码 %% *********

转载:平面点集凸壳算法大全(英文)
转载自:http://www.tcs.fudan.edu.cn/rudolf/Courses/Algorithms/Alg_cs_07w/Webprojects/Zhaobo_hull/#section26 Introduction Algorithms Brute force Graham's scan Jarvis' march(gift wrapping)

PointNet:用于3D分类和分割的点集深度学习
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation 翻译点云论文的开山之作《 PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation》 摘要 点云是一种重要的几何数据结构。由于其格式不规则,大多
LA - 3415 - Guardian of Decency(二分图最大独立点集)
题意:有N个学生,现要从中选出尽量多的学生,使得选出来的学生中任意两个学生满足至少满足下列4个条件中的1个: 1.身高相差超过40 2.同性 3.喜欢的音乐类型不同 4.喜欢的运动类型相同 问最多能选出多少个学生(测试组数T <= 100, N <= 500, 音乐类型和运动类型的字符串长度不超过100)。 题目链接:https://icpcarchive.ecs.baylor.edu

从二维点集重建平面形状-浅议凹包算法 - JumancoHide
出处: http://www.cnblogs.com/chnhideyoshi/ 问题背景 近期遇到一个计算几何问题,需要从点集中重建一个合理的几何形状。这个问题既有二维的也有三维的,二维的情况相对简单一点,即给出平面区域的一系列散点,求出一定程度上反映这些散点轮廓的平面多边形,给出边的连接方式即可。如从下图的左图散点重建为右图的形状: 二维平面散点 平面多边形
使用 PointNet 进行3D点集(即点云)的分类
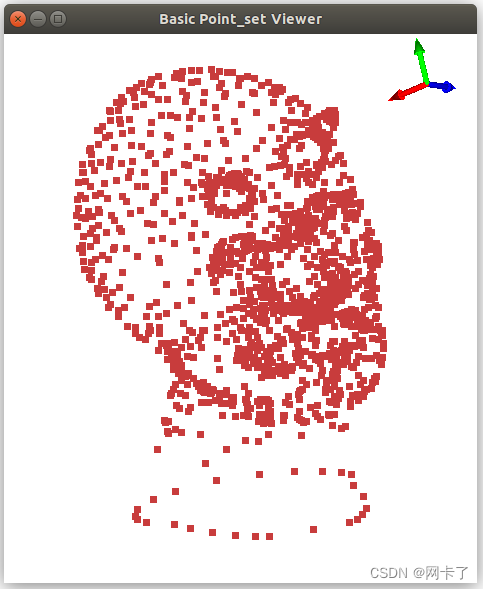
点云分类 介绍 无序3D点集(即点云)的分类、检测和分割是计算机视觉中的核心问题。此示例实现了开创性的点云深度学习论文PointNet(Qi 等人,2017)。 设置 如果使用 colab 首先安装 trimesh !pip install trimesh。 import osimport globimport trimeshimport numpy as npimport t
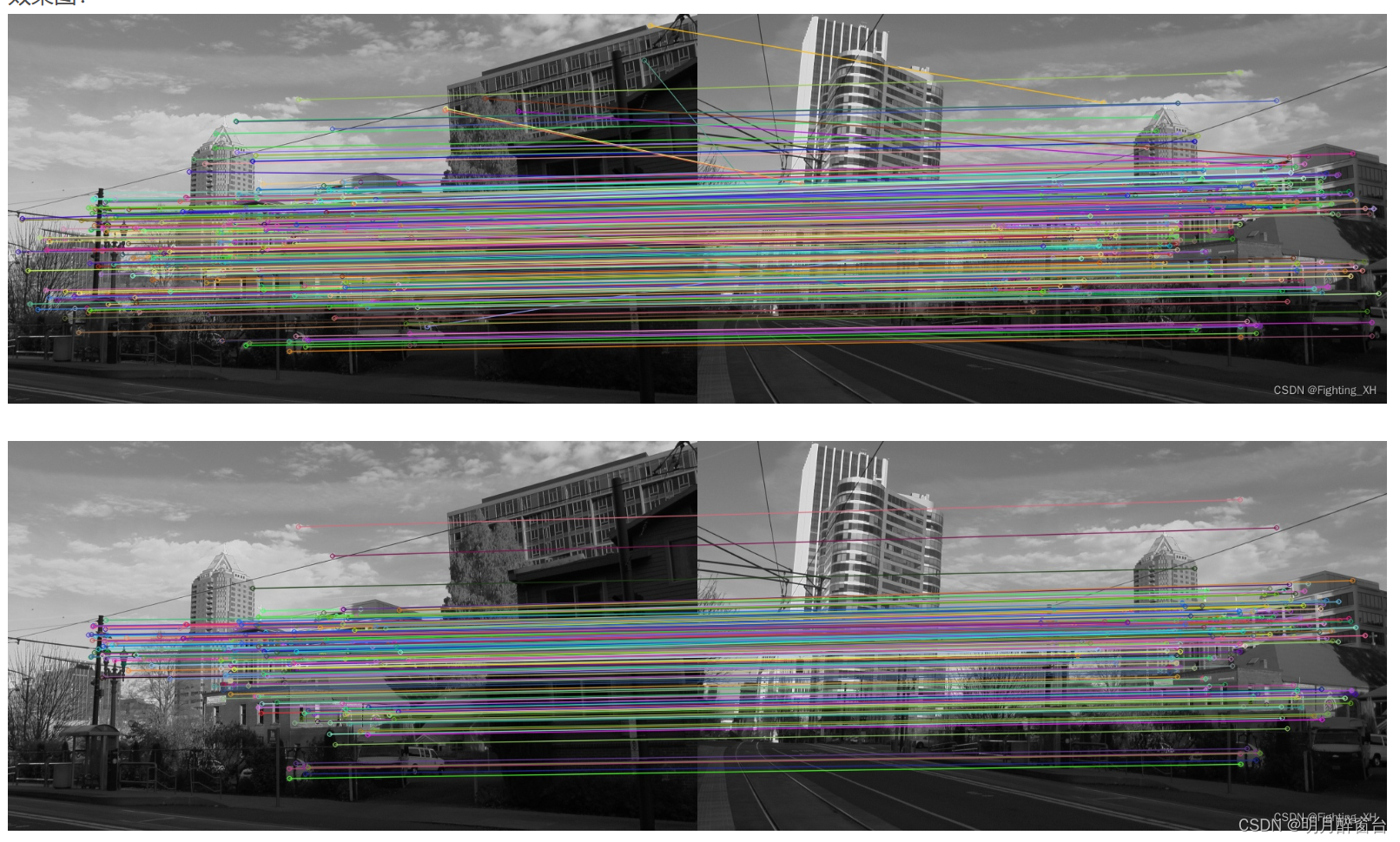
Opencv之RANSAC算法用于直线拟合及特征点集匹配详解
Opencv之RANSAC算法用于直线拟合及特征点集匹配详解 讲述Ransac拟合与最小二乘在曲线拟合上的优缺点 讲述在进行特征点匹配时,最近邻匹配与Ransac匹配的不同之处 另外,Ransac也被用于椭圆拟合、变换矩阵求解等 1. 直线拟合 1.1 原理 RANSAC(RANdom SAmple Consensus,随机采样一致)算法是从一组含有“外点”(outliers)的
Opencv之RANSAC算法用于直线拟合及特征点集匹配详解
Opencv之RANSAC算法用于直线拟合及特征点集匹配详解 讲述Ransac拟合与最小二乘在曲线拟合上的优缺点 讲述在进行特征点匹配时,最近邻匹配与Ransac匹配的不同之处 另外,Ransac也被用于椭圆拟合、变换矩阵求解等 1. 直线拟合 1.1 原理 RANSAC(RANdom SAmple Consensus,随机采样一致)算法是从一组含有“外点”(outliers)的

点集的最小覆盖圆求解
最小覆盖圆问题就是给定一个由n个点组成的点集,寻找一个半径最小的圆,将整个点集包围。求解的方法由很多,例如点增量法和三角形增量法。 参考解析几何--最小圆覆盖_牛客博客 点增量法的步骤如下: 下面针对点增量法,用python进行一步一步实现。 首先,先定义点(point)和距离(distance) class point:def __init__(self, x, y):self.x
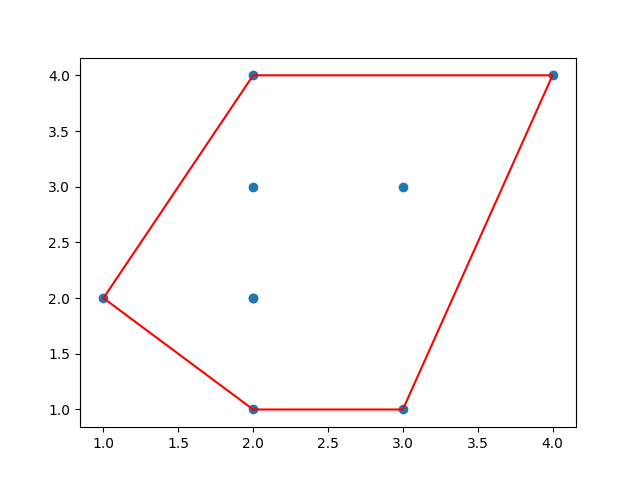
opencv计算点集凸包
点集求凸包的问题经常会遇到,https://www.geeksforgeeks.org/orientation-3-ordered-points/ 给出了一种思路,有空了再仔细研究,本文总结了opencv中相关的方法并给出一个实例。 参考:OpenCV: Structural Analysis and Shape Descriptors 1、opencv接口 hull = cv.con
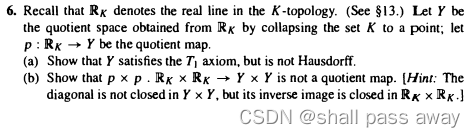

点集拓扑学习(二)球形邻域
定义2 设(X,ρ)为一个度量空间,实数,称 表示的集合,为X中的数y满足条件 y和x的距离小于 为度量空间X中以x为中心,以 为半径的球形邻域 定理1 两个球形邻域的交,表示为多个球形邻域的并