本文主要是介绍lidar poisson构网,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
lidar poisson构网
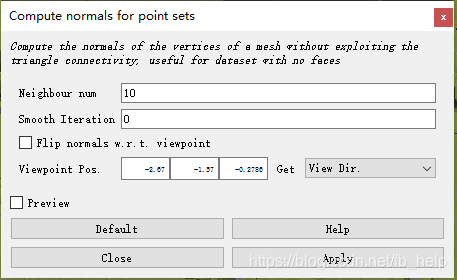
计算站点法向
先点default,再勾选Flip normals wrt viewpoint
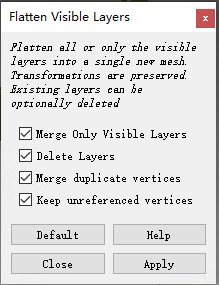
对齐合并点云
第四个必勾选
Poisson构建
PoissonRecon --in eagle.points.ply --out eagle.screened.color.ply --depth 10 --density
SurfaceTrimmer --in eagle.screened.color.ply --out eagle.screened.color.trimmed.ply --trim 7
–depth --trim
13和10也可以
这篇关于lidar poisson构网的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!