本文主要是介绍opencv计算点集凸包,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
点集求凸包的问题经常会遇到,https://www.geeksforgeeks.org/orientation-3-ordered-points/ 给出了一种思路,有空了再仔细研究,本文总结了opencv中相关的方法并给出一个实例。
参考:OpenCV: Structural Analysis and Shape Descriptors
1、opencv接口
hull = cv.convexHull(points[, hull[, clockwise[, returnPoints]]])参数说明:
- points:点集。需要注意的是,该参数输入的坐标系是向右为X,向上为Y,和迪卡尔坐标系是相同的,而opencv中的图像坐标系是向右为X,向下为Y,即图像的左上角坐标为(0,0)。
- clockwise:如果设置为True,输出的凸包是顺时针的,如果设置为False,输出的凸包是逆时针的。
- returnPoints:如果设置为True,返回凸包的点坐标,如果设置为False,输出凸包点在点集points中的序号。
2、示例
代码如下:
# encoding:utf-8import numpy as np
import cv2
import matplotlib.pyplot as pltaxis_list = [[3,1],[2,2],[3,3],[4,4],[2,4],[2,3],[1,2],[2,2],[2,1]]
axis_list = np.array(axis_list)hull = cv2.convexHull(axis_list,clockwise=True,returnPoints=True)
print(hull)hull = np.squeeze(hull)
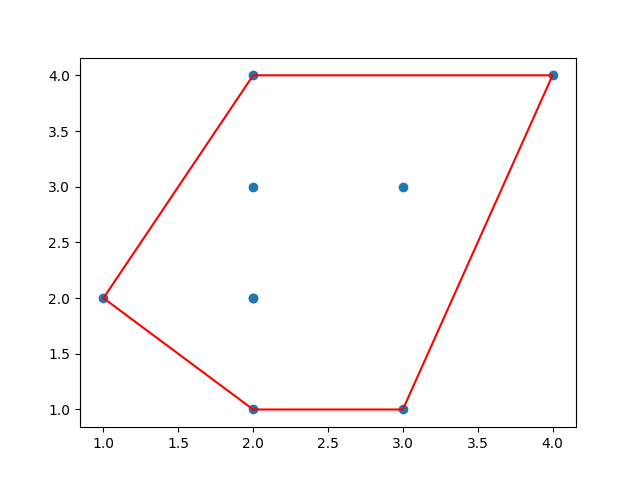
plt.scatter(axis_list[:,0],axis_list[:,1])
plt.plot(hull[:,0],hull[:,1],"r")
plt.plot([hull[-1,0],hull[0,0]],[hull[-1,1],hull[0,1]],"r")
plt.show()计算结果如下图所示,其中蓝色点是点集,红色线条是凸包轮廓。
这篇关于opencv计算点集凸包的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






