本文主要是介绍自制合成孔径雷达(9) 声卡实现测距的另一种方法(FMCW),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
FMCW雷达或者声呐,其实都是用chirp信号作为信号源,比较接收和发射的频率差,找出对应的时间差,算出距离的。MIT的雷达,除了测速部分在用单音外,都是在用这种信号(包括测距和SAR)。因此,做完上一篇文章的互相关测距,我感觉还不太够,还是得用chirp信号的方法来测距,这样才更符合将来要实现的合成孔径雷达/声呐。
其实这套东西,我之前就找到资料了,就是balint seeber做的演讲提到的内容。
SDR实现FMCW雷达和模拟视频解调_哔哩哔哩_bilibili
原理其实很好理解,但是始终调不出来,首先跟上一篇文章类似,有硬件的原因,但也有流图上几个参数导致的原因。哪怕流图画对了,参数不对,也是无法出现能让人理解的图像的。
以下是我成功实现的流图,要注意:
1.锯齿波信号周期要高一些,我设置为了100,当它施加在VCO上时,其实人耳已经听不到忽高忽低的音调了,但是就必须这么高,才会有效果,如果降低到1,能听出音调,但是出不来测距的效果。切记!
2.VCO的采样率和灵敏度也很重要,不知道为啥,balint seeber的演示里,采样率是1,灵敏度是pi,显然不对,采样率就应该是音频硬件采样率48k,灵敏度是48k * pi。
3.multiply const里的500m代表0.5,这个也挺重要,代表要给原始信号衰减一下,不能直接把它与接收信号混频,不然效果也不好。
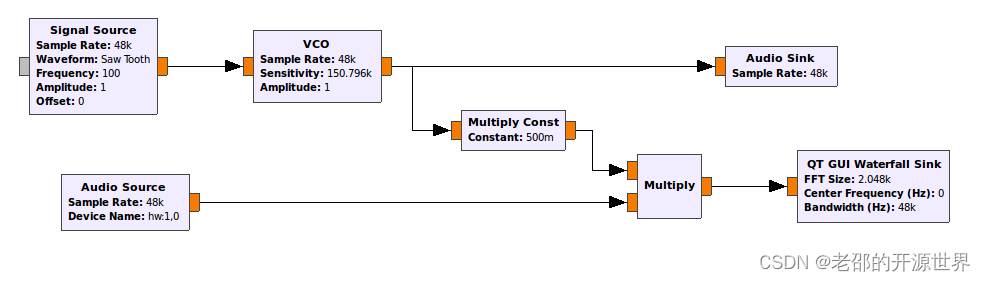
要注意的其实就以上3点,做好它们,你就能看到效果。但是就像之前几片文章说的,实数FFT左右对称,看出来的图形可能有点奇怪。那你也可以参照下图把它变为复数,看起来效果会更好些。

还有个小遗憾,我始终无法用手来反射喇叭的信号给麦克风,只能测喇叭到麦克风的直接距离,这个不影响测距的演示,但是后面如果要做合成孔径声呐就必须能测反射,因为它的原理是通过不同位置的反射来探测物体的形状。
流图:
链接: https://pan.baidu.com/s/1-XMUcZfGHqb3rgHAq8qAHw 提取码: 6ibs
视频:
gnuradio实现测距声呐2(chirp)_哔哩哔哩_bilibili
这篇关于自制合成孔径雷达(9) 声卡实现测距的另一种方法(FMCW)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





