



相关文章

LiDAR 8 激光雷达行业
激光雷达应用的领域特别广泛,在无人驾驶上的应用受到很大的关注。 全球汽车领域激光雷达的厂商, 生态链厂商, 相信激光雷达在产品和技术上的发展还会有很广阔的天地。

LiDAR 7 消费电子3D应用
消费电子3D应用 Depth Camera,AR Glass,类似 Microsoft Azure Kinect,Intel RealSense,iPhone/ iPad 等产品。 Microsoft Azure Kinect: Intel RealSense: iPhone/ iPad: 光源是VCSEL。另一个集成MEMS mirror的深度相机示例: ST的AR Glass方案,采用

LiDAR 5 相控阵激光雷达 (OPA LiDAR)
OPA LiDAR相控阵激光雷达的技术核心是OPA scanner。Quanergy S3激光雷达Transmitter OPA: Leddar Tech OPA LiDAR模块: 相控阵Phase array实现方式: Phase array/ Emitter/ Antenna结构:

LiDAR 4 固态激光雷达 (Flash LiDAR)
固态激光雷达分为Flash LiDAR和OPA (Optical Phased Array) LiDAR,Flash LiDAR是非扫描式的,OPA LiDAR 是扫描式的。Flash LiDAR的发射光源和接收部件都是阵列式结构。 Leddar Tech的Flash LiDAR模块, Linear array光源从上至下依次点亮,形成一个点阵面。 Ibeo的方案, 发射光源为VCSEL,128列

LiDAR 3 MEMS激光雷达
与传统机械雷达相比,MEMS (Micro-Electro-Mechanical Systems) 激光雷达使用微型的MEMS mirror反射光线,用微机电执行器代替电机,有些厂商也称MEMS激光雷达为固态雷达。 以Leddar Tech的MEMS激光雷达模块为例, 另外一个示例 MEMS micro-mirror有电磁式Electro-Magnetic,压电式Thin-Film Piezo

LiDAR 2 机械激光雷达
实例分析Valeo SCALA I, SICK LMS291, Velodyne HDL-64E, Livox(DJI) MID-70几款激光雷达,机械激光雷达特点是通过电动执行器带动镜面,透镜或者机体旋转进行扫描。 Valeo SCALA I 利用多边体镜面反射光束,并由电机带动高速旋转。当几个镜面角度不一样时,可以发射出几道光幕。工作原理: SICK LMS291 一个比较

LiDAR 1 基础
激光的形成过程: 原子内的电子有低能量状态和高能量状态,低能量电子吸收能量进入高能量活跃态,恢复低能量时发射光子。 通过高电压在谐振腔内触发激光 不同的介质可以触发不同频段的激光 激光雷达使用的是红外波段的非可见光 TOF(time of fight) 测距原理,通过测量光的传播时间计算距离。系统架构:
自动驾驶---Perception之Lidar点云3D检测
1 背景 Lidar点云技术的出现是基于摄影测量技术的发展、计算机及高新技术的推动以及全球定位系统和惯性导航系统的发展,使得通过激光束获取高精度的三维数据成为可能。随着技术的不断进步和应用领域的拓展,Lidar点云技术将在测绘、遥感、环境监测、机器人等领域发挥越来越重要的作用。 目前全球范围内纯视觉方案的车企主要包括特斯拉和集越,在达到同等性能的前提下,纯视觉方
扫地机LiDAR形态之美
石头扫地机V20 LiDAR: Flash光源和Spot光源切换 图来自 Robot森 LiDAR(Light Detection and Ranging,激光雷达)技术在扫地机器人中的应用,不仅提升了机器的智能性和实用性,还展现了一种科技与艺术的融合之美。 一、外观设计的精致性 紧凑与轻巧:扫地机器人的LiDAR传感器通常被设计得十分紧凑和轻巧,这样不仅便于机器人灵活移动,
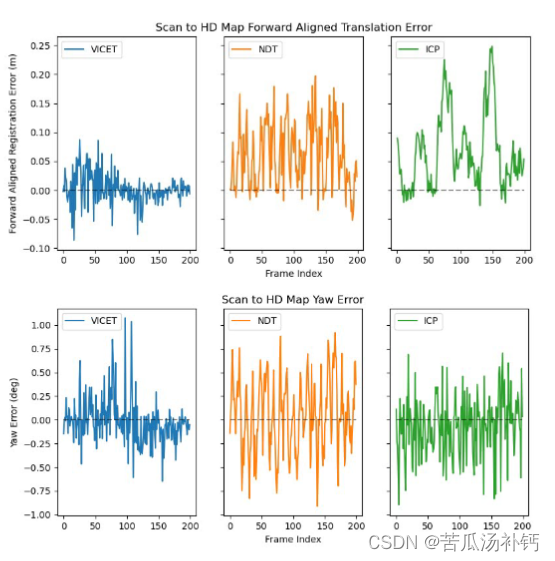
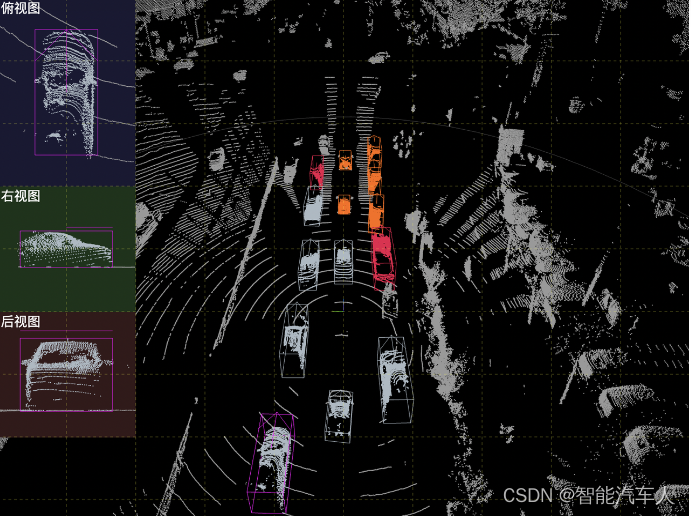
论文阅读:Correcting Motion Distortion for LIDAR HD-Map Localization
目录 概要 Motivation 整体架构流程 技术细节 小结 论文地址:http://arxiv.org/pdf/2308.13694.pdf 代码地址:https://github.com/mcdermatt/VICET 概要 激光雷达的畸变矫正是一个非常重要的工作。由于扫描式激光雷达传感器需要有限的时间来创建点云,所以一次扫描过程中传感器的运动会导致点云发生畸变,这种现