fmcw专题

LiDAR 6 FMCW
FMCW是TOF之外的另一种方式,利用光波的调频实现目标的探测。 光的波粒二象性 多普勒效应 系统架构 当系统的复杂程度上升后,能够采集到的信息也更多,包括距离和速度。采用OPA扫描的FMCW激光雷达设计:
论文速览 | IEEE Symposium on Security and Privacy (SP), 2023 | FMCW雷达反射阵列欺骗攻击
注1:本文系"计算成像最新论文速览"系列之一,致力于简洁清晰地介绍、解读非视距成像领域最新的顶会/顶刊论文(包括但不限于 Nature/Science及其子刊; CVPR, ICCV, ECCV, SIGGRAPH, TPAMI; Light‑Science & Applications, Optica 等)。 本次介绍的论文是:<IEEE Symposium on Security and P

Aeva和采埃孚将首个FMCW激光雷达技术运用于汽车生产
Aeva与全球汽车零部件制造商采埃孚合作,将最先进的频率调制连续波激光雷达传感器投入工业化生产:Aeva的FMCW芯片级激光雷达(LiDAR-on-chip)技术是汽车行业首个提供远距离性能和硅规模级即时测速的技术。全球顶级的一级供应商采埃孚计划将这项技术运用于汽车级批量生产。 加州山景城--(美国商业资讯)--下一代传感和感知系统领域的领导者Aeva和全球顶级的汽车一级供应商采埃孚(ZF

自制合成孔径雷达(9) 声卡实现测距的另一种方法(FMCW)
FMCW雷达或者声呐,其实都是用chirp信号作为信号源,比较接收和发射的频率差,找出对应的时间差,算出距离的。MIT的雷达,除了测速部分在用单音外,都是在用这种信号(包括测距和SAR)。因此,做完上一篇文章的互相关测距,我感觉还不太够,还是得用chirp信号的方法来测距,这样才更符合将来要实现的合成孔径雷达/声呐。 其实这套东西,我之前就找到资料了,就是balint seeber做的演讲提到的
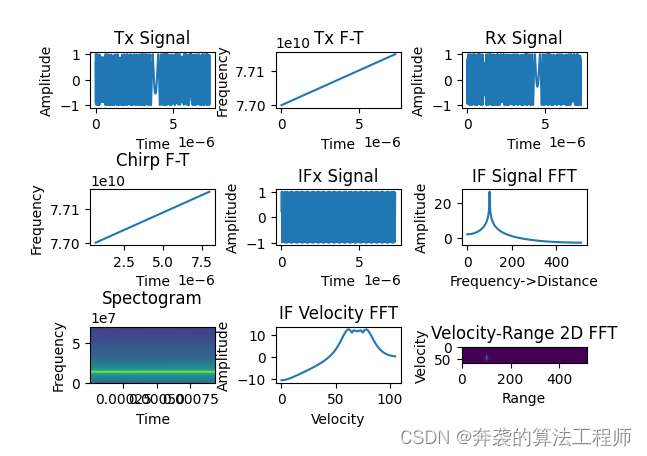
基于python的FMCW雷达工作原理仿真
这篇文章将介绍如何使用python来实现FMCW工作原理的仿真,第1章内容将介绍距离检测原理,第2章内容会介绍速度检测原理。 第1章 第1部分: 距离检测原理 调制的连续波雷达通常也被叫做调频连续波(FMCW)雷达是一个使用频率调制来测量目标的距离的系统。在频率调制中,电磁波的频率随时间线性增加。或者说,发射频率会以恒定速率改变。这种频率随着时间线性增加的信号
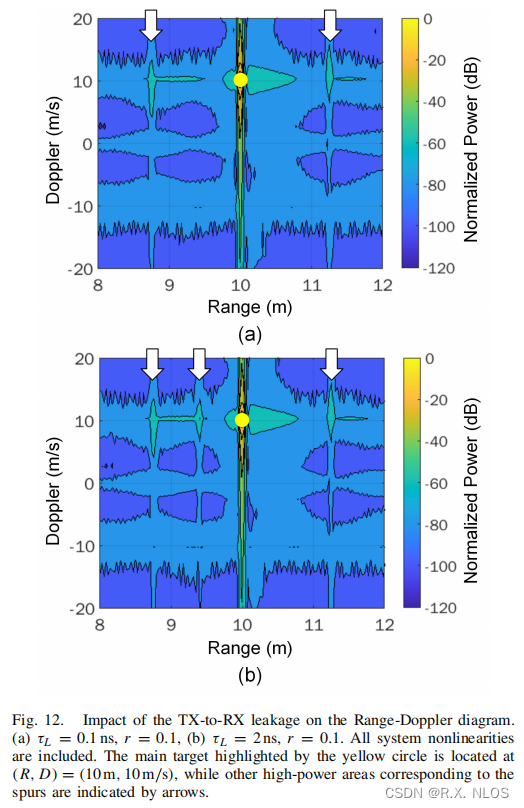
TRS 2023 | Spurs in Millimeter-Wave FMCW Radar System-on-Chip
原始笔记链接: https://mp.weixin.qq.com/s?__biz=Mzg4MjgxMjgyMg==&mid=2247486779&idx=1&sn=c75171844595150abc48d2dd59e7255f&chksm=cf51bfc2f82636d4e3f9c8526d0f25df1bea5496d9945d1e963961fea8c8fd630e7670b99afb#r